线性自抗扰控制在火电机组主蒸汽温度控制中的应用仿真
2018-08-20贺勇刘备崔承刚郭为民王亚东
贺勇 刘备 崔承刚 郭为民 王亚东
摘 要:针对大容量火电机组的直流锅炉主蒸汽温度控制难度较大问题,研究了线性自抗扰控制技术(LADRC)对经典串级PID技术在温度控制特性上的提高。首先介绍了大容量火电机组的直流锅炉温度控制特性及其机理模型,然后介绍了線性自抗扰控制技术的控制思想与原理,最后利用simulink工具进行模型搭建,对主蒸汽温度控制进行仿真实验。仿真结果表明,相对经典串级PID技术而言,线性自抗扰控制技术具有更强的鲁棒性和抗干扰性能。
关键词:自抗扰技术;PID;主蒸汽温度控制;扩张状态观测器
DOI:10.16640/j.cnki.37-1222/t.2018.13.163
0 引言
大型火电机组均采用直流锅炉,锅炉提供的过热蒸汽进入汽轮机,并推动发电机进行发电。锅炉出口处的蒸汽温度、压力、流量等特性决定了机组的安全性、发电量以及经济效益等特性。其中600MW超临界机组的主蒸汽温度设定值一般为560°C,主温度过低会使得机组的热效率降低,由于主蒸汽设定温度接近过热器管道的钢结构的耐受温度,主蒸汽温度过高则会造成过热器管道爆管,对整个机组的安全运行构成威胁,因而控制锅炉出口处的过热蒸汽温度保持稳定具有极其重要的作用。
超(超)临界机组的锅炉为直流锅炉。要保证主蒸汽温度的稳定,其汽温控制的基本措施是保持煤水比进行粗调,利用减温喷水进行细调[1]。目前大部分电厂采用串级PID对主蒸汽温度进行控制,选取喷水口的蒸汽温度为导前量进行控制。在内环中对喷水口处的蒸汽温度进行控制,在外环中对过热器出口处的蒸汽温度进行控制。使用经典串级PID进行主蒸汽温度控制往往难以取得比较理想的控制效果,甚至影响机组自动发电控制(AGC)和锅炉运行的安全和稳定。
自抗扰控制(Active Disturbance Rejection Control)是韩京清研究员于上个世纪八十年代末提出的一种新型控制技术,它是一种估计补偿不确定因素的控制技术[2]。自抗扰控制技术在对控制对象进行控制时,不需要知道系统的数学模型,对非线性、大惯性、不确定时滞等复杂系统具有很好的控制效果[3]。但自抗扰控制器中需要整定的参数很多[4],限制了它在实际工程中的应用。近年来,中外学者对自抗扰控制技术进行了研究和发展,高志强等学者[5]提出了线性自抗扰技术(linear ADRC),线性自抗扰控制技术使得参数整定工作大大简化[6],便于在实际工程中进行应用,近年来LADRC在化工、航天、电厂、军工等行业内均有大量应用[7]。
本文以某电厂600MW超临界燃煤发电机组为控制对象,将线性自抗扰控制技术应用于锅炉主温度控制,以此来满足火电机组对主蒸汽温度控制的要求,改善系统的控制品质。
1 直流锅炉主蒸汽温度控制特性
过热器在高温、高压的环境下工作,且过热器出口的蒸汽温度是整个汽水流程中的最高点,也是金属壁温的最高点。因而现代火电厂要求主蒸汽温度的偏差范围很小。蒸汽温度会受到很多因素的影响,包括锅炉负载、给水温度、炉膛过量空气参数、受热面污染情况、燃料性质和燃烧器的运行方式等。由于蒸汽流量大、蒸汽管道长等因素存在,锅炉蒸汽这个物理对象本身就存在着大惯性、大延迟和时变特征。
实际工程应用中,火电机组的主蒸汽温度控制一般采用串级PID控制策略。采用这种策略主要是因为PID控制具有很强的鲁棒性,能够增加整个系统的稳定性。但系统的控制准确性、快速性则相应恶化。
主蒸汽温度系统工艺流程简化图1所示。
以末级减温器为例,得到主蒸汽温度串级控制系统原理方框图如图2所示。
在温度控制系统中,整个被控对象化为两个控制区域,即“惰性区”和“导前区”,分别为图2中的W2(s)和W1(s)。一般取喷水减温器后的温度(图中θ1)作为内回路的反馈信号,末级过热器后的温度(图中θ2)为被调对象[7]。一般情况下,导前区的迟延和惯性比惰性区要小得多。当内回路发生扰动时,需要调动内环路的副调节器及时控制,此时被控对象θ2还未来得及变化,能够减少控制对象的波动,比较两个回路的控制速度可知,内环是高速回路,外环是低速回路。
2 线性自抗扰技术
2.1 LADRC对主蒸汽温度控制对象的适应性
现代火电厂要求主蒸汽温度的偏差范围很小,然而蒸汽温度会受到很多因素的影响。锅炉蒸汽这个物理对象本身就存在着大惯性、大延迟和时变特征。过热蒸汽的过程参数和模型结构会受到噪声和负载扰动的影响发生改变,被控对象的模型往往是不确定的、时变的。因此,传统的PID控制已经难以满足现代工业的生产需求。而LADRC控制策略对扰动的消除效果特别优异,因而适用于主蒸汽温度的控制。
2.2 LADRC控制器原理
经典自抗扰控制由跟踪微分器(TD)、非线性反馈(NLSEF)和扩张状态观测器(ESO)三部分组成,且三部分中均采用了非线性的函数[8]。非线性环节会在一定程度上使控制效果更加优化,但参与控制的参数多,且无固定的参数整定原则,只能使用试凑法进行参数整定。高志强等学者提出了线性自抗扰控制的概念,将反馈控制结构采用线性形式,使得其参数整定工作大大简化,也使自抗扰控制技术的理论分析得到了进一步的发展。
LADRC控制器的结构图如图3所示。
线性自抗扰技术(LADRC)取消了TD,而线性扩张状态观测器(LESO)是核心环节,可以用来实时估计和补偿被控系统的总扰动。以二阶系统为例,其被控系统可以描述为:
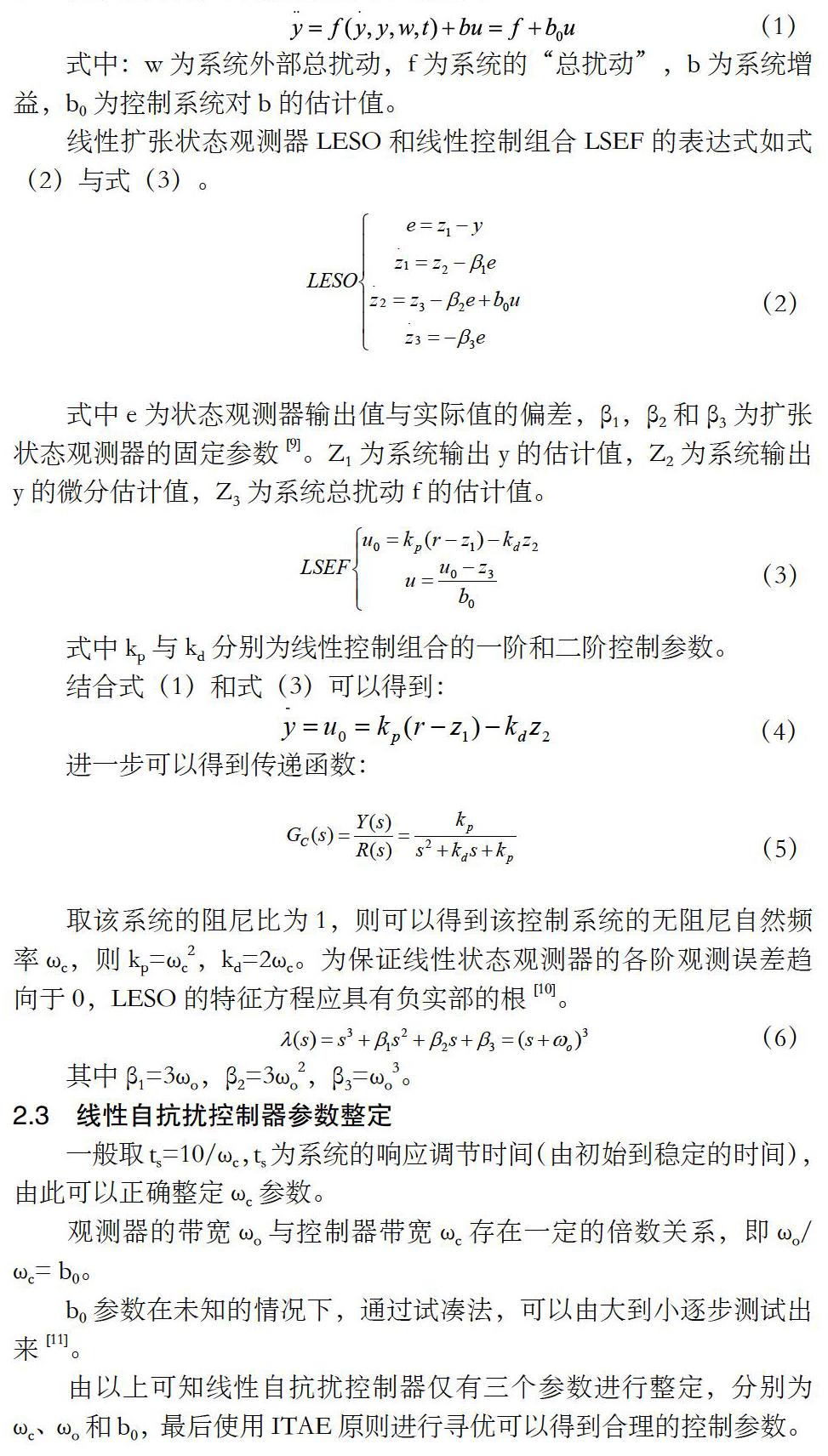
线性扩张状态观测器LESO和线性控制组合LSEF的表达式如式(2)与式(3)。
式中e为状态观测器输出值与实际值的偏差,β1,β2和β3为扩张状态观测器的固定参数[9]。Z1为系统输出y的估计值,Z2为系统输出y的微分估计值,Z3为系统总扰动f的估计值。
取该系统的阻尼比为1,则可以得到该控制系统的无阻尼自然频率ωc,则kp=ωc2,kd=2ωc。为保证线性状态观测器的各阶观测误差趋向于0,LESO的特征方程应具有负实部的根[10]。
2.3 線性自抗扰控制器参数整定
一般取ts=10/ωc,ts为系统的响应调节时间(由初始到稳定的时间),由此可以正确整定ωc参数。
观测器的带宽ωo与控制器带宽ωc存在一定的倍数关系,即ωo/ωc= b0。
b0参数在未知的情况下,通过试凑法,可以由大到小逐步测试出来[11]。
由以上可知线性自抗扰控制器仅有三个参数进行整定,分别为ωc、ωo和b0,最后使用ITAE原则进行寻优可以得到合理的控制参数。
3 控制模型仿真
本文采用的控制对象为600MW超临界机组的过热器模型,不同发电负荷率情况下,控制对象的导前区函数、惰性区函数均不同。过热器数学模型如表1所示。
在以上模型中,选取75%工况点的相关函数为控制对象。
LADRC控制温度模型结构如下:
为了体现LADRC的优越性,在实验安排上选择使用LADRC-PID与PID-PID做对比。
根据整定原则,分别对b0、ωc和ωo进行整定,得到其参数LADRC
控制器的参数为b0=0.00125,ωc=0.03,ωo=0.14。
串级PID的主控制器参数为kp=1,ki=0.013,ki=0.01。
两种控制器的内环PID参数均为kp=1。
在初始时刻加入幅值为1的阶跃响应,并在1000s时在内环PID出口后之后,喷水阀入口之前加入0.2的内扰,观察两种控制器的控制效果。
相关的实验数据对比如表2所示。
0-1000s,可以看出LADRC与PID在上升时间上相差无几,但采用LADRC会明显减小系统的超调量,会明显缩短稳定时间(本文选取的最大允许误差为2%)。
1000s加入内扰,可以看出LADRC的响应速度比PID略快,反调量相近,但稳定时间更短。
总体上,LADRC的控制性能要优于经典PID控制策略。
保持两种控制器的参数不变,改变机组的运行工况点模型,分别由75%调至100%和50%,做模型失配实验。
由对比图6、7可知,在系统的对象模型发生变化时,两种控制器的控制效果均有下降,均需要对参数进行调整,但LADRC的鲁棒性比PID略强。
综合以上可以得出结论,在超临界机组的主蒸汽温度控制系统中采用线性自抗扰(LADRC)技术能够优化工程控制效果,LADRC的抗干扰性能要明显优于传统PID,LADRC的鲁棒性略优于经典PID。
4 结语
分析了LADRC控制策略的基本原理,分析超临界机组主蒸汽温度控制的动态特性,将LADRC技术应用于主蒸汽温度控制策略中。通过与经典串级PID控制策略做仿真实验对比可知,LADRC具有很强的鲁棒性和抗干扰性能,能够实现过热器主蒸汽温度控制。LADRC的调节参数也较少,方便进行调试,因而可以作为新的解决方案在实际工程中进行推广应用。
参考文献:
[1]崔青汝,牛海明.1000MW二次再热火电机组主蒸汽温度控制策略及工程应用[J].中国电力,2017(06):27-31.
[2]韩京清.自抗扰控制技术--估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2016:207-211.
[3]韩京清.从PID技术到"自抗扰控制"技术[J].控制工程,2002(03):13-18.
[4]韩京清.自抗扰控制技术[J].前沿科学,2007(01):24-31.
[5]高志强.自抗扰控制思想探究[J].控制理论与应用,2013(12):1498-1510.
[6]Gao Z.Scaling and bandwidth-parameterization based controller tuning[C].Proceedings of the American Control Conference,2003:4989-4996.
[7]陈增强,程赟,孙明玮等.线性自抗扰控制理论及工程应用的若干进展[J].信息与控制,2017(03):257-266.
[8]竹瑞博,董泽,冉宁.自抗扰控制在火电厂主蒸汽温度控制中的应用[J].电力科学与工程,2012(05):46-49.
[9]陈宇,张锐锋,徐贵光等.大型火电机组协调系统的线性自抗扰控制[J].计算机仿真,2016(02):180-184.
[10]Qinling Zheng,Zhiqiang Gao.Predictive active disturbance rejection control for processes with time delay[J].ISA Transactions,2014,53(04).
[11]胡昌镁,任军.线性ADRC在汽包水位串级三冲量控制上的研究与应用[J].中国电力,2014(12):28-31.
作者简介:贺勇(1989-),男,河南开封人,硕士研究生,主要从事电力系统稳定与控制、热力发电建模分析研究。
