基于超声电机的食道胶囊内窥镜光扫描机构
2018-08-25陈加林郭明森邢晓红
陈加林, 郭明森, 邢晓红
(1.南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016) (2.南京航空航天大学金城学院 南京,211156)
引 言
早期检测对于癌症等疾病的诊断和治疗意义重大,对医学观测手段提出了很高的要求。OCT技术[1]是20世纪90年代末发展起来的一种新型成像技术手段,通过测量生物组织对入射激光的回波时间延迟和后向散射光强度,对生物系统内部微观结构进行高分辨率断面层析成像,系统由低相干光源、迈克耳孙干涉仪、横向扫描机构和信号处理部分组成[2]。OCT技术具有分辨率高(1~15 μm)、有一定探测深度(2~3 mm)、非接触和无损伤等优点[3]。对比其他医学成像技术手段,OCT技术精度比超声成像高,系统体积和成本小于核磁共振及正电子发射断层成像,能对X射线成像技术能力之外的器官软组织成像,在眼科[4]、皮肤科[5]、血管[6]、牙科[7]及消化道[8]等都已有应用。
OCT技术可进行光纤化,做成细小的光学探测装置,与支气管镜、导管技术相结合,实现活体的在体成像,结合内窥镜可对消化道活体成像。麻省综合医院和哈佛医学院联合研制的牵线式远端(机械驱动机构位于体外)扫描胶囊内窥镜得到了志愿者的食道OCT图像,验证了OCT胶囊内窥镜对食道早期检测的可行性[8]。
超声电机是一种利用压电材料的逆压电效应和摩擦作用的驱动器,由定子、动子和预压力机构等组成。通常将定子设计成特定形状和尺寸,然后向粘接在定子上的压电陶瓷施加一定频率的电压,激发出定子特定的模态,从而产生高频微幅振动,通过摩擦作用驱动动子。与电磁电机相比,超声电机具有以下特点;结构简单紧凑,形状可以多样化;转矩/质量比大(是传统电机的3~10倍);低速大扭矩;无需齿轮减速机构;响应快(ms级);在闭环条件下速度和位置控制性好,分辨率高;不产生磁场,不受外界磁场干扰。由于其优异的性能,超声电机在航空航天、精密机械、武器及医疗等领域的应用越来越广泛[9]。在胶囊内窥镜中采用超声电机作为驱动机构,不仅可以简化内窥镜的光扫描机构、改善成像质量,同时在工作时不产生磁场、也不受外界磁场干扰,使其可与核磁共振成像兼容,使多模态成像(浅表组织OCT高精度光学成像结合深度组织MRI成像)在技术上具有可行性。文献[10]设计的内窥镜用于血管OCT检测,只能做环向旋转扫描[10]。笔者研究的基于超声电机的OCT胶囊内窥镜用于食道检测,其驱动机构包括一个中空轴旋转超声电机和一个直线超声电机,可实现环向和轴向两个方向的扫描。
1 胶囊及光扫描机构
胶囊内窥镜的外形尺寸受到食道大小的限制,直径以10~15 mm为宜,长度不宜超过30 mm。胶囊太大会对吞咽造成困难,增加患者痛苦;若直径太小,激光难以聚焦到食道壁,影响成像质量。应用于胶囊内窥镜的OCT技术使用的激光聚焦后光斑尺寸约为20 μm,需要同时进行环向和轴向两个方向的扫描才能实现较大面积的组织成像。若采用传统电磁电机作为作动器,只能将电机设置在胶囊末端,否则激光无法从胶囊主轴通过,此时导线会遮挡激光扫描时的光路,在成像时形成阴影[11]。采用中空轴结构的超声电机作为旋转驱动机构可以避免导线遮挡光路,较电磁电机优势明显。OCT扫描要求驱动机构能快速启停、运行速度稳定,否则会造成图像畸变,影响检测结果。超声电机响应速度快,可断电自锁,采用小尺寸的直线超声电机作为胶囊内窥镜的直线驱动机构十分合适。
胶囊内窥镜结构和加工的原型(只有驱动机构和外壳)如图1,2所示。固定在胶囊内部的压电直线电机可推动旋转电机在导轨上往一个方向滑动,导轨上的3个弹簧推动旋转电机反向运动,驱动镜头同时实现直线和旋转两种运动。光学器件的组成和安装如下:光纤准直器安装在胶囊一端的外壳上,轴线与胶囊主轴重合,安装在旋转电机空心轴上的镜头内有一块棱镜和两块平凸透镜,镜头随电机轴体一起高速转动。激光经光纤传到到准直器,准直平行光束沿胶囊轴线穿过旋转电机的空心轴,经三角棱镜偏折后垂直胶囊轴线,再经平凸透镜之后聚焦在胶囊外壳外侧的食道壁。从生物组织散射回来的光用共焦模式采集,即反射光沿入射光路径返回。由于加工条件的限制,目前笔者制造的聚碳酸酯的胶囊外壳厚为2 mm,胶囊尺寸超过最佳尺寸,采用更好的加工办法可使外壳厚度减小至0.5 mm,胶囊直径为13 mm,达到使用要求。

图1 胶囊内窥镜结构示意图(单位:mm)Fig.1 The structure of capsule endoscope (unit: mm)
图2 制备的胶囊内窥镜原型Fig.2 The fabricated prototype of capsule endoscope
2 直线电机结构
小尺寸直线超声电机主要包括惯性式压电直线电机[12],通过螺纹传动将旋转运动转化为直线运动的超声电机[13],以及利用面内模态的平板式超声电机[14]。惯性直线电机驱动力较小,预压力的控制比较复杂,不适用于胶囊内窥镜;平板式超声电机的预压力控制更加复杂。由于螺纹驱动的直线超声电机的螺纹结构具有较强的自锁能力、驱动力比较大、控制精度较高,因此采用这一类型电机作为直线驱动机构。
New Scale Technologies公司的squiggle®压电直线电机(型号SQL-RV-1.8)的结构图和照片如图3,4所示。其定子由内螺纹结构的空心金属方柱和粘接在其4个表面的压电陶瓷片组成,相对的两片陶瓷可以激发出定子的一阶弯曲模态,另外两片相对的陶瓷可以激发弯曲方向正交的一阶弯曲模态。工作时给4片陶瓷分别加上90°相位差的激励信号(激励信号相位分别为0°,90°,180°和270°),此时在定子内螺纹的质点上形成周向上的椭圆运动。电机转子是一根和定子内螺纹匹配的螺杆,在定子内螺纹质点椭圆运动的作用下可以旋进或旋出。该电机在轴向载荷质量为15 g,输入驱动电路的电压为3.3 V,速度2 mm/s以下时驱动力超过45 g。胶囊内窥镜工作时可通过牵线控制内窥镜在人体食道中的位置,在可能的病变处保持内窥镜静止,通过内部的直线驱动机构和旋转驱动机构控制激光做螺旋形的扫描。内窥镜工作时在人体食道中的姿态接近竖直,此时镜头位于旋转电机的下方,当旋转电机和镜头一起向下运动时,由直线电机提供驱动力,需要克服弹簧推力;当旋转电机和镜头一起向上运动时,由弹簧提供驱动力。旋转电机加镜头质量约为1 g,胶囊竖直时旋转电机与导轨间的摩擦力忽略不计。导轨上的3个弹簧线径为0.1 mm,内径为1.2 mm,弹性系数为2 g/mm,3个弹簧并联等效为一个弹性系数为6 g/mm的弹簧。若采用200 kHz激光调制频率的扫频OCT模式[15],激光的光斑尺寸为26 μm(半高宽)[16],胶囊的外径为13 mm(约为激光旋转扫描时焦点圆的直径),则所需转速为3 820 r/min,相应的直线扫描速度为0.83 mm/s。此时squiggle®压电直线电机输出力约为50 g。选用长为8 mm的弹簧,当弹簧压缩到2 mm时,弹力为36 g,小于电机最大输出力,此时镜头直线行程为5.13 mm。可见,采用squiggle®压电直线电机和弹簧组合的直线驱动机构的OCT胶囊内窥镜是可行的。
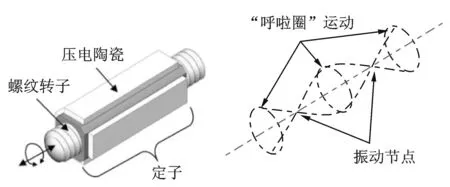
图3 squiggle®压电直线电机的结构和原理图Fig.3 The structure and working principle of squiggle® piezoelectric linear motor

图4 SQL-RV-1.8电机实物Fig.4 The photograph of motor model SQL-RV-1.8
3 旋转电机结构
OCT胶囊内窥镜要求旋转电机具有高转速、实现快速扫描、减少食道蠕动等因素对成像的影响。旋转电机采用基于圆环形薄板面外弯曲模态的超声电机,结构如图5所示。定子材料为磷青铜,圆板直径为8 mm,厚为0.8 mm,四周均布置3个内径为1 mm的圆环,用于将电机固定在胶囊导轨上沿导轨滑动。定子中间的柱体长为5 mm,外径为2.2 mm,壁厚为0.3 mm。定子圆盘两面粘接了两块PZT-8陶瓷。中空轴转子用铝合金制造,中间通孔直径为0.8 mm,主体外径为1.4 mm,转子一端通过一个凸台和定子柱体面接触,定子柱体的另一个端面与内径为1.4 mm、外径为2.2 mm的垫片接触,电机工作时就是由这两个接触面之间的摩擦力将定子振动转化为转子转动。卡盘卡在转子轴上,通过调节卡盘的位置可以调节弹簧长度,给垫片和定子接触界面提供合适的预压力,从而产生驱动转子所需的合适摩擦力。预压力弹簧选用线径为0.1 mm,外径为2 mm,长为3 mm的不锈钢弹簧,压缩量为0.7 mm时电机运转良好,此时预压力为0.04 N。图6为所制备旋转电机的照片,其径向尺寸和轴向尺寸不超过12 mm,整体结构紧凑。
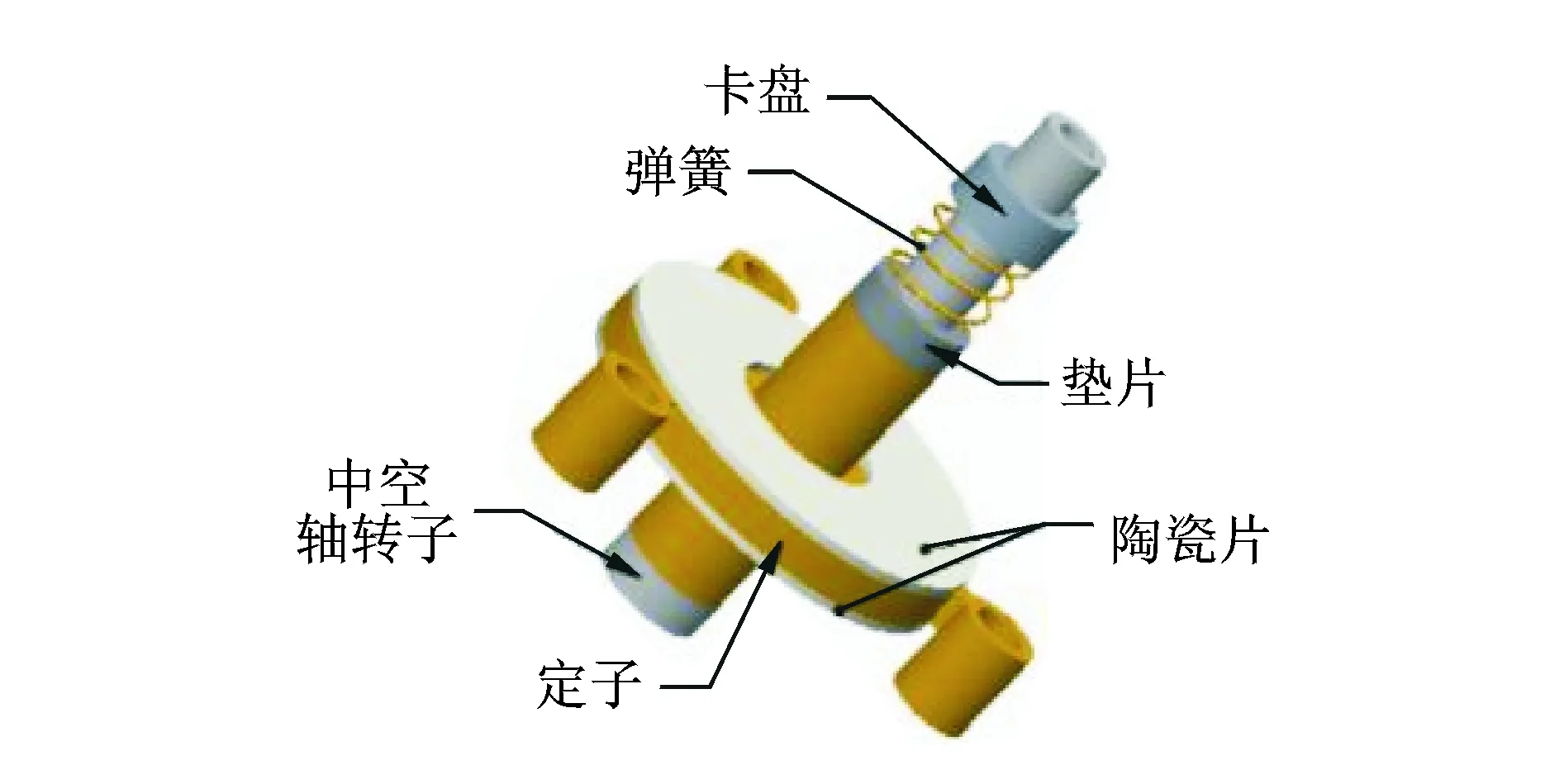
图5 旋转电机结构图Fig.5 The structure drawing of rotational motor

图6 旋转电机实物照片Fig.6 Photograph of the rotational motor
电机的两片压电陶瓷都采用PZT-8材料(具有小的损耗和大的功率密度),内径为3 mm,外径为8 mm,厚为0.5 mm,极化方向和所加的驱动电压如图7所示。上下两片陶瓷都分成4个区极化,极化方向为“+ + - -”,每片陶瓷每个分区测得d33值都在360 pc/N左右(ZJ-3AN型准静态d33测量仪)。电机装配时陶瓷接地的一面用环氧树脂粘接在定子上,两片陶瓷每个区“+”“-”相对。驱动时分别将幅值和频率相等、相位相差90°的正弦和余弦电压间隔加在陶瓷的4个区,上下两片对应位置电压相同。地线接在磷青铜定子上,电机工作时接入两路信号即可。
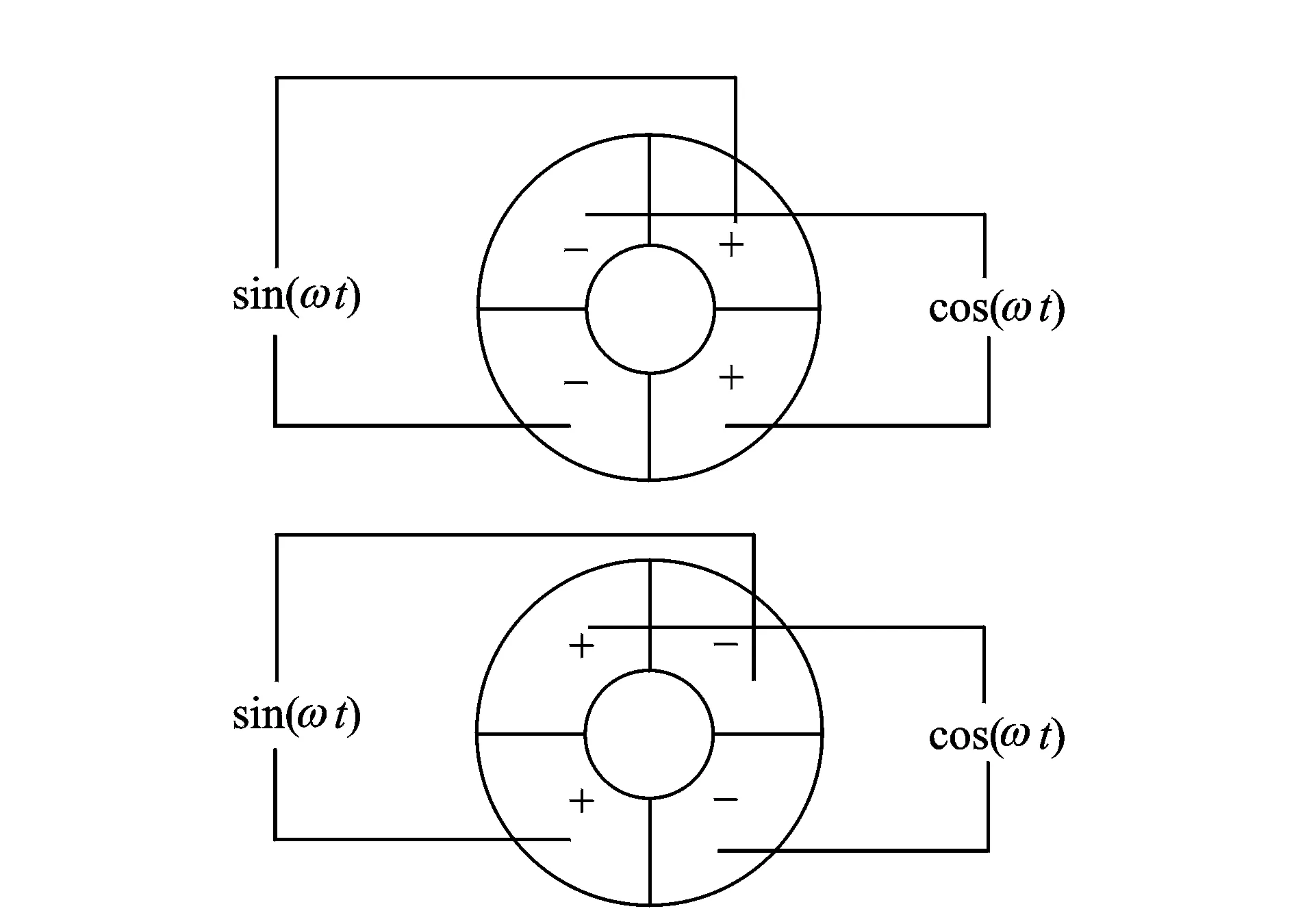
图7 陶瓷片极化方向及所加电压示意图Fig.7 Polarization directions of PZT ceramics and input signals
4 旋转电机原理及有限元分析
为了使定子产生足够大的振幅驱动转子,超声电机通常工作在共振频率附近,选择合适的模态是超声电机能够工作的重要因素。利用有限元软件仿真可以在设计电机时确定定子的模态,为电机设计提供指导。为使激光能穿过电机,选用圆环形薄板面外弯曲模态作为定子的工作模态,通过在圆环形薄板内部的空心圆柱放大面外弯曲模态的振幅来提高电机的转速。定子振动能驱动转子旋转的条件是在定子柱体两个端面上产生周向的行波,最简单的方法是使柱体同时产生两个方向垂直、相位相差90°的摆动,当这两个摆动同时激发时可在柱体端面合成周向行波。在定子圆环板内激发弯曲模态B11(Bmn中m表示节圆数,n表示节径数)即可实现定子圆柱的摆动。通过有限元软件的特征频率仿真可以找到定子圆环板面外弯曲模态B11,谐响应仿真可以看到两相激励信号同时施加时能否在定子柱体端面产生行波。
圆环形薄板的固有频率[17]为
其中:λmn为圆环形薄板面内固有振动模态频率常数;m为节圆数;n为节径数;a为薄板外径;ρ为材料密度;h为薄板厚度;μ为材料泊松比;E为材料弹性模量。
由该公式可知,圆板外径和圆板厚度会影响定子的工作频率。
采用COMSOL Multiphysics 5.1进行有限元模拟,设置边界条件:电机定子外围的3个圆环套在滑轨上滑动,圆环与滑轨配合的间隙大于定子振动的幅度,设定定子的边界条件为自由。仿真所用材料参数如下:磷青铜的弹性模量为1.13×1011Pa;泊松比为0.33;磷青铜的密度为8 800 kg/m3;PZT-8陶瓷片密度为7 600 kg/m3。
柔度矩阵
压电矩阵
相对介电常数矩阵
在建模设定定子尺寸时,考虑到更大面积的陶瓷片可以激发出定子更大的振幅,提高电机的转速和驱动力,受胶囊尺寸限制,取定子圆环外径为8 mm,定子圆柱的直径和壁厚受装配和加工条件的限制,取内径为1.6 mm,壁厚为0.3 mm。确定圆环板外径后,影响B11模态频率的主要参数为圆板厚度和圆柱高度,B11模态振型如图8所示。仿真结果显示,定子在B11模态附近的3个模态分别为B10,B03a,B03b,通过依次改变圆板厚度和柱体高度得到两个尺寸对定子模态的影响如图9, 10所示。可见,圆板厚度同时影响这几个模态频率,薄板厚度取0.8 mm,柱体高度主要影响B11模态的频率,对其他模态的频率影响较小,柱体越高,B11模态频率越低。为了电机工作稳定,需要尽量避开其他模态对工作模态的影响,即B11模态频率离其他共振频率尽量远,因此取柱体高度为5 mm,仿真得到B11模态频率为92 266 Hz和 92 384 Hz。出现两个频率的原因是定子周围的3个圆环破坏了对称性,导致同型模态频率分离。谐响应仿真得到定子圆柱端面的行波如图11所示,验证了设计的可行性。
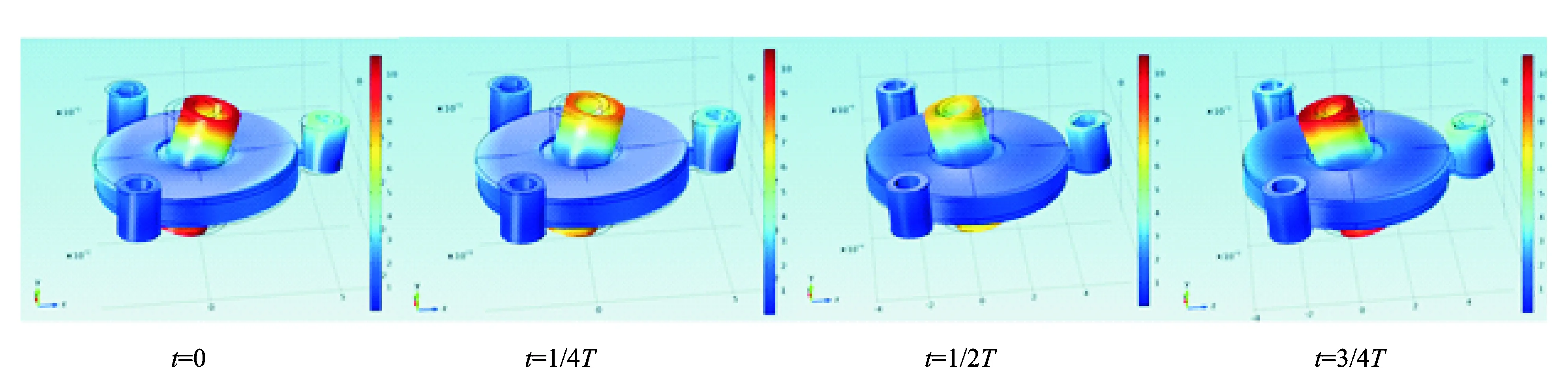
图8 有限元计算得到的B11模态图Fig.8 The B11 mode shape by FEM simulation
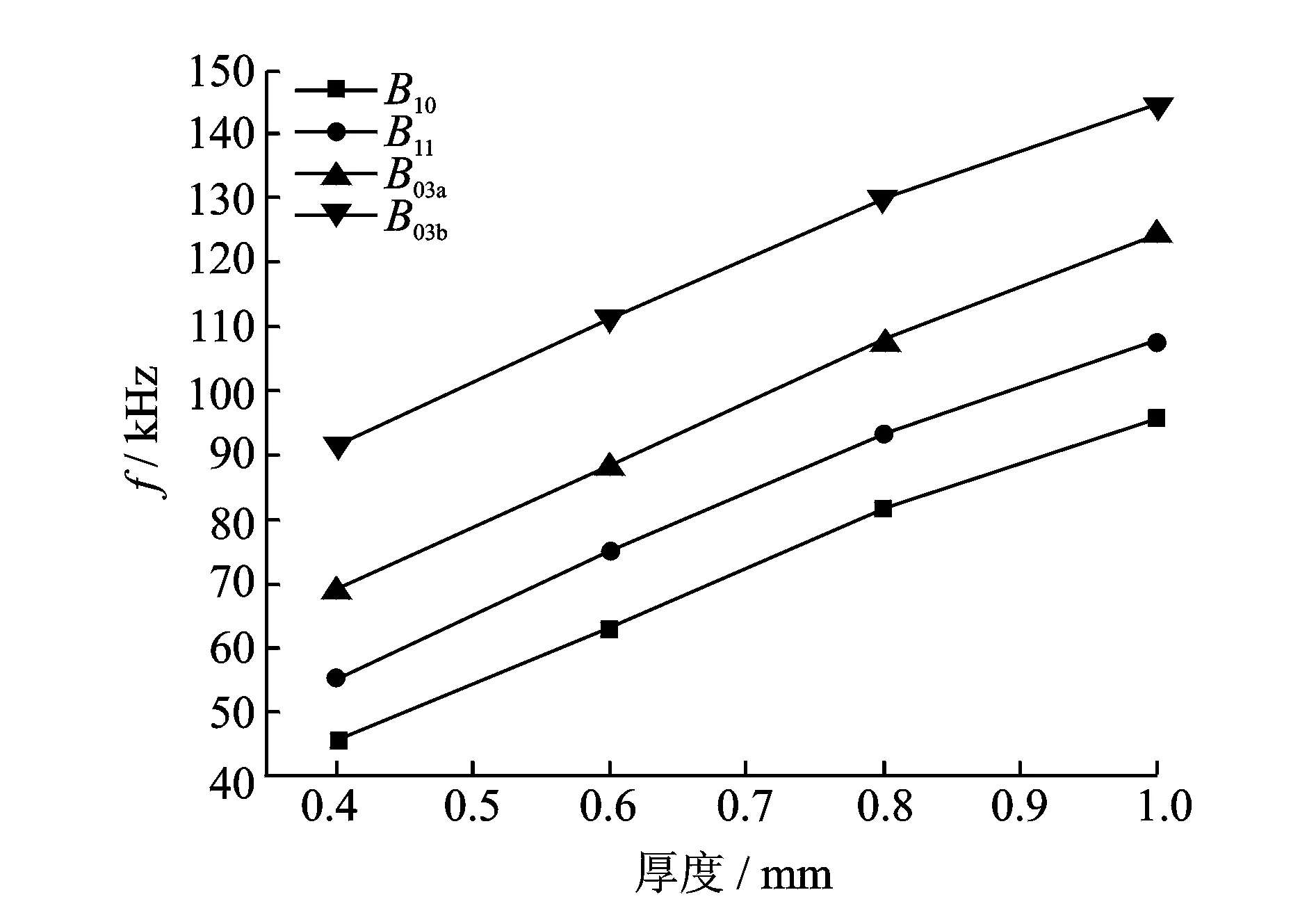
图9 圆板厚度和模态频率的关系Fig.9 The relationship between the circular plate thickness and the modal frequency
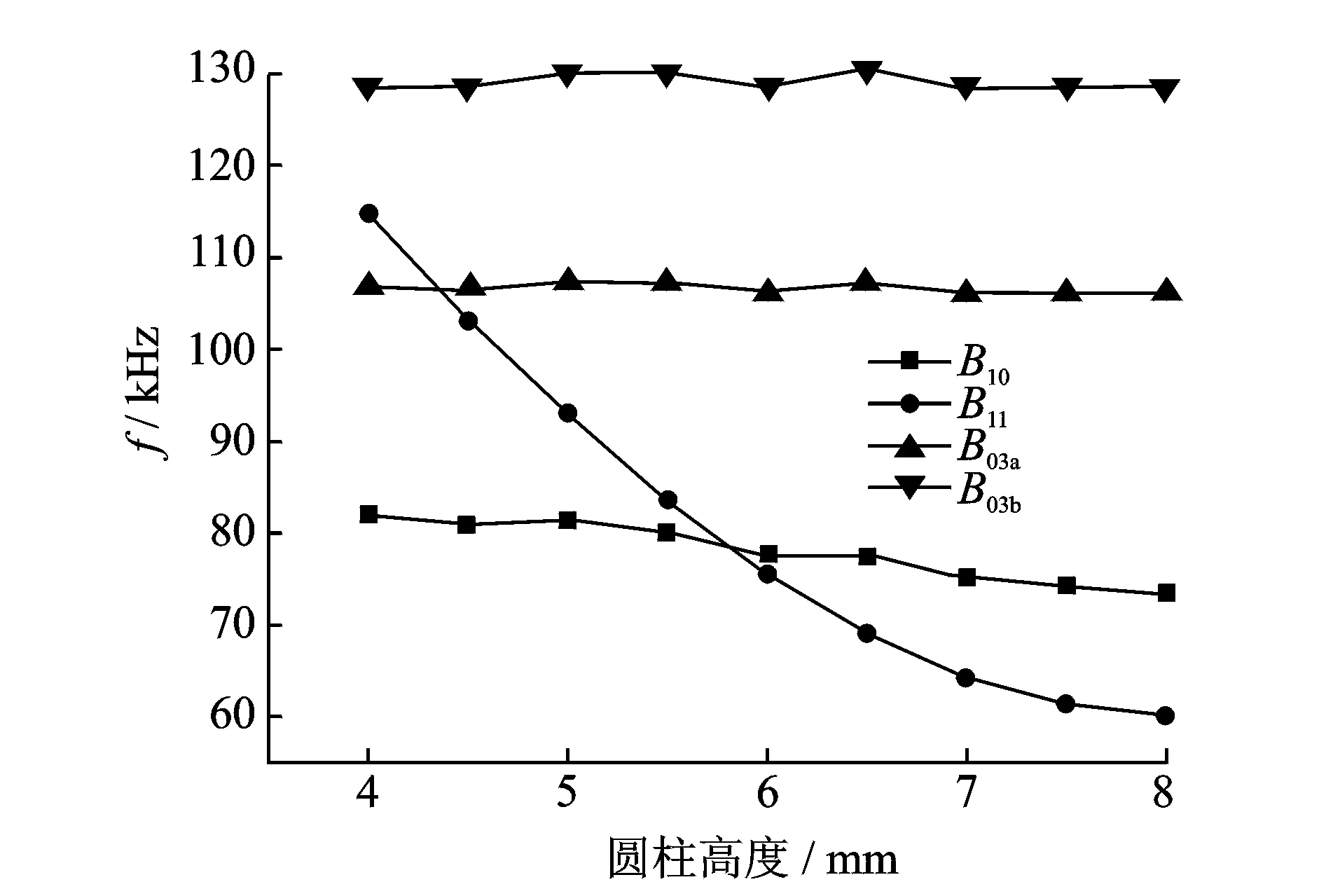
图10 圆柱高度和模态频率的关系Fig.10 The relationship between the cylinder height and the modal frequency
图11 定子圆柱端面的行波Fig.11 Traveling wave of cylindrical end face
5 旋转电机性能测试
电机组装后用Agilent 4294A阻抗分析仪测得电机阻抗如图12所示。当定子达到共振状态时,阻抗会产生一个极小值,而在反谐振频率处阻抗有一个极大值,在谐振频率附近相角也会有较大变化。测量时,将电机地线接在阻抗分析仪负极,两路输入信号中的一路(全部的sin(ωt)输入端或者全部的cos(ωt)输入端)接在阻抗分析仪正极,得到阻抗曲线。可以看到,定子在85 kHz出现了共振峰, 与计算结果接近,且在70 kHz~100 kHz没有明显的干扰峰存在。
OCT胶囊内窥镜对旋转驱动机构的主要要求是高转速,旋转超声电机的转速随驱动频率以及电压而变化,通常超声电机的转速调节都是调节驱动信号的这两个参数实现。由于电机尺寸和扭矩都很小,不方便安装也难以驱动编码器,因此选用U型光电开关作为测速传感器。测试前在电机转轴上固定一个沿半径开槽的圆纸板,每次开槽位置穿过光电开关的U型槽时会产生一个脉冲电信号,通过示波器读出脉冲频率就可以得到电机转速。测速系统由信号发生器(Tektronix,AFG3022B)、直流电源、高频功率放大器(南京佛能科技,HFVP-83A)、示波器(Tektronix,DPO2014)及U型光电开关组成,如图13所示。
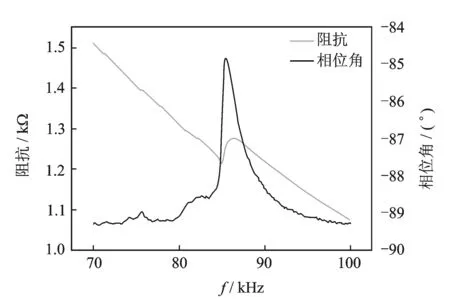
图12 制备的电机阻抗与相角曲线Fig.12 Plot of impedance and phase angle of the fabricated motor
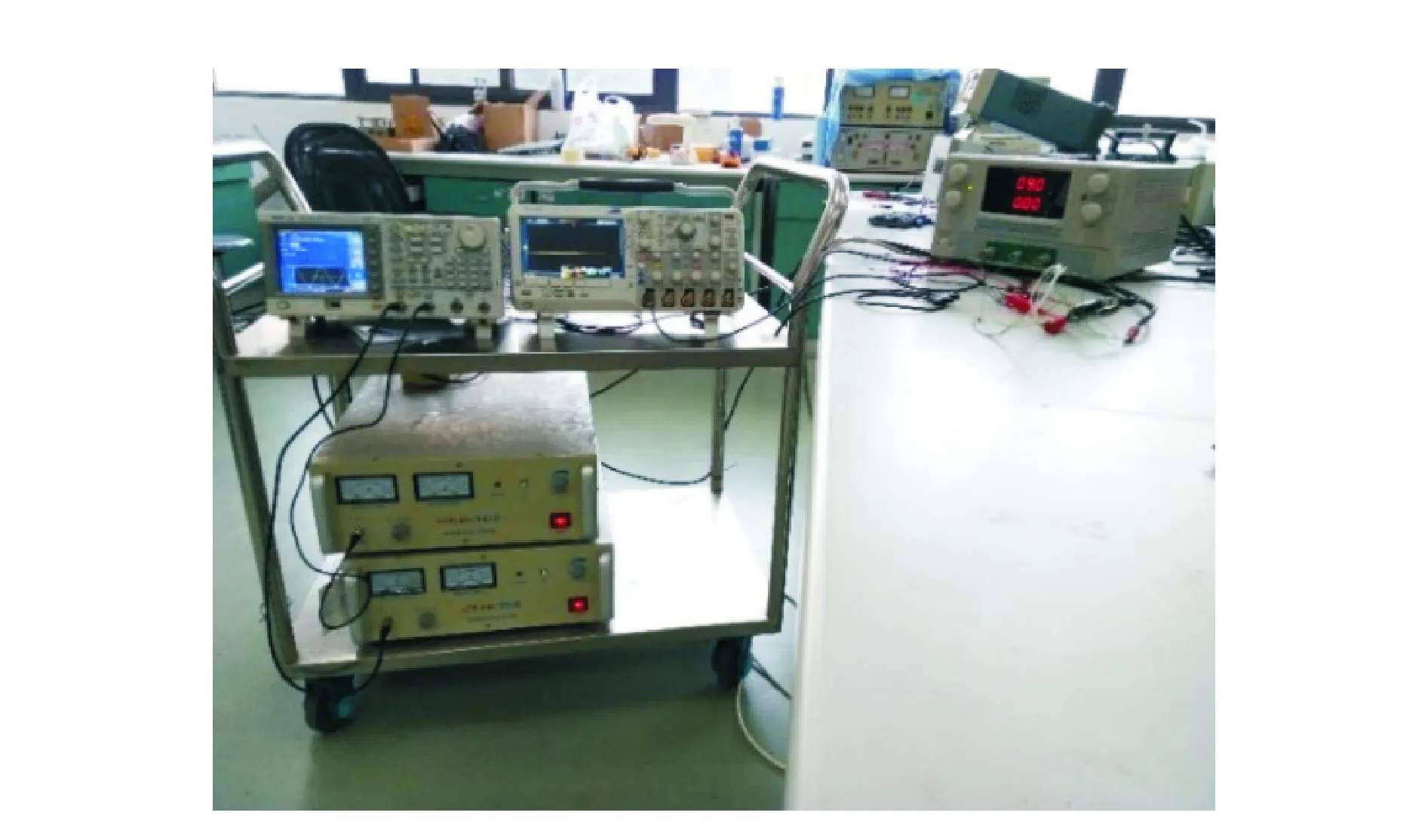
图13 旋转电机测试平台Fig.13 Test platform of rotating motor
实验测得60Vp-p电压驱动时频率-速度曲线如图14所示。可见,在频率为78.5 kHz时电机转速最大,为4 200 r/min, 已经可以满足200 kHz激光调制频率的扫频OCT模式。 目前, MEMS VCSEL激光器的调制频率可高达1 MHz,在胶囊尺寸和光斑尺寸不变的情况下相应所需旋转扫描速度为19 100 r/min,直线扫描速度能提高到4.1 mm/s。
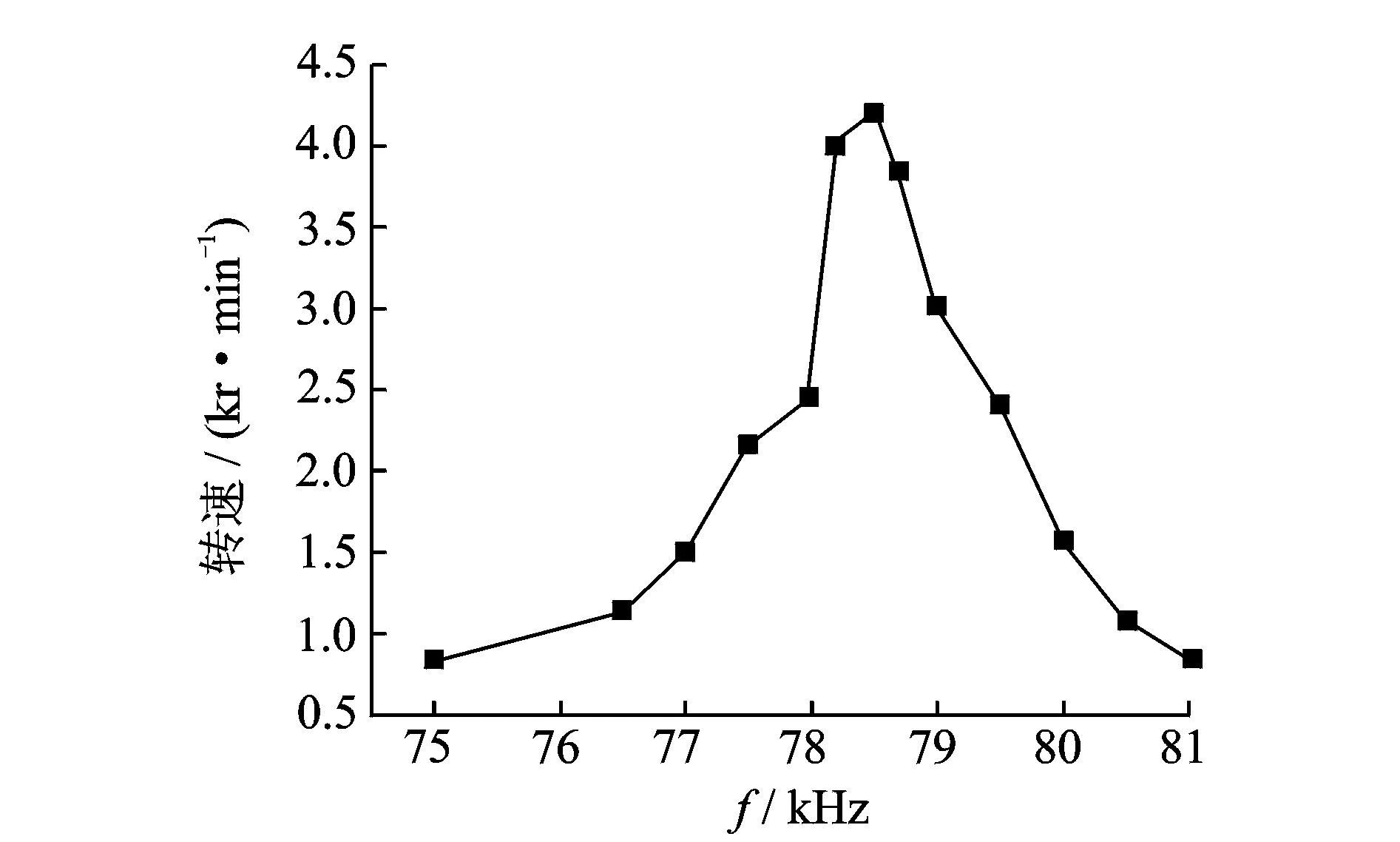
图14 60Vp-p电压驱动时频率-转速关系Fig.14 Frequency- rotation speed plot under the driving voltage 60Vp-p
取频率为78.5 kHz,测得的电压-转速曲线如图15所示。电机转速随电压升高而增大,当电压到80Vp-p时,转速为5 760 r/min。
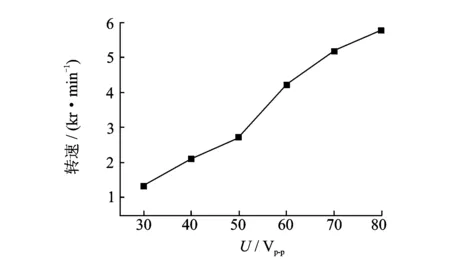
图15 78.5 kHz时驱动电压-转速关系Fig.15 Voltage-rotation speed plot under the driving frequency of 78.5 kHz
6 结束语
设计了基于两个压电超声电机作为驱动机构的食道胶囊内窥镜光扫描机构。超声电机具有响应速度快、能断电自锁,设计灵活,工作不产生磁场的特点,使其非常适合作为OCT内窥镜的驱动机构。设计并制备了用于胶囊内窥镜的旋转超声电机,测得最佳工作频率为78.5 kHz,该频率下当电压为60Vp-p时,转速为4 200 r/min,达到了设计要求。接下来的工作是进一步提高旋转电机转速及完善胶囊结构设计,满足实际使用的要求。
