微型仿生扑翼机控制器设计
2018-08-25贺雪晨周超英汪超
贺雪晨,周超英,汪超
(哈尔滨工业大学深圳研究生院机电工程及自动化学院,广东深圳518055)
仿生扑翼飞行器是一种模仿鸟类或昆虫飞行方式的新型仿生飞行器[1]。与采用传统飞行方式的飞行器相比,仿生扑翼飞行器具有体积小、重量轻、隐蔽性好和灵活性高等优点[2],特别是在小尺度、低雷诺数条件下,相较于其他气动布局的飞行器有着难以比拟的优势,在民用和军事领域均有广泛的应用前景。因此,近几十年来仿生扑翼飞行器的发展十分迅速,国内外的科研工作者对这一领域的研究也十分重视。
随着扑翼飞行器的小型化,势必要求其控制器做到尽量微型化。文中设计一款微型控制器,并可解算出扑翼机的姿态角,采用PD控制器控制尾翼舵机,使扑翼机具有良好的飞行稳定性,满足微型扑翼机的控制要求。
1 硬件设计部分
1.1 总体方案
微型扑翼控制器可利用各传感器的数据解算出扑翼机的当前姿态,并解析接收机信号得到控制量,控制执行机构。主要由以下几个部分组成:
1)微处理器:扑翼控制器的核心单元,用来解算姿态角、解析遥控信号、控制执行机构;
2)姿态传感器:包含加速度计、磁力计和陀螺仪,提供姿态解算的原始数据;
3)通讯模块:遥控器通过接收机与控制器进行信息通信。
1.2 电路设计
MPU6050集成了加速度计和陀螺仪两个传感器,磁力计则选用HMC5883L,气压计BMP180作为拓展功能,三个传感器均采用I2C总线与微处理器进行数据传送。

图1 控制器框图
微处理器的SCL和SDA与MPU6050的I2C接口相连,而MPU6050的AUX_CL和AUX_DA直接连接磁力计HMC5883L,此时可将MPU6050的AUX接口设置成直连式,微处理器便可直接访问HMC5883L,两个传感器共同组成9轴传感器,BMP180也可以通过I2C总线直接与微处理器相连。姿态传感器电路如图2所示。
图3为文中所设计的控制器:

图2 姿态传感器电路图
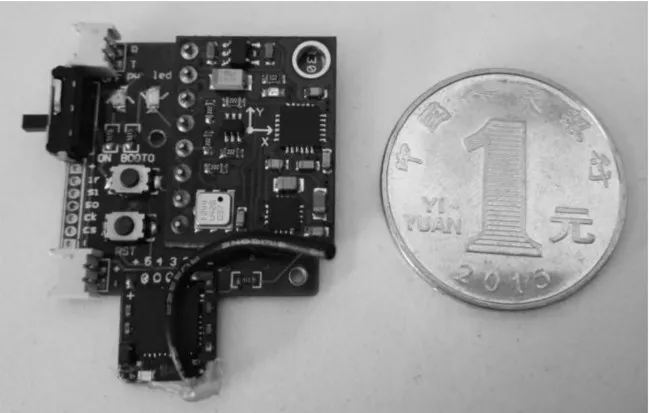
图3 控制器
2 软件设计部分
在上述已完成的硬件基础上进行软件设计,软件的主要功能为:将接收到的遥控数据解析为电机控制量和目标姿态角,其中电机控制量直接转换成对应占空比的PWM信号输出给电机驱动模块,读取各传感器的数据并进行姿态解算,得到飞行器当前的姿态数据,将实际姿态角与目标姿态角的差值输入给PD控制器,最终得到调节后的控制量来控制尾翼舵机。框图如图4所示。

图4 软件设计框图
2.1 姿态解算
由于飞行器飞行高度低,飞行速度小,可忽略地球自转等因素的影响[3]。在空间内仅定义两个不同的坐标系,分别为以载体旋转中心为原点的参考坐标系OnOn和以飞行器载体中心为原点的机体坐标系Ob。
飞行器在参考坐标系中的姿态一般用俯仰角θ、偏航角ψ、滚转角ϕ来表示。本文的计算过程采用四元数算法,各轴角的表示采用欧拉角。在计算过程中利用修正漂移后的角速度求出四元数,将四元数转换成方向余弦矩阵中的某几个元素,再利用方向余弦矩阵与欧拉角的数学关系计算出姿态角,从而实现姿态解算。
参考坐标系和机体坐标系之间的旋转可用方向余弦矩阵表示,其欧拉角表示方法为:

绕空间任意轴旋转的方向余弦矩阵的四元数表示方法为:

对比式(1)和式(2)的相应元素可得:

陀螺仪由于本身精度问题,测得的角速度存在一定误差,在积分过程中这个误差会一直累加,而加速度计和磁力计的长期测量值是准确的,因此可用加速度计和磁力计对陀螺仪做补偿修正。姿态模块共输出9个数据:三轴角速度、三轴加速度、三轴磁场强度,以这9个数据作为姿态解算的输入值,可算出方向余弦矩阵,从而根据式(3)求解出θ、ψ、ϕ。整个解算流程如图5所示。
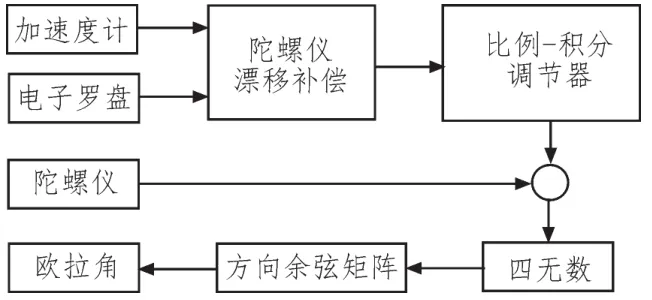
图5 姿态解算流程图
根据加速度计的测量值,求解出姿态误差向量ea:

其中gb为加速度计的实际测量方向,gn为n系中的重力方向,和分别为在b系中加速度计测量出的重力方向和陀螺仪计算出的重力方向,则:

根据磁力计的测量值,求解出姿态误差向量em:
记磁力计实际测量出的地磁力方向为mb,经过(加速度计矫正后的旋转矩阵)旋转之后得到mn。已知地磁力在Oxy(n系)平面内的向量大小相等,而沿z轴方向上分量大小不改变。处理之后的mn经过旋转回到b系中得到Lb,再与mb做向量积求得误差向量em。

则姿态误差向量e:

当偏差角度很小时,陀螺仪的角速度误差与加速度计和磁力计求得的误差成正比,因而可用求得的误差修正陀螺仪偏差,设修正后的角速度为w,则:

利用一阶龙格-库塔法(Runge-Kutta)更新四元数q,并将四元数单位化,设单位化后的四元数为,则:

将代入式(3)即可得姿态角θ、ψ、ϕ。
2.2 PD控制器
俯仰和滚转是扑翼机中最基本、最重要的控制,能够保持扑翼机的飞行稳定性。扑翼机通过尾翼的上下摆动和沿机体轴的转动来调节尾翼与来流方向的夹角,从而改变尾翼上产生的气动力对机体中心的力矩大小。
俯仰角对保持扑翼机的稳定飞行起着至关重要的作用。俯仰角速度q的引入,增大了扑翼机纵向短周期运动的阻尼,改善纵向通道的阻尼特性。纵向通道控制框图如图6所示。
秦安栽培的花椒品种主要有大红袍、油椒、豆椒、“秦安一号”等。由于品种更新缓慢,花椒种质资源相对老化,花椒品质已不能适应市场需求。许多椒园濒临衰老退化,树势衰弱,产量低,果实色泽暗淡,花椒质量差,枝条容易枯死,普遍存在病虫害严重,椒树寿命不长,椒园经济效益不高等。因此,老椒园的改造也是亟待解决的问题之一。

图6 俯仰角控制框图
俯仰角闭环控制律如式(10):

式中θd为目标俯仰角,θ为实际俯仰角,Kθ和Kq分别为比例调节系数和微分调节系数。
与俯仰角的姿态控制不同的是,为保持扑翼机的平稳飞行,应使目标滚转角ϕd等于零,引入滚转角速度p增大扑翼机的滚转阻尼,滚转角的姿态控制亦采用PD控制器,其控制框图如图7所示。
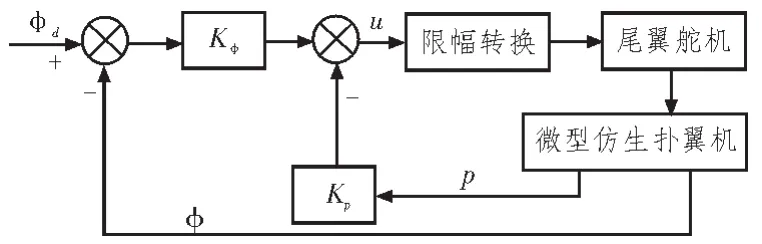
图7 滚转角控制框图
滚转角闭环控制律如式(11):

式中目标滚转角ϕd为0,ϕ为实际滚转角,Kϕ和Kp分别为比例调节系数和微分调节系数。
3 装配及试飞
文中所设计的微型扑翼控制器的质量仅为4.09 g,整体尺寸为27 mm*27 mm*2 mm,可将其装配在微型扑翼飞行样机上,如图8所示。

图8 装配在扑翼机上的控制器
控制器可根据遥控器摇杆量的大小直接控制直流电机的转速,从而控制扑翼机的扑动频率。当扑翼机的滚转角不为0时。由于滚转姿态的自动调节作用,尾翼会沿机体轴向机体滚转方向同向转动,在气动力的作用下,产生与滚转方向相反的滚转力矩,从而调节滚转姿态。
实际飞行过程中,扑翼飞行样机可连续飞行15~20 s,实验试飞效果良好。图9为飞行中的扑翼机。
4 结束语
文中设计了一款微型扑翼机控制器,采用STM32为主处理器,并设有陀螺仪、加速度计和磁力计,设计制作了控制器的硬件部分。在此基础上进行软件设计,解析遥控器信号得到直流电机的控制量和目标姿态角,采用基于四元数互补滤波的姿态解算方法求解扑翼机的姿态角。俯仰和滚转姿态采用比例微分控制器,计算出舵机控制量,以保持扑翼机的飞行稳定性。
该控制器具有质量轻、尺寸小、与扑翼机契合度高的优点,但目前采用的控制算法较为简单,只能实现手动地遥控飞行,今后还需对控制算法进行深入研究,以达到更好的控制效果。