双目视觉系统相机标定研究
2018-08-18韩爱平
韩爱平
摘 要:双目立体视觉能够将道路场景内的三维空间信息进行快速复原,从而对运动目标完成三维空间的追踪及定位,将大大提升道路交通监控的智能化和自动化。其研究实质主要是怎么利用二维成像技术从左右两幅图像复原到所需场景的三维空间信息。在双目立体视觉实现中,相机标定技术是一种重要方法,在此本文介绍相机标定实现方法,并给出了基于MATLAB软件实现相机标定实例。
关键词:双目立体视觉;相机标定;内、外参数标定
0 前言
一个完整的双目立体视觉系统,首先使用左右各一台摄像机从不同角度同时获得三维客观景物的两幅二维数字图像,然后基于双目视差原理计算得到客观景物的数字三维信息,最后利用三维数据在计算机中虚拟出现实中客观景物的三维几何形状。双目立体视觉技术需要通过视频数据提供更多的信息,因此相机标定技术不可或缺[2]。本文介绍相机标定概念,并给出基于MATLAB软件的标定实例。
1 相机标定概念与方法
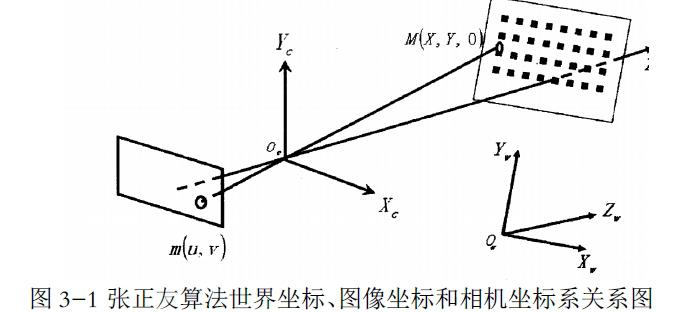
在计算机视觉中,二维图像上的点和三维空间物体表面相应点之间存在一种变换关系,而这种关系是由相机成像的几何模型来决定的,该成像模型的几何参数称为相机参数,确定这些几何参数的过程称为相机标定。相机标定的过程便是求解其内部参数和外部参数的过程。由于内部参数只与相机本身的参数有关,所以在确定好内部参数后,重要的是进行外部参数的标定。按照标定的基本思想差距,相机标定方法大体可分为三种:传统标定法、相机自标定法和基于主动视觉标定法[2]。在世界坐标系中,普遍情况下是以实际图像中某个固定参考点当作世界坐标系的原点。而在张正友算法中以标定物上特殊点当作世界坐标系的原点,并且世界坐标系的X轴和Y轴和标定物平行、Z轴和标定物垂直。
对于张正友算法标定点选取,一般选择能均匀分布于整个图像的一些点。对于相机标定精度而言,选取点越多,反应图像信息越完整,因而得到结果越好。可随着点数不断增加,运算量也不断增加,同时增多点数带来精度升高的效果随着点数增加而逐步削弱。是以,一般情况下张正友算法选择均匀分布于图像上的十个点。
2相机标定实现实例
相机标定实现是在标定模型的基础上,先后实现内参数标定和外参数标定。内参数标定是首先把靶标图像保留在toolbox_calib目录下。指出图像基本名与图像格式,在Matlab图形窗口显示出靶标图像。对用于标定的每幅靶标图像进行角点提取。内参数标定给出初始化后标定成果和优化后标定成果。其中,对内参数优化采用L-M梯度下降法[3]。优化后成果中给出的参数不确定性是3倍的标准方差。初始化后标定结果:
Focal Length: fc = [673.45516 673.45516]
Principal point: cc = [319.50000 239.50000]
Skew: lpha_c = [0.00000 ] => angle of pixel = 90.00000 degrees
Distortion: kc = [0.00000 0.00000 0.00000 0.00000 0.00000]
优化后标定结果:
Focal Length: fc = [657.80887 658.51372 ] ±[ 1.86106 1.34683]
Principal point: cc = [302.95191 248.06759 ] ±[ 1.88046 2.85817]
Skew: alpha_c = [0.00000 ]±[0.00000] => angle of pixel axes = 90.00000 ±0.00000 degrees
Distortion: kc = [-0.25853 0.14834 0.00074 -0.00030 0.00000 ] ±[0.00784 0.03727 0.00085 0.00042 0.00000]
Pixel error: err = [0.15205 0.12424]
在实现内参数标定后,对棋盘格靶标相对相机的外参数进行标定。标定结果如下
Translation vector: Tc_ext = [-531.674715 400.142025 1999.135937]
Rotation vector: omc_ext = [2.258838 -0.002845 0.157413]
Rotation matrix: Rc_ext = [0.992075 -0.055515 0.112716
0.051405 -0.639246 -0.767282
0.114649 0.766996 -0.631327]
Pixel error: err = [0.14406 0.10000]
在外参数标定结果中,Tc_ext为靶标坐标系原点在摄像机坐标系中的位移向量,单位为mm;omc_ext为对应于姿态矩阵的rodrigues旋转向量;Rc_ext为旋转矩阵;err为将网格角点反投影到图像空间的误差的标准方差,单位为像素。
3 结语
本文对计算机视觉中相机标定的相关知识进行了介绍,并通过先后进行内参数标定与外参数标定完成了一個标定实例,阐明了双目立体视觉系统中相机标定技术的具体实现过程。
参考文献:
[1]尹力.基于 Open CV的计算机视觉三维重建方法研究[D].合肥: 安徽大学,19 - 32.
[2]徐杰.机器视觉中摄像机标定 Tasi 两步法的分析与改进,计算机工程与科学,2010,32(4):45-48
[3]黄侃.计算机立体视觉中的摄像机标定算法的研究与应用[D].沈阳: 沈阳工业大学,2007
