基于蓝牙4.0的人体上肢运动姿态采集及识别系统研究
2018-08-25韦俊
韦俊
(西安交通大学城市学院,陕西西安710000)
长期以往,人们对于人体自身生命的现象研究并没有停止,其中的研究重点就是人体自身运动研究分析和解释。人体运动任曦主要指的是利用某种方式实现人体运动姿态的检测及追踪,从而得到人体运动过程中的多种运动参数,以此全面描述并且解释人体运动。在人们的对此方面进行深入研究的过程中,其也逐渐成为了一门全新的学科,就是人体运动生物力学[1]。此门学科主要是利用人体运动解剖的生理特点,创建人体某部位的模型,使用多种测试手段对人体在运动过程中的速度、位移、加速度、力等运动方式进行测量及分析,以此得到和人体相关的信息。运动姿态识别指的是对指定区域中字条变化的识别,对物体运动过程中的幅度急性检测,一般利用仪器仪表定量化数值实现描述[2]。文中设计的基于蓝牙4.0的人体运动姿态收集和识别系统是以加速度传感器为基础进行设计,其功耗较低,并且尺寸较小,价格成本理想,能够利用主控及收集芯片实现运动人员上肢信息的收集,利用对加速度传感器收集进行数据分析,识别运动人员上肢姿态的动作。
1 人体运动姿态的识别研究
在模式识别领域不断发展的过程中,传感器也在不断的朝着微型化及智能化的方向发展,以加速度传感器为基础的人体运动姿态时识别研究不断重视,部分研究人员实现图像识别及语言识别等技术进行改进,使其以加速度为基础[3],图1为人体运动姿态识别的过程。
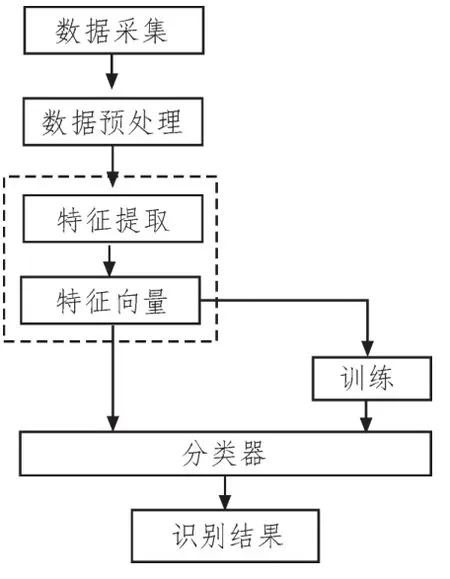
图1 人体运动姿态识别的过程
通过图1可以看出来,人体运动姿态的识别过程为:首先利用数据收集的得到相关行为加速度的信号,之后对于这些信号进行去燥、平滑及校正等数据预处理的操作,以此得到更加优质的数据,为特征的提取打下良好的基础[4]。对于通过预处理加速度的数据实现物理特征和意义的分析,之后实现特征的提取,最后根据识别算法和实际需求收集全部或者某部分特点创建特征向量,最后将分类器作为姿态识别的主要部分,利用相应的训练过程中对人体状态识别有效分类模型进行创建[5]。
2 运动姿态收集及识别系统的设计
2.1 运动姿态收集和识别系统
运动姿态收集和识别系统主要包括多个模块构成,比如姿态检测单元、数据收集单元、数据处理单元、通信模块等,此系统已经是以现代加速度传感器及惯性测量技术为基础,实现人体运动姿态信息收集和计算,从而得出输出结果。利用运动姿态检测系统实现人体运动姿态数据的收集之后处理,并且将其到计算机中传输,从而实现之后的处理和姿态运动[6]。图2为运动姿态收集和识别系统的基本构成。
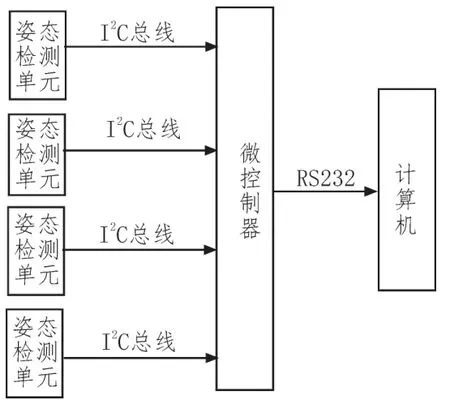
图2 运动姿态收集和识别系统的基本构成
2.2 姿态检测模块
姿态检测属于运动姿态收集和识别系统功能中的主要组成部分,本文所设计的姿态检测单元使用三轴磁阻传感器,将传感器检测载体坐标系各个轴加速度分量,通过磁阻传感器对磁场在载体坐标系统中各个轴的分量进行检测,通过信号放大电路到微处理器中输送[7]。图3为姿态检测单元的结构。
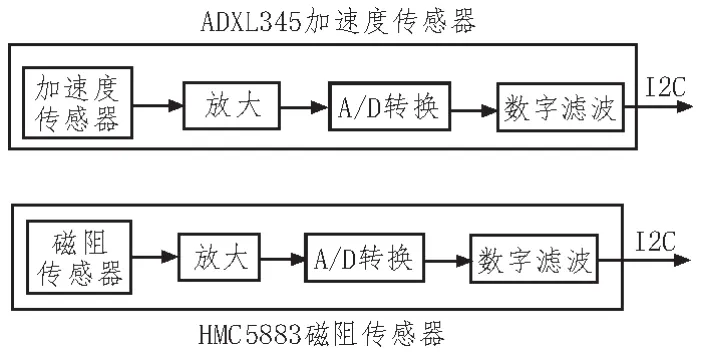
图3 姿态检测单元的结构
姿态检测单元和为空气利用I2C总线实现数据的通信,比如姿态检测单元收集数据的读入及微控制器控制命令的写入,I2C总线是通过两线式串行总线,其主要目的就是连接外围设备和微控制器,其主要优势就是简单并且有效,总线长度范围较大,最高为25英尺,能够支持40个组件通过最大传输速率同时的传输,其还能够支持多主控,简单来说就是能够发送机接受的设备都能够成为主总线[8]。
2.3 数据收集
数据收集模块属于人体运动姿态识别系统中的最底层,是得到人体运动信息的主要途径,此模块通过集成收集装置中加速度传感器得到人体运动过程中的加速度信号,并且将数据对终端进行传输,所得到加速度数据质量和识别系统性能具有密切的联系。目前,并没有标准数据收集平台,并且标准的数据集也较少,所以就要设计能够满足自身需求的收集装置[9]。图4为数据收集平台和硬件结构。
在实现数据收集器设计的过程中,一般会将加速度传感器、数据存储等模块都在收集器中集成,之后利用某种数据传输方式使收集器存储数据能够到计算机设备和其他设备中进行传输及处理。利用传输技术实现有线及无线传输的划分。在使用有线传输收集器的过程中,收集数据利用有线传输介质到计算机设备中传输,其的可靠性比较高,但是人体佩戴舒适度并不高,并且使用范围有所限制。为了能够有效提高数据稳定性及可靠性,部分研究人员将其到收集器中集成,从而能够有效避免数据传输过程种数据的错误及丢失,提高了收集器设计的复杂程度,并且对于姿态识别算法实时性提出了较高的需求[10]。
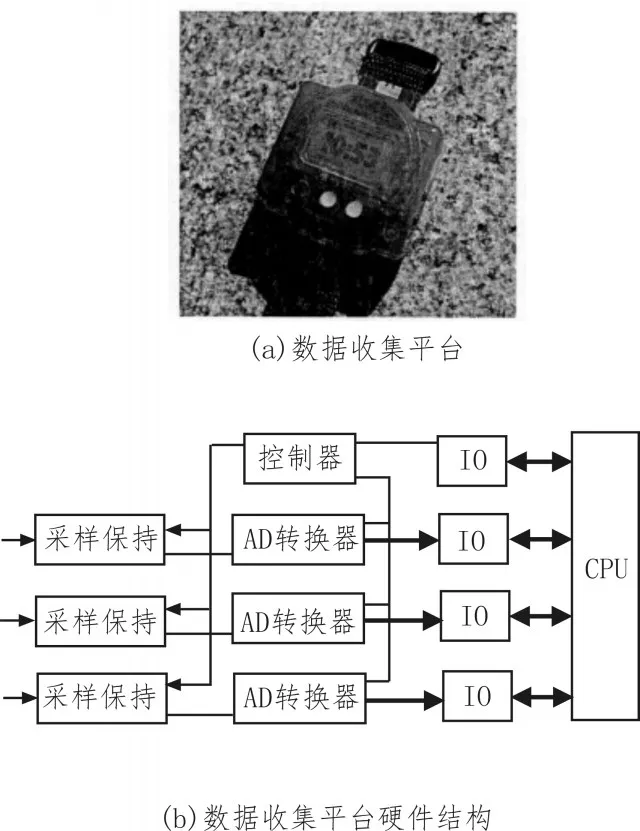
图4 数据收集平台及硬件结构
2.4 特征的收集
在收集原始加速度信号值或者利用预处理加速度信号值,虽然其能够在人体姿态识别系统中使用,但是原始的加速度辛哈之中的人体运动物理意义比较狭隘,识别率较低。在人体运动姿态识别系统中,一般都是会对原始加速度信号值实现特征选择和提取,并。目前,特征提取和选择并没有统一标准,不同系统识别行为及分类方法不同,所以使用的信号特征也不同,不同特征对于分类器识别效率的影响也会不同。一般通信信号的分析方式主要包括频域分析、时域分析、时频分析[11],表1为使用较多的特征。

表1 常使用的特征列表
3 系统的硬件电路设计
3.1 加速度传感器
可以佩戴的设备传感器的体积要小,并且成本和功耗要低,要求具有较高的灵敏度,所以可以使用微电子机械系统传感器,其能够保证数据传输过程中没有迟延,并且还能够连接磁力计,适应于穿戴设备产品中开发使用,并且其具有较高的灵敏度。综合考虑低成本、低功耗及频段开放等3方面的因素,选择数据传输的方式。通过蓝牙4.0方式实现数据传输,从而能够保证可穿戴设备在静态工作时候能够长时间使用,并且此芯片的价格比价便宜,便于量产和研究,蓝牙4.0也具有开放性的频段,所以能够实现主机及从机的数据传输[12],图5为系统硬件的构成。
3.2 姿态收集系统
姿态核心处理部分主要包括CC2451处理器作为核心创建下位机,主要包括从机与主机,从机中具有加速度收集芯片的集成。系统实现数据包的发送主要包括:
1)将主机和从机打开,保证主机和从机相互拦截;
2)上位机下法收集指令对主机进行发送,主机接收到指令之后对从机发送,以此收集数据。图6为主机的运行逻辑。
3)从机中的MPU加速度传感器收集运动过程中的三轴加速度信息和陀螺仪信息,从而得到人体上肢运动过程中的运动信息,并且从机对蓝牙传送实施数据[14]。
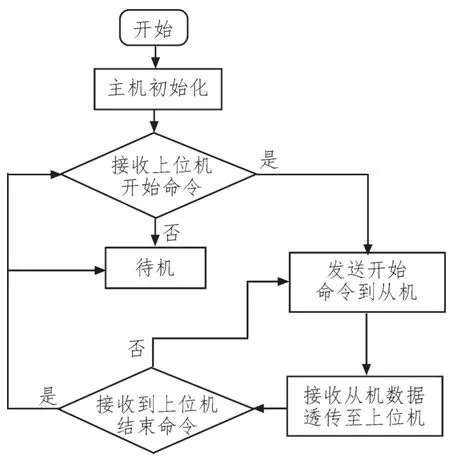
图6 主机的运行逻辑
在两帧发送完整加速度计和陀螺仪数据之后主机接受从机发送的数据,利用串口将数据到上位机中发送,从而实现数据的实时收集,并且保存数据,直到上位机实现停止命令的发送,这个时候的从机和主机都会进入到待机状态。图7为从机运行过程中的逻辑。
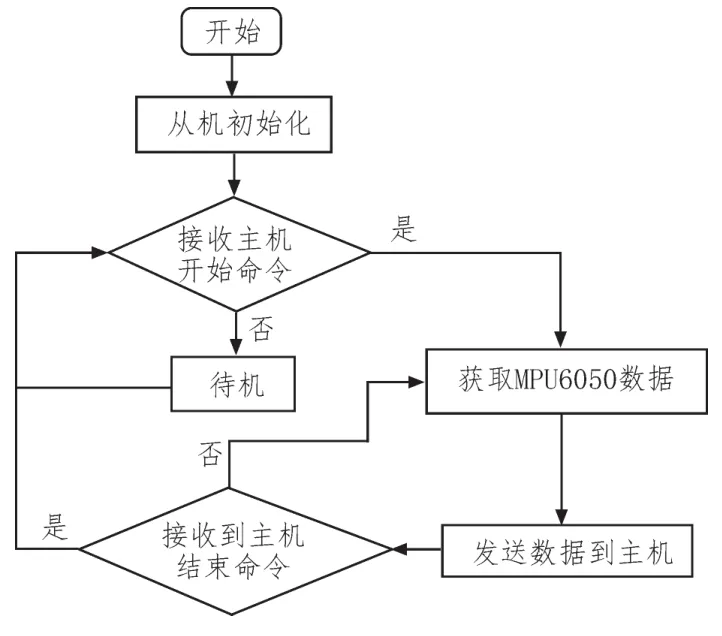
图7 从机运行逻辑图
3.3 上肢运动姿态的数据收集
在上肢运动,上肢在竖直轴、水平轴和纵轴3个方向都会具有加速度,利用SMP软件编程将加速度值转换成为角度信息,这个时候就能够收集上肢空间中俯仰角、横滚角和航偏角的信息。在人体运动的时候因为运动频率和幅度都会出现不同的变化,所以这3个方向具有一定的差别,从而就要实现人体建模,图8为人体的模型。
在进行数据收集的过程中,要在上臂相同位置中佩戴收集仪器,之后将收集的数据根据相同的模式实现数据处理,为了能够有效提高收集数据精准性,要想避免数据在收集过程中收集上肢触碰的物体,从而产生较大的加速度,图9为数据的收集界面。从机将收集的加速度和陀螺仪数据使用蓝牙方式对主机进行发送,主机在接收到数据之后利用串口发送计算机端数据,实现数据处理[15]。
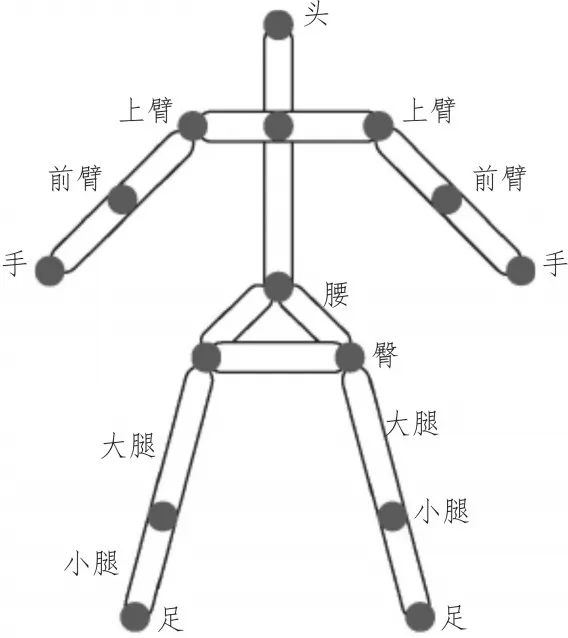
图8 人体的模型
图9 数据的收集界面
4 系统的调试和结果分析
4.1 系统的调试
在创建系统硬件和软件之后,就要设计调试方案测试系统整体的功能,本文研究系统主要包括硬件及软件的代码,其在调试过程中具有多种方法,并且也能够使用多种工具。通过系统局部及整体调试,发现系统中存在的漏洞并且完善。
在调试硬件过程中,首先创建具有VGA显示器及SDRAM工程,使其能够成为显示器缓存,之后在显示器中显示,表示能够将图像显示出来。在调试图像收集、存储和显示之后,表示硬件系统中的各个模块都能够正常的工作。
在本文系统中,软件的调试主要是利用编程实现验证,其主要目的就是查看数据是否能够正常的读取,从而保证后续的处理精准度。对图片进行水平扫描,输出灰度256色,设置最大的高度及宽度都为112,输出的类型为C语言,将图像信息文件实现编程测试,对数据正确性进行测试。由于图像处理过程中具有多种算法,所以就要使用大量测试样本实现对比分析算法,通过对比验证之后,在Nios平台中实现。在完成每部操作处理之后,对函数进行调用,以此在显示屏中显示处理的结果,从而对实时处理结果进行查看[16]。
在调试硬件及软件之后创建系统整体输入,详见图10。

图10 系统的整体实物
4.2 系统的测试
通过系统调试之后,系统摄像头能够实时的实现目标图像的收集,并且在显示器中显示收集的图像[17]。在运行之后,系统模块运行正常,没有其他异常现象,表示系统设计正确。
5 结束语
文中实现了基于蓝牙4.0的人体上肢运动姿态收集及识别系统的设计,能够利用姿态检测单元得到人体上肢运动姿态参数[18],之后利用人体上肢运动姿态系统得到运动角度及位置,表示人体上肢运动姿态变化的定量化描述。