基于无人机的倾斜摄影平台开发
2018-08-30何中海魏鸿辉吕品赖德军
何中海,魏鸿辉,吕品,赖德军
(1.四川省核工业地质调查院,四川 成都 610052; 2.四川省川核测绘地理信息有限公司,四川 成都 610036)
1 引 言
长期以来,“人走步量”是测绘人的工作模式。为获取精准的地理信息,测绘人跋山涉水、常年野外奔波,然而这样的外业劳动存在强度大、工序复杂、成本高等问题。而无人机倾斜摄影技术凭借快速高效、机动灵活、成本低等优势,正慢慢颠覆传统测绘的作业方式,已经成为新一代数字摄影测量研究的核心主题[1]。
无人机倾斜摄影技术,就是在无人机上搭载多台传感器,从垂直、倾斜等不同角度采集影像[2],通过对倾斜影像数据处理并整合其他地理信息,输出正射影像、地形图、三维模型等产品。倾斜影像能从多个角度观察地物,进行包括高度、长度、面积、角度、坡度的量测,弥补了传统正射影像的不足。
从2010年来,倾斜摄影测量技术开始进入国内地理信息行业的视野,它为传统测绘带来了全新的视角。目前倾斜摄影一般采用的都是大型设备和大型飞机,不仅成本高,也具有作业不灵活,限制条件太多等方面的限制。近年来,利用小型无人机进行倾斜摄影数据采集成为一种新的发展方向,它结合了无人机和倾斜摄影技术的优势,发展前景极好。
本文旨在通过对摄影平台结构、相机拍照控制、相机数据传输等多个关键技术的研究,开发出适合小型无人机专用的倾斜摄影平台,摆脱一直以来大型设备和大型飞机的约束,可以更加方便和精细地进行倾斜摄影数据的获取,从而得到更加清晰和精确的三维模型,为城市规划、应急演练、旅游等途径提供更加直观的视觉感受。
2 倾斜摄影平台结构设计
倾斜摄影平台结构设计主要包括相机角度及其支架设计、相机外壳设计、相机减震及连接机构设计、所需材料优化选择几个方面研究,主要遵循的原则是使平台体积最小,重量最轻,以便于无人机挂载。
2.1 相机角度设置及支架设计
摄影系统包括1个正视相机和4个环视相机,构建最佳合理的环视相机之间及环视相机与正视相机之间的位置角度关系,是实现较好效果的关键。本平台采用2 100万像素的半画幅相机, 20 mm定焦镜头,相机机构紧凑,重量较轻,适合无人机搭载。5个相机中,正视相机采用垂直90°放置,其余前视、后视、左视和右视相机采用45度倾斜方式放置。此种角度放置一方面考虑多旋翼或者电动固定翼无人机飞行高度较低,只有较大的倾斜角度才能更好地获取地物侧面纹理,另一方面通过镜头视角和倾斜角度联合计算,此种放置时,侧倾相机和正射相机获取的影像保证了15°夹角的重叠,有利于提高三维重建时的精度和效率。
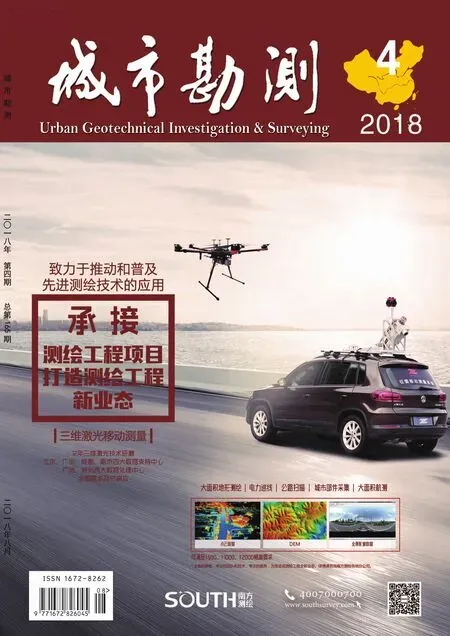
相机内部支架采用中心固定环加四侧板的结构,方便相机固定和安装(如图1所示)。相机中间固定环侧面有一向下的竖板,用于固定正视相机,其余4个侧板以90°夹角呈十字形固定在中间环上,用于放置前视、后视、左视和后视相机。4个侧板整体呈L形,其顶部与中间固定环连接,其底部横面与水平面呈向下的45°夹角,相机分别设置于侧板的底部横面上。正视相机和环视相机的底部均设置有螺纹孔,通过螺丝固定安装于相应的侧板和竖板上。同时,中间固定环的顶部环绕其轴心均匀设置有多个支柱,以用来和外壳的上部主碳板连接,可防止在飞行和拍摄过程中相机抖动影响拍摄,其整体安装效果如图2所示。

图1 相机支架结构图
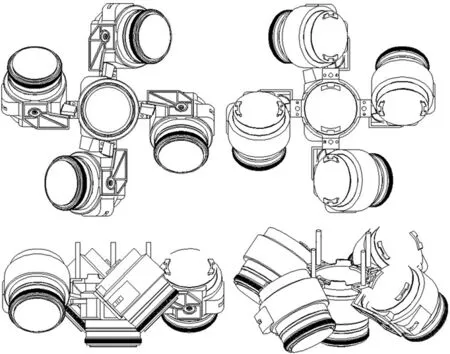
图2 相机安装效果图
2.2 相机外壳设计
相机外壳根据支架和相机镜头位置利用三维设计软件PROE设计完成。外壳底部在镜头开口处使用凹面造型,一方面可以增加对镜头的保护,同时减小外壳对相机采光的影响,另一方面还利于减小平台风阻,节约无人机能耗(如图3所示)。

图3 相机外壳设计图
此外,为了与减震机构和内部支架连接和固定,云台外壳上部采用圆形盖板设计。盖板一方面留有开关、电源以及相机控制按钮等接口孔位,另一方面,盖板中间有4个螺丝孔,与内部支架通过支柱连接固定,边缘均匀分布4个减震装置连接孔位。
2.3 相机减震及连接机构设计
相机减震组采用4组对称挂件设计,挂件由两块小型碳板组成,两侧开孔安装减震球,中间使用螺母螺杆连接飞机平台(如图4所示)。采用此种设计,一方面相机能够方便地挂载到无人机上,另一方面减震机构能够很好地吸收化解无人机的振动,优化成像效果。
图4 减震机构设计图
2.4 材料选择
为了减轻设备重量,利于无人机挂载作业,各个机构的材料选择十分重要。经过综合考虑,此平台内部支架采用铝合金加工成型,既减轻了重量,又保证了结构强度;相机外壳底部采用璃纤维模具加工成型,在保护相机组的同时尽可能地减小了内部空余空间;相机上方圆形盖板采用碳板切割,保证了支架和减震机构的连接强度;其中,减震结构也采用碳板组件,即保证了强度,也进一步减轻了平台重量。最后,支架、圆形碳板、减震机构等连接固定都采用轻质铝柱,最大程度保证平台的重量最小化。
3 倾斜摄影平台电路设计
本平台实施的关键技术之一是控制电路的设计,包括相机拍摄控制、USB数据传输、电源供应。本文中采用跨平台程序开发语言Java实现整个系统所涉及的程序功能,包括电源控制程序、五相机快门电联程序、统一读取USB模块数据程序。结合光耦、继电器、降压电路等硬件设备,通过电路功能设计、排版、制版和调试,最终完成电路模块的制作(如图5所示)。

图5 电路模块图
4 应用案例
在最终完成各项设计和组装工作后,整个倾斜摄影平台重量控制在1.8 kg,体积为23cm*23cm*12cm,适合小型无人机搭载(如图6所示)。

图6 倾斜摄影平台外观图

图7 倾斜摄影平台作业图

图8 平台飞行试验数据三维建模成果
将此倾斜摄影平台挂置到多旋翼无人机中进行试拍(如图7所示),总共飞行 30 min,获取影像 3 000张。在此飞行期间,平台工作正常,相机拍摄照片质量较好,数据传输速率较快,获取的数据满足三维建模要求(如图8所示)。
5 结 语
本研究成果主要从结构设计方面实现了摄影系统的体积最小化,从材料优选方面实现了摄影系统的重量最轻化,从相机位置设计实现了较好效果的倾斜摄影,从挂载组件的设计实现了本摄影系统灵活的挂载方式,从控制电路设计上实现了电源控制器的电联及数据的统一读取方式。通过本项目的研究实现基于无人机应用的倾斜摄影测量系统,让倾斜摄影摆脱一直以来的大型设备和大型飞机的约束,可以更加方便和精细地进行倾斜摄影数据的获取,对倾斜摄影技术的推广有着重要意义。