改进的遗传算法在机器人运动学中的应用
2018-08-23沈婷婷
时代农机 2018年6期
沈婷婷
(山东科技大学,山东 青岛 266590)
1 机械手简介
机械手主要由执行机构、驱动机构和控制系统三大部分组成。
2 建立模型
2.1 采取改进的遗传算法来优化机械手求逆解的问题
利用现有数据建立机械手运动模型:

式(1)为模型的目标函数。
2.2 根据模型的特点设计相应的遗传算法进行求解
(1)初始化群体。每个机械手运动的逆解采用如下方式计算和生成:

式中[ ]为取整函数;R为[0,1]内的随机数。
设置初始化进化代数为Gen=10。根据式(9)及式(10)生成一个初始种群作为第一代解。
(2)评价群体。
在本文中,适应度按如下公式计算:

(3)进行遗传操作。①选择。每次随机选取两个个体,分别计算其适应度,比较两个个体适应度大小,从中选出适应度大的那个作为新个体,重复操作,直到选出的个体等于种群大小为止;②交叉。在文中采用单点交叉来计算新个体的基因。如不满足,则重新选择个体进行交叉操作;

③变异。根据模型约束条件,把突变点的位置限制在第1位到第n-1位之间。

对完成交叉操作的个体,还需根据式(13)再进行变异操作,从而得到最新一代种群。
(4)终止。当Gen=Maxgen时,遗传算法终止;否则,Gen=Gen+1,转到第3步,继续循环。
2.3 MATLAB仿真结果
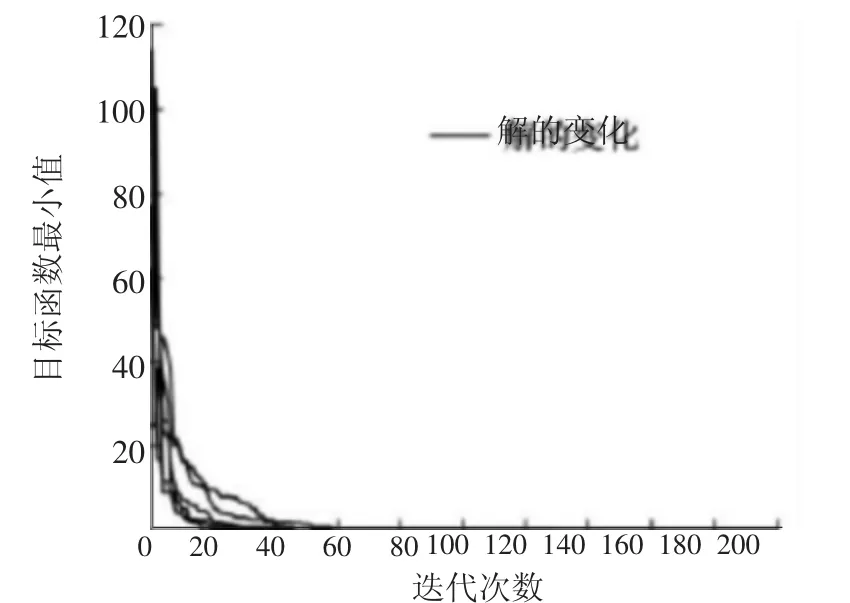
图1 MATLAB仿真结果
由仿真结果可以看到,改进后的遗传算法在进化到20代之前就已经基本上达到了最优解。
3 结语
针对平面关节型机器人的运动学进行建模分析,为了避免传统机器人求逆解方法的多解性、解的不存在性以及需多解的选取的缺点,本文采用了改进的遗传算法,算法的收敛速度更快,求解精度更高,稳定性更好。
