1m口径微晶玻璃主镜的单芯轴支撑方法研究
2018-08-28曹清政韩光宇薛向尧
曹清政 ,韩光宇 ,薛向尧
1 引言
光电经纬仪是涉及机械、光学、电子、伺服控制、信息和计算机技术综合性光学测量设备,是现代军事高度发展的象征,其主镜位于仪器水平轴中心,主要作用是反射会聚光线、缩小光束,使次镜光学系统尺寸重量减少[1]。经纬仪主镜作为接受信息的首要环节,其对信息接受转化的正确率是经纬仪接受信息准确性的基础,故主镜的成像质量非常重要,是第一光学系统的关键部件。决定主反射镜成像质量主要因素有主反射镜的本身性质、结构形式、制造质量、安装方式、安装质量及所受载荷等因素[2]。
随着对深空探索的需求越来越大,人们对主镜口径要求越来越大,大口径主镜自身重量(例如,1000mm口径微晶玻璃球面主镜质量可达300kg)就带来了很多工程应用问题,其中最主要的问题就是大口径主镜在重力作用下自身变形问题。为了解决这个问题,发展出了主动光学和自适应光学技术来避免这些问题,但是对于1m口径主镜主动光学和自适应光学不宜采用[3]。对于1m及其以下口径的主镜,人们多采用复杂的支撑方式来解决这些问题:如底支撑技术,侧支撑技术,前压紧技术,芯轴定位技术,防转技术,桁架结构,和轻量化技术[4]。实际工程中人们将这些技术结合起来才能获得良好的面形。文献[5]对650mm口径微晶玻璃主镜进行了轻量化,轻量化率达到59.39%。轻量化后运用侧支撑和底支撑,有限元分析后得到其面形精度能够达到RMS=5.3nm。文献[6]发现1000mm主镜在轴向18点浮动支撑、径向3点柔性支撑的情况下,主镜能够达到较高的面形精度。但是这些组合的装配技术之间的组合增多了装调过程中的变量的数目,使得主镜装调周期较长。
2 指标要求
根据光电经纬仪的生产能力和具体使用要求及现实工程实现手段主要限制条件,制定如下指标要求:(1)主镜材料选用热膨胀系数几乎为零的微晶玻璃;(2)设计主镜在单芯轴支撑前提下面形精度能达到12.66nm(λ/50);(3)要求设计主镜符合现当下生产能力,具有可生产性。
3 支撑方法分析
主镜支撑系统主要由轴向支撑和径向支撑两部分组成,其中轴向支撑主要为光轴在某一角度下的主镜提供光轴方向的支持力,径向支撑为其提供垂直于光轴方向的支持力。传统支撑方式一般由底支撑和侧支撑组合的支撑方式。底支撑多采用18点的Hindle结构支撑[7],如图1所示。该种结构是由支撑垫、万象球头、支撑杆和无定向三角板组成,从弹塑性力学角度分析,该结构是一种超静定支撑结构[8]。而这种超静定的性质决定该种支撑方法在装调过程中不可控因素较多,装调时间较长。侧支撑一般选用静定杠杆支撑,该种方法是指选择特定位置,利用杠杆结构提供主镜在光轴非竖直境况下所需的支持力。这种方法最大的弊端就是,主镜质量较大时,杠杆配重点较多,配重过程复杂,也会在很大程度上增加装调时间。单芯轴支撑是指主镜和镜筒之间用适当粘合剂粘合,镜筒为主镜提供全部的径向支持力和轴向支持力,为获得良好面形还需要对主镜进行适当的轻量化,该方法的优点是能够摆脱传统安装方法的繁琐的过程,并且能取得良好的面形精度,主要难点是主镜在轻量化后本身结构能否保证各个状态下的主镜面形精度。该方法已经在350mm口径微晶玻璃主镜上试验成功获得预期良好面形精度并且投入实际工程应用。如果能将这种方法应用到1000mm口径的主镜上,将会克服现有安装方法装调时间较长的缺点。现探索单芯轴支撑方法在1000mm口径微晶玻璃主镜轻量化结构及应用可能性。

图1 Hindle支撑结构示意图Fig.1 Structural Diagram of Hindle Support Method
4 单芯轴支撑结构
主镜支撑结构示意图,如图2所示。
其中芯轴与主镜之间选用环氧树脂粘合,芯轴和底板之间用螺钉连接,配重块和底板之间用螺钉连接。强度校核由胶粘剪切强度式(1)可得。τ=P/B*L (1)
式中:τ—拉伸剪切强度(MPa);P—剪切破坏时的最高负荷(MN);B—胶接面的宽度(m);L—胶接面的长度(m)[9]。
在单芯轴支撑的前提下,如式(1)所示。主镜与芯轴接触面积与拉伸剪切强度和剪切破坏时的最高负荷有关,剪切破坏时的最高负荷即主镜光轴垂直或水平时支持力全部由芯轴提供,数值等于主镜重力,取2kN(100%安全裕度),τ为9.8MPa[9];计算得到胶结面积最小值为(B*L)min=2.04x10-4m2。

图2 单芯轴主镜支撑示意图Fig.2 Structural Diagram of Primary Mirror only with Axis Support
5 主镜轻量化设计
采用三维建模软件UG进行快速建模,然后运用Patran和Nastran对主镜进行有限元静力分析后得出的镜面位移数据,再用Matlab处理数据得到主镜最终镜面面形精度,并针对得出的变形云图进行判断,确定优化方向。主要的轻量化方案主要内容是探索镜面厚度、加强筋厚度、加强筋厚度为变量时的镜面精度,以求获得轻量化率和面形精度都符合预期的主镜结构。主镜结构加强筋的背部示意图,如图3所示。
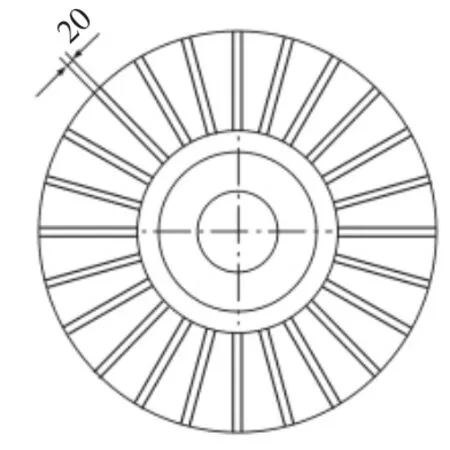
图3 加强筋结构示意图Fig.3 Diagram of Primary Mirror with Equal Thickness Ribs
5.1 加强筋厚度与面形精度的关系
根据工程实际应用,选定加强筋个数为18,镜面厚度17.5mm,变量X为加强筋厚度,步长h=2mm,目标函数f(X)=RMS(X)。静力有限元分析结果,如表1、图4所示。根据静力有限元分析结果显示,加强筋厚度与主镜面形精度之间呈正相关的关系,光轴水平时面形精度RMSH变化范围较小,受加强筋厚度变化影响较小,加强筋厚度对光轴竖直时面形精度RMSV影响较大。可以得出结论:随着加强筋厚度变大,镜面面形精度随之变小,镜面面形越好。

图4 加强筋厚度与面形精度的关系Fig.4 The Relationship Between the Thickness of Strengthening Ribs and RMS

表1 加强筋厚度与面形精度的关系Tab.1 The Relationship Between the Thickness of Strengthening Ribs and RMS
5.2 镜面壁厚与镜面面形精度的关系
选定加强筋厚度为34mm,加强筋个数为18,变量X为镜面厚度,步长a=0.5mm,目标函数f(X)=RMS(X)。关系,如表2、图5所示。从表2及图5可以看出,镜面厚度在(15~20)mm之间时,随着镜面厚度的增加,面形精度RMS不断减小,RMSV、RMSH变化趋势类似其与加强筋厚度之间的关系。其中镜面厚度为18mm时,RMSH=10.28nm、RMSV=9.61nm,满足面形精度要求,轻量化率为31%。
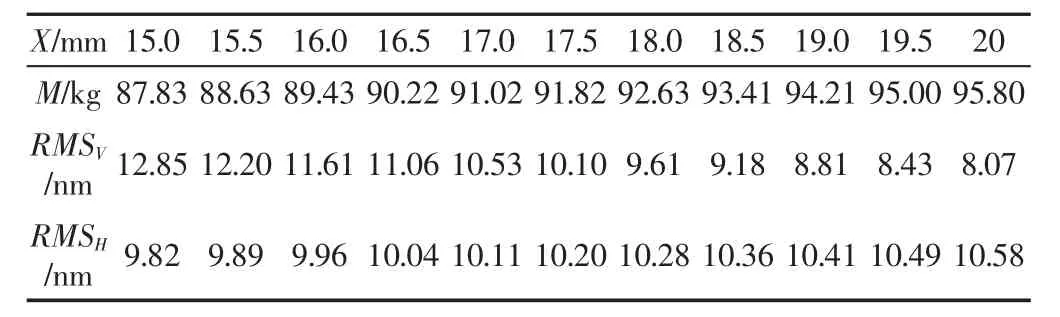
表2 镜面壁厚与面形精度的关系Tab.2 The Relationship Between the Thickness of Mirror and RMS

图5 镜面厚度与面形精度之间的关系Fig.5 The Relationship Between the Thickness of Mirror Plane and RMS
5.3 加强筋个数与镜面面形精度之间的关系
考虑到加强筋个数对主镜质量影响较大,本组有限元分析采用控制质量恒定前提下同时加强筋个数和加强筋厚度的方法来研究两者之间的关系。控制变量M=85kg,自变量X为加强筋个数,步长为h=2,目标函数f(X)=RMS(X),镜面厚度取T加强筋=17mm。

有限元分析后结果,如表3、图6所示。根据第五组静力有限元分析结果显示,在24个加强筋的情况下(T加强筋=19.00mm)主镜镜面任意两个加强筋之间的镜面变形量非常小,即密集的加强筋增强了加强筋之间镜面的抗重力变形能力,在密集加强筋支托的前提下主镜镜面可以取更小的值来完成轻量化。在此基础上,将镜面厚度T减为10mm后主镜质量为75.85kg,轻量化率为26%,有限元分析后光轴竖直情况下镜面精度RMS=6.24nm(λ/101),光轴水平时镜面面形精度为RMS=11.25nm(λ/56),满足预期要求。得到主镜具体结构,如图7所示。

表3 加强筋个数与面形精度之间的关系Tab.3 The Relationship Between the Number of Strengthening Ribs and RMS
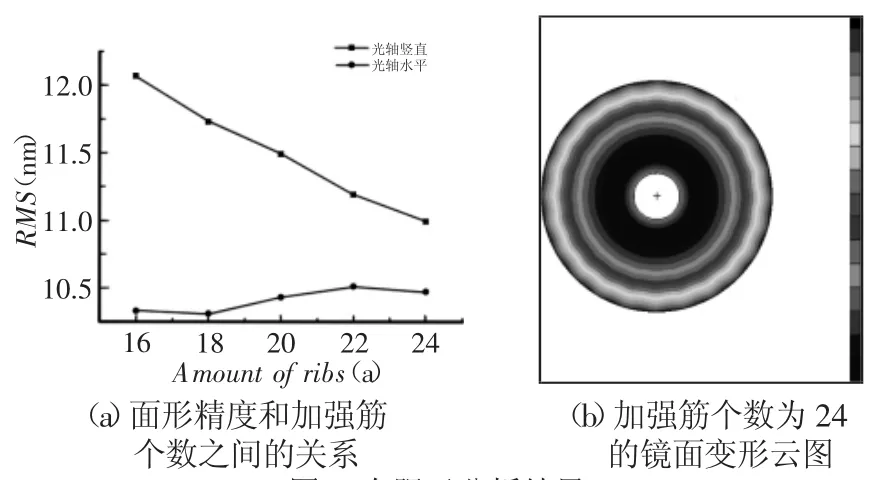
图6 有限元分析结果Fig.6 Result of FEM Analysis

图7 主镜结构示意图Fig.7 The Final Structural of the Primary Mirror
6 结论
通过对各种支撑结构分析,提出了一种新形式的只通过单芯轴支撑的主镜支撑结构,该支撑结构能简化主镜装调程序,缩短中口径光学设备的装调时间。为使这种新形式获得期待的良好面形精度,采用对主镜的轻量化的方法,利用三维建模软件UG建模,Patran进行静力有限元分析后得出面形精度RMS,不断优化修改镜体的镜面厚度、加强筋个数、加强筋厚度后,得到了符合要求的主镜形状。经过大量的轻量化分析后,得到轻量化率为26.0%的主镜结构,静力有限元分析后得其面形精度:光轴竖直时RMS=6.24nm(λ/101),光轴水平时镜面面形精度为RMS=11.25nm(λ/56)。最终结构主镜静力有限元分析结果证明单芯轴支撑方法可行。