飞行器野外长时间热待机状态方位姿态研究
2018-08-30赵天承王春喜沙春哲
刘 凯 赵天承 张 捷 周 军 王春喜 沙春哲
(1. 北京航天计量测试技术研究所,北京 100076;2. 北京宇航系统工程研究所,北京 100076;3. 中国运载火箭技术研究院,北京 100076)
1 引 言
随着宇航技术的不断发展,飞行器的种类越来越多,不同的飞行器在发射技术呈现出技术上的多种多样。一些飞行器采用“水平瞄准”方式,通过惯性器件和光学基准传递为飞行器发射系统提供位置信息及发射基准方向。
在这种发射方式中,飞行器在野外水平瞄准后长时间水平待发,期间飞行器方位姿态如果发生较大变化则会影响飞行器的导航及命中精度,因此对飞行器长时间热待机状态下的方位姿态变化进行监测探究十分必要。
2 飞行器方位姿态长时间实时监测系统
如图1所示,监测系统主要由光电自准直仪、经纬仪、温度巡检仪和工业计算机组成。
本监测系统采用光电经纬仪和光电自准直仪相结合的方式进行,光电自准直仪完成对飞行器上瞄准棱镜的实时监测,为克服光电自准直仪自身的方位测量基准随时间漂移,采用经纬仪间隔相应时间对高精度自准直仪进行基准校准。
温度巡检仪完成对分布在飞行器不同位置的10个温度传感器的数据实时采集。系统采集角度数据和温度数据通过串口实时上传到工业计算机并储存。

图1 监测系统组成原理图Fig.1 Composition of monitoring and testing system
2.1 方位角导引法
本飞行器长时间热待机状态方位姿态探究采用“方位角导引法”[1]如图2所示,该方法是依据已知方位角的某条测量线(基准边),经过多次测量仪器的对瞄与测角,导出所求线的方位角。其基本计算公式如下
(1)
式中:Aj——所求线的方位角,(°);A0——已知线的方位角,(°);βi——第i个传递角的实测值,(°);i——传递角的序号,从1至n,共n个传递角。
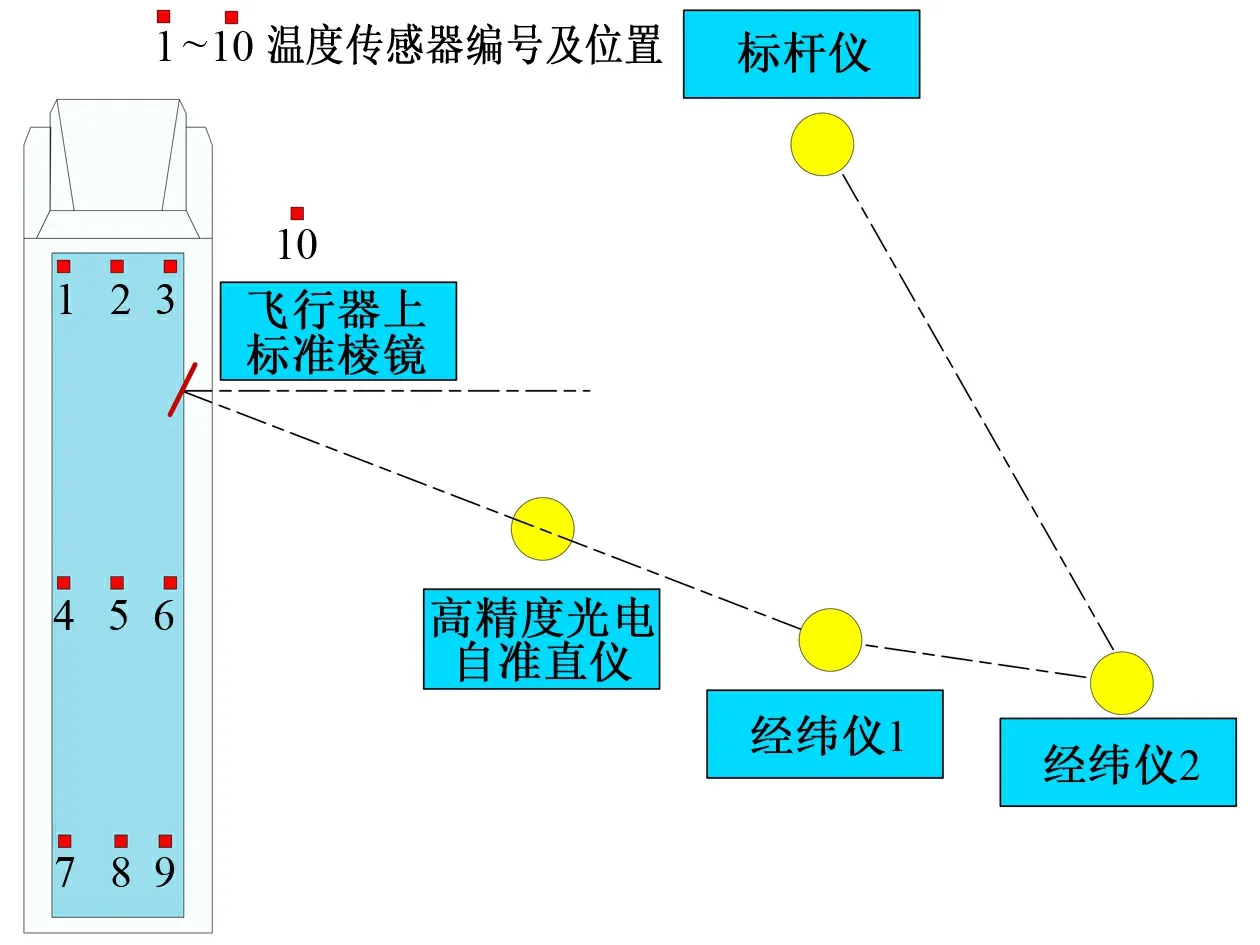
图2 监测系统采用方位角导引法原理示意图Fig.2 Operation principle of monitoring and testing system used azimuth transfer
2.2 高精度光电自准直仪
高精度光电自准直仪利用自准直法对小角度范围内被测反光镜的微小转动进行测量,通过光电探测器对角度偏转信号进行采集,有测量自动化、精度高等优点。
高精度光电自准直仪的物镜筒上安装有瞄准棱镜,如图3所示。使用经纬仪和标杆仪建立相对测量基准边,间隔一定时间使用经纬仪观测高精度光电自准直仪上瞄准棱镜的方位姿态变化来对高精度光电自准直仪的光轴姿态进行修正。

1-瞄准棱镜;2-高精度光电自准直仪图3 高精度光电自准直仪与瞄准棱镜Fig.3 Operation principle of autocollimator
在利用外部基准对整机进行装调及修正,光电信号经过自适应采样、滑动滤波等处理后,光电自准直仪可以克服元件非线性、环境杂散光、被测件扰动像等的影响,监测系统在±1000″范围内测角精度可达0.7″(1δ)。
2.3 经纬仪
经纬仪是大地测量的基本仪器,具有能适应野外测绘条件的特点[2],本监测系统中电子经纬仪采用旋转光栅式测角系统,有效的消减了分度元件的刻划误差,使经纬仪的测角标准偏差达到0.5″[3]。
2.4 标杆仪
标杆仪与经纬仪组合用于将地面上的地标点引出至地面的一定高度[4],方便经纬仪的对准。在测量时,将在场坪地面上的两点连线作为相对的方位基准边;标杆仪和经纬仪2的回转中心分别与这两点对齐,经纬仪2对准标杆后即可将方位基准引出,经纬仪1再将利用此基准观测自准直仪的方位变化。如图4所示为本监测系统所用标杆仪,其对心误差不大于0.5mm。

图4 标杆仪Fig.4 Pole instrument
2.5 温度测量模块
根据以往测量经验,造成飞行器在水平状态长时间热待机时方位变化的主要影响因素可能是日照等环境因素造成的飞行器表面的温度不均匀,因此使用温度巡检仪监测飞行器表面温度,其技术指标如表1,温度巡检仪可以同时采集10个温度传感器的测试数据,传感器布置如图2所示。
温度巡检仪采用PT100热电阻贴片温度传感器,配合温度巡检仪将温度信号变送为数字信号输出,传输距离远、精度高。测量时使用专用黏结剂将传感器固定在飞行器上。
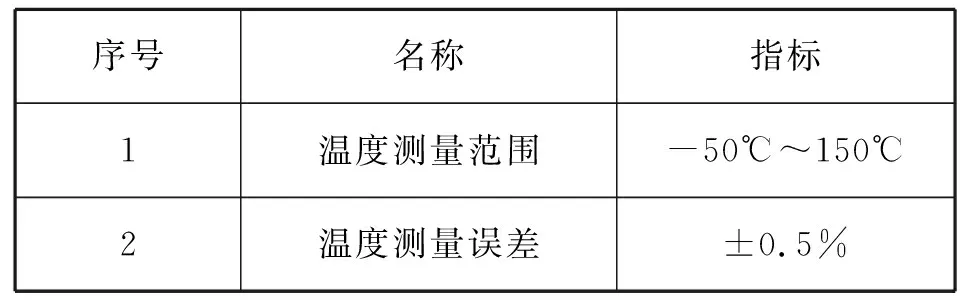
表1 温度巡检仪主要技术指标
2.6 数据采集分析模块
监测系统在Visual C++ 6.0版本下开发实现。由于Visual C++拥有一个数据量大、功能齐全的MFC库,该库实现了对绝大多数Windows API的封装。研发人员在Visua1 C++中既可以使用MFC完成绝大多数的编译工作,同时也可以随时调用windows API函数来完成深层次的开发[5]。除此之外,Visual C++在数据访问、向导和Internet支持等方面增加了许多新功能,这些功能可以用来开发在Windows环境下的数据采集功能强大、图形界面丰富的各类应用软件系统。
监测系统工业计算机对高精度光电自准直仪的实时数据进行采集和存储,并且通过经纬仪的串口通讯每隔30min对采集的高精度自准直仪数据进行修正。
温度巡检仪通过串口通讯接入工业计算机,完成监测系统对于飞行器各个位置的温度变化的监测,并与高精度光电自准直仪的数据同步采集,用来实现不同物理量的多维分析。
监测系统数据采集频率设置为1Hz,可以完成11小时不间断长时间的多维度数据采集,并将数据存储在工业计算机硬盘中,长时间监测试验结束后,可以根据采集数据完成数据分析。
3 采集数据处理分析
某飞行器长时间热待机状态姿态监测从下午14:26到第二天00:26之间进行,本时间段温度变化较大,过程中全程记录飞行器方位姿态、飞行器各处的温度变化数据。
为尽量减小日照、风等野外环境对高精度光电自准直仪和经纬仪的精度影响,高精度光电自准直仪和经纬仪等测角设备被安置在遮阳、避风的帐篷或者车间内。
监测系统采集的数据采用Origin 8.0软件进行数据分析和函数回归拟合,Origin 8.0提供了强大的线性回归和函数拟合功能,其中最有代表性的是线性回归和非线性最小平方拟合[6]。常用领域是数据分析以及绘图数据分析包括数据的排序、调整、计算、统计、频谱变换、曲线拟合等,本次试验的数据处理采用最小二乘法线性回归拟合。
如图5所示,根据温度巡检仪的实时监测, 12日下午14时26分至13日0时26分飞行器表面各部分温度由30℃逐渐减低至-5℃,18时之间降温幅度较大,之后变化平缓。
由于监测系统采集数据量较大、测试环境恶劣,本论文数据处理采用Savitzky-Golay光滑滤波,并设置平滑数据点为1000。

图5 飞行器各部位温度-时间变化图Fig.5 Temperature-time variation curve of each part of the aircraft′s azimuth gesture

(a) 飞行器方位姿态和表面平均温度-时间变化图(a) Aircraft′s azimuth gesture and average temperature variation with time

(b) 飞行器方位姿态和飞行器首尾表面温差-时间变化图(b) Aircraft′s azimuth gesture and temperature difference between the head and tail of aircraft variation with time
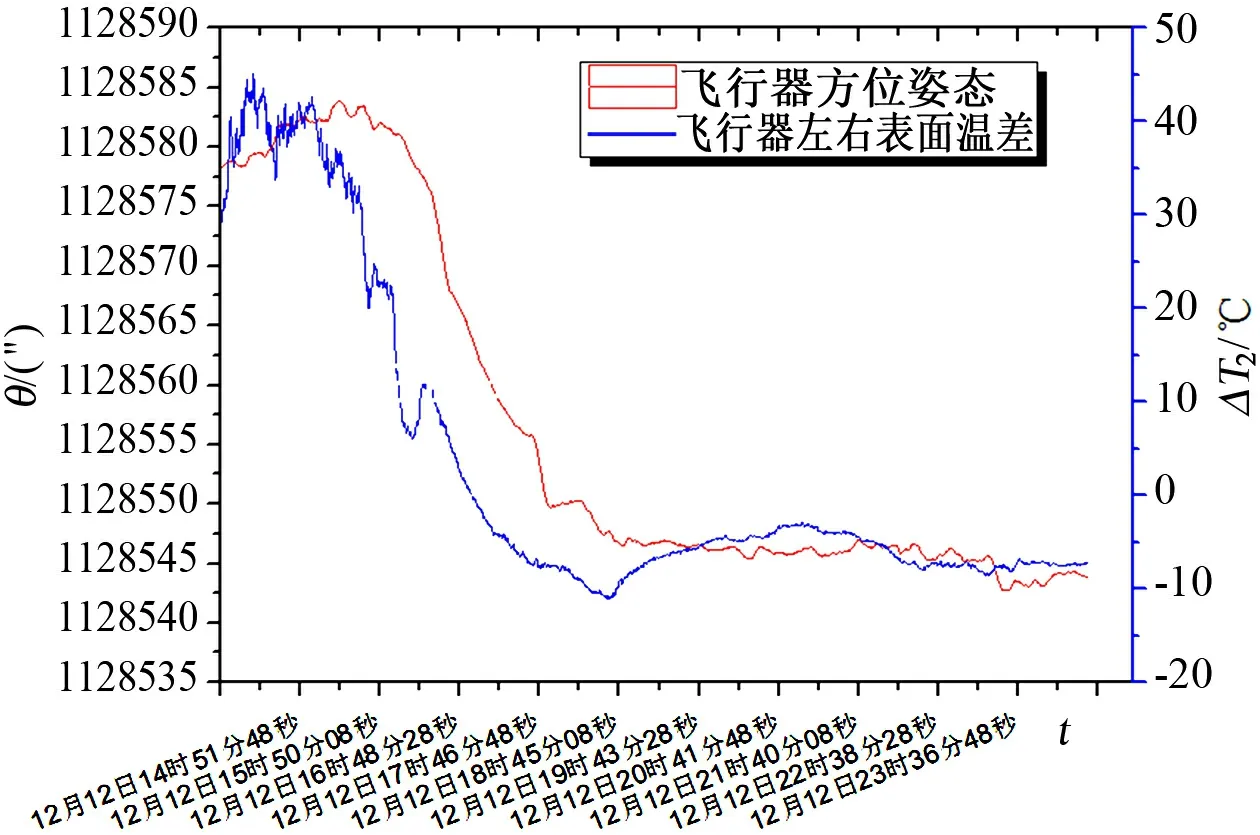
(c) 飞行器方位姿态和飞行器左右表面温差-时间变化图(c) Aircraft′s azimuth gesture and temperature difference between the left and right variation with time
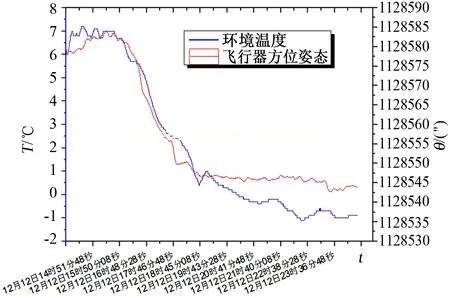
(d) 飞行器方位姿态和环境温度-时间变化图(d) Aircraft′s azimuth gesture and environmental temperature variation with time
由图6可以看出,在长时间的野外实时监测过程中,飞行器方位姿态角随表面平均温度、首尾表面温差、左右表面温差以及环境温度有明显的线性相关关系。

(a) 飞行器方位姿态-表面平均温度拟合图(a) Regression fitting of aircraft′s azimuth gesture for average temperature
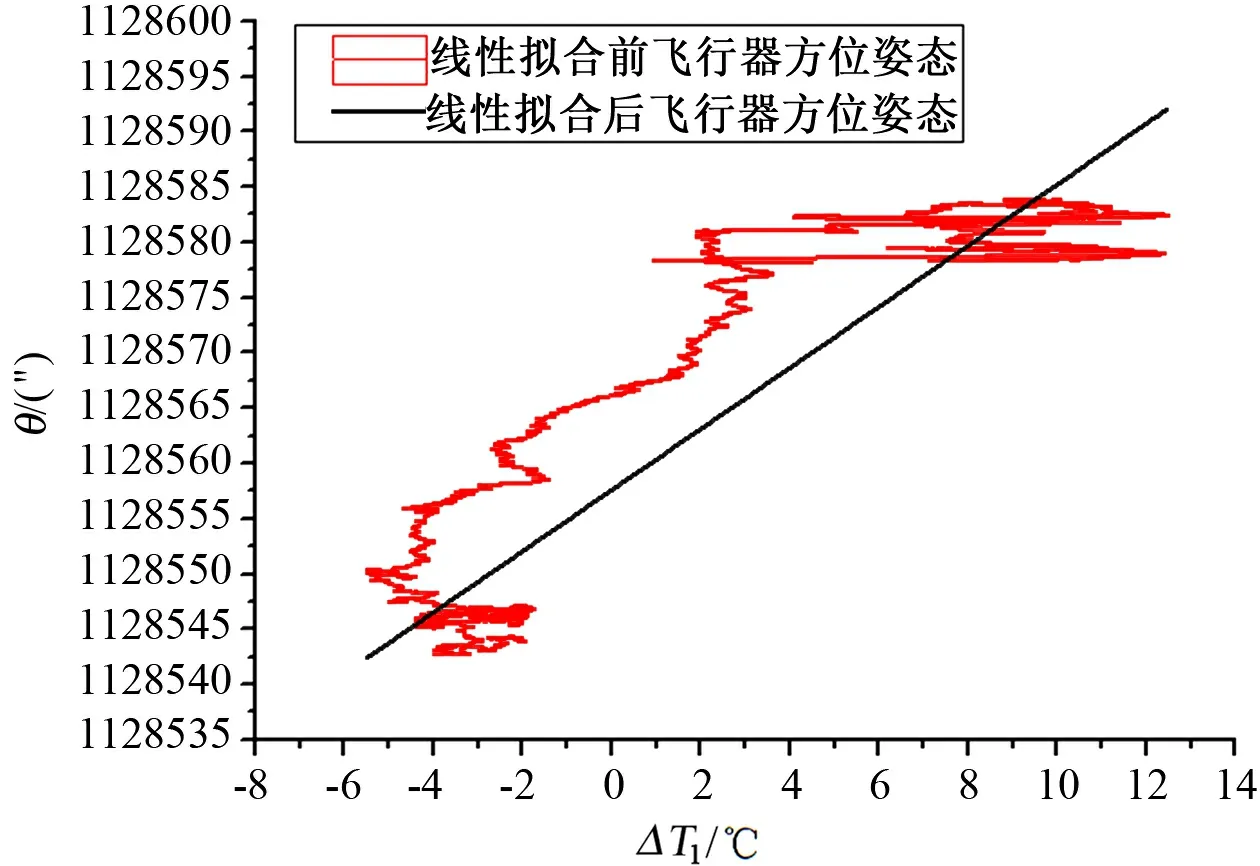
(b) 飞行器方位姿态-飞行器首尾表面温差拟合图(b) Regression fitting of aircraft′s azimuth gesture for temperature difference between the head and tail
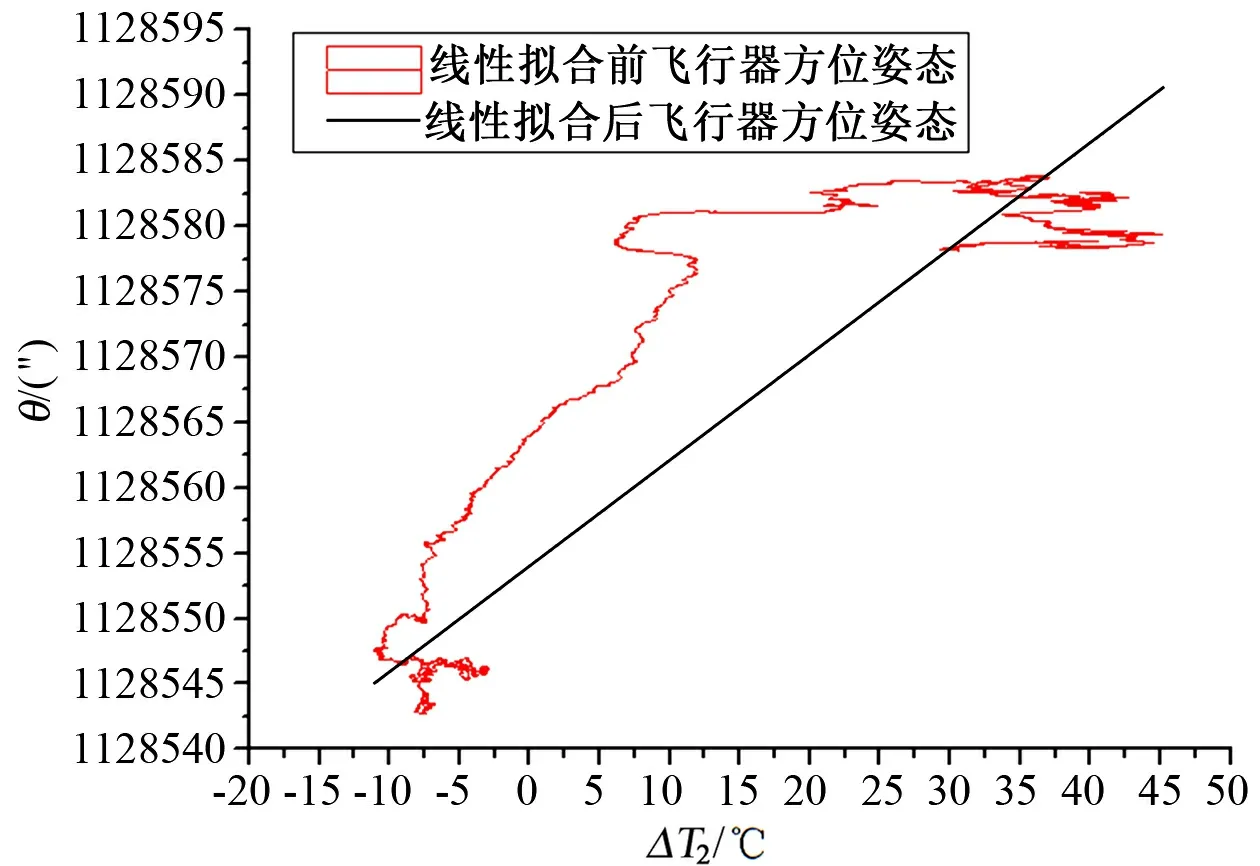
(c) 飞行器方位姿态-飞行器左右表面温差拟合图(c) Regression fitting of aircraft′s azimuth gesture for temperature difference between the left and right

(d) 飞行器方位姿态-环境温度拟合图(d) Regression fitting of aircraft′s azimuth gesture for environmental temperature
由图7可以看出,通过对飞行器方位姿态变化与四种温度参数进行线性拟合,野外飞行器方位姿态长时间变化与表面平均温度和环境温度最具有线性相关关系。

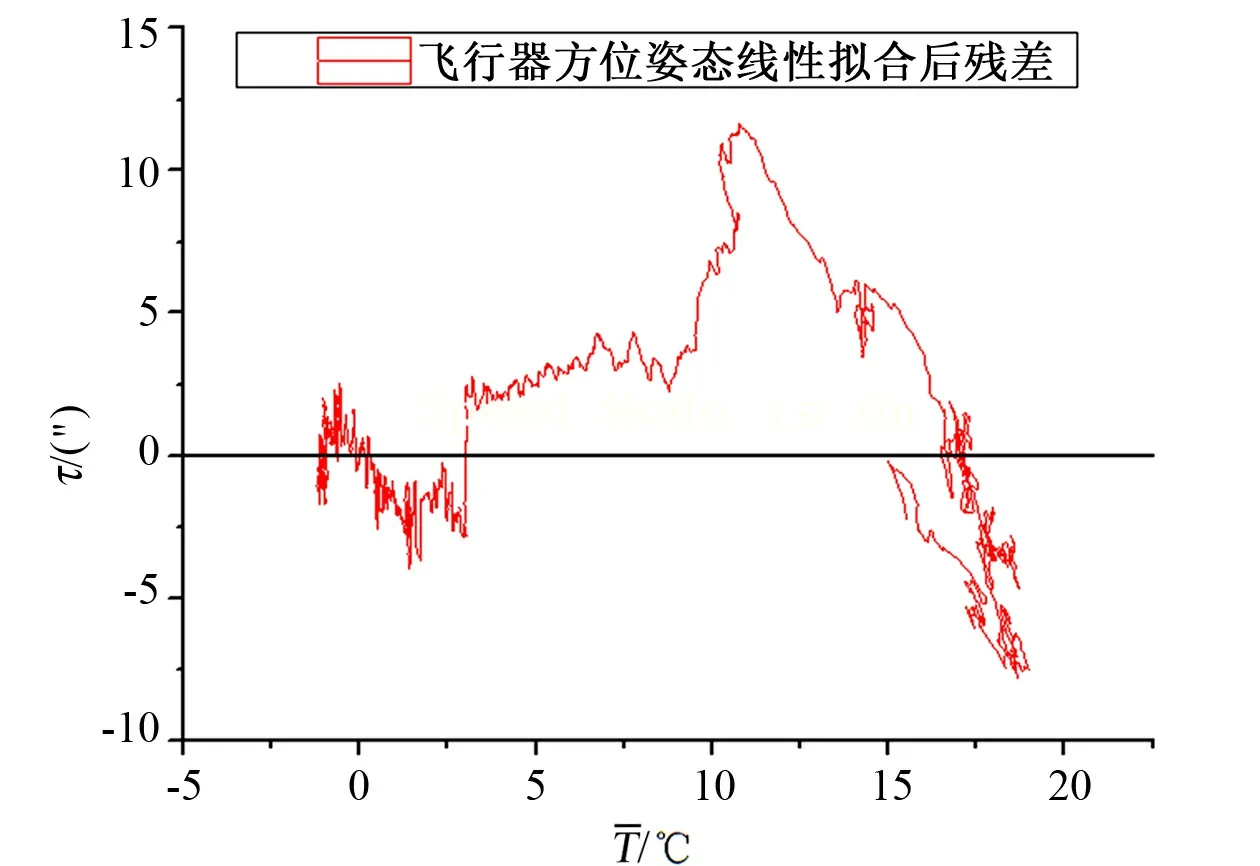
(a) 飞行器方位姿态-平均温度拟合残差图(a) Residual graph aircraft′s azimuth gesture with average temperature
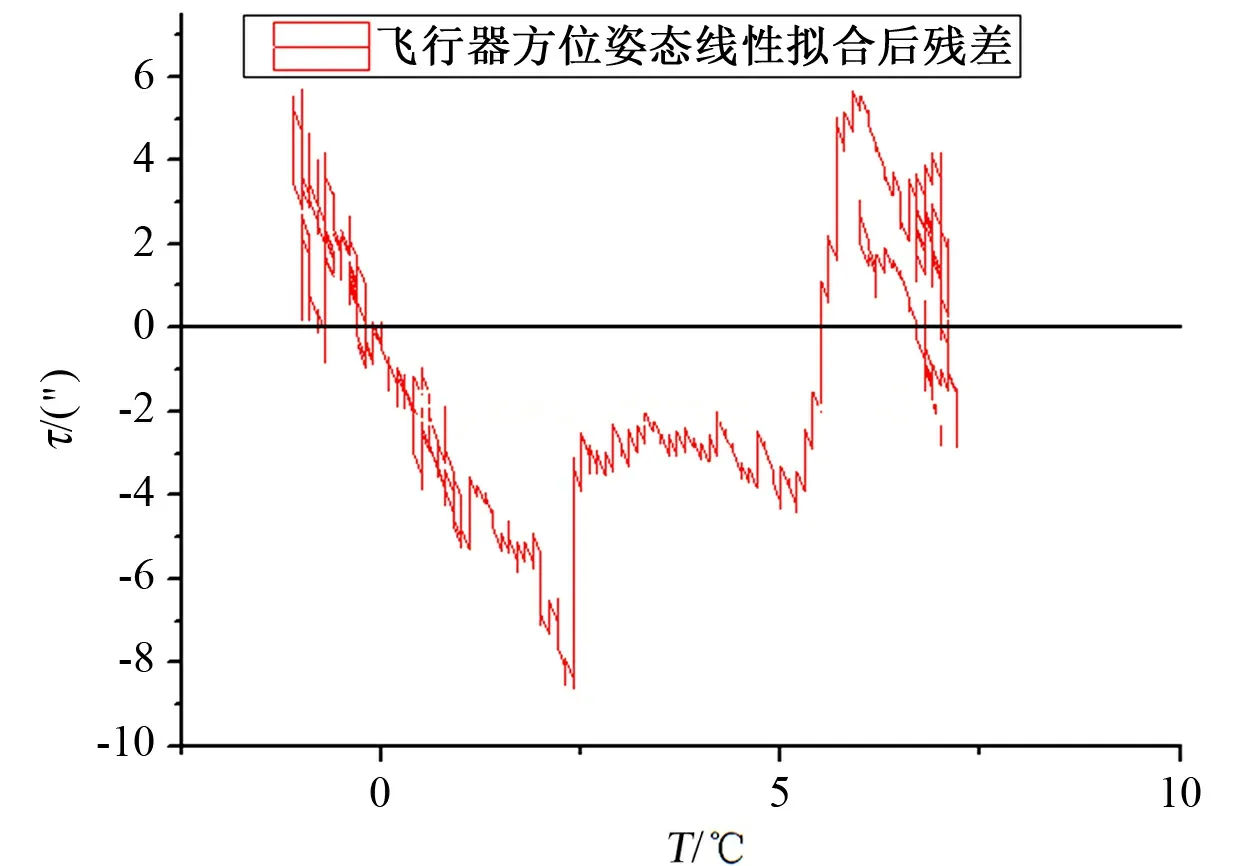
(b) 飞行器方位姿态-环境温度拟合残差图(b) Residual graph aircraft′s azimuth gesture with environmental temperature
4 结束语
本论文采用先进的测角方法和测角设备,对飞行器在野外长时间热待机状态方位姿态的变化随温度变化的规律进行监测和数据分析,并得出了得出野外飞行器方位姿态长时间蠕变的初步结论。该方法和结论可以广泛应用于类似飞行器方位姿态变化的测量工作,对于航天及航空工业的发展具有重要的作用。
