基于虚拟负电阻的航空静止变流器并联控制策略
2018-08-17李昱泽裴雪军王涵宇
李昱泽,裴雪军,王涵宇,陈 志,康 勇
(华中科技大学电气与电子工程学院,武汉430074)
微网作为一种新型电网模式,近年来受到越来越多的关注。微网中的储能系统在公共连接点并入微电网。在孤岛运行模式下,储能系统可以为整个微网提供电压和频率支撑[1]。在航空电源微网中,通常也含有储能系统,以保障飞机负荷的稳定供电。航空电源频率通常为中频400 Hz,可以分为旋转电机式和静止式。旋转电机式一般采用油机或者交流电动机拖动,其效率低,噪声大;而采用电力电子技术的静止式中频电源电能转换效率高,体积、重量和噪音都更小。因此静止式中频电源供电即航空静止变流器已经成为中频供电的主流发展方向[2]。
实际上,航空静止变流器的功率容量目前仍因技术而受限。为了增加航空电源储能系统的容量,可采用多台变流器并联的模式。当多台变流器并联时,由于每台变流器的控制参数、滤波器参数以及杂散参数的不同,各台逆变器的输出阻抗存在差异,另外,由于各逆变器与公共连接点的距离不同使得线路阻抗也存在差异。这些问题都会导致并联系统的功率分配不均。当并联系统连接的负载不对称时,不对称电流会在线路上产生不对称压降,造成公共连接点的三相电压不对称,影响供电的质量。为了实现并联系统功率均分,国内外学者提出了基于互联线的并联控制策略[3-4],例如集中控制、主从控制以及分散逻辑控制;也有学者将类似同步发电机下垂特性的下垂控制策略引入并联系统,即为下垂控制[5-11]。传统下垂控制适用于储能变流器总的输出阻抗呈纯感性的系统中,即有功功率与功率角为强耦合,与电压幅值为弱耦合;无功功率与电压幅值为强耦合,与功率角为弱耦合。因此,传统下垂控制为有功频率下垂(P-f)和无功电压下垂(QV)。而在中低压微网中,线路阻抗比大,造成了功率耦合,影响了系统功率均分。因此有些学者引入了虚拟阻抗的策略,将系统阻抗改造成感性[9-13],实现有功和无功的解耦,改善了系统功率均分效果。但是虚拟阻抗的引入,一方面会使得负载电流在虚拟阻抗上产生压降,进而降低系统的公共连接点的电压水平;另一方面,在系统中带有不对称负载时,会加剧系统电压的不平衡度。因此又有学者引入虚拟“负”阻抗的策略[10-11],降低了线路压降。
本文采用有互联线的分散逻辑控制方式对系统的功率进行均分,并引入虚拟负电阻,降低公共点的电压不平衡度。
1 航空静止变流器系统架构
1.1 航空储能变流器拓扑结构
航空电源的系统结构如图1所示,飞机直流发电机产生的270 V直流电分别通过DC/DC和DC/DC/AC航空静止变流器连接至直流负荷和飞机的交流微网系统[14]。本文主要研究的是连接交流微网的航空静止变流器的并联控制技术。由于航空微网中负荷往往是不平衡的,采用三相四线制供电模式具有带不平衡负载的能力。考虑到航空电源对变流器体积和重量的高需求,因此采用可以形成三相四线制供电的三相四桥臂拓扑。
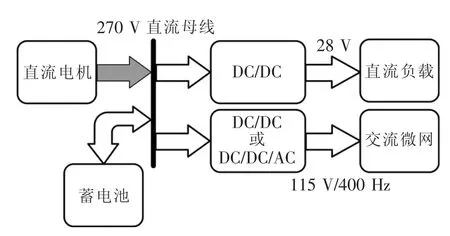
图1 航空电源系统结构Fig.1 Structure of aviation power supply system
本文研究的并联逆变系统采用2台三相四桥臂逆变器并联结构,其系统拓扑如图2所示,在传统的三相三桥臂拓扑上增加了第4个桥臂,桥臂中点连接三相输出的公共点,采用合理的控制策略可以将第4桥臂等效成中线,使系统具有带不平衡负载的能力。通常情况下,需要在第4个桥臂的中线上增加电感L,形成带中点电感的三相四桥臂逆变器。中线电感的引入可以消除第4桥臂输出电压的高频分量,减小输出电压的畸变率,提高逆变器整体的波形质量。
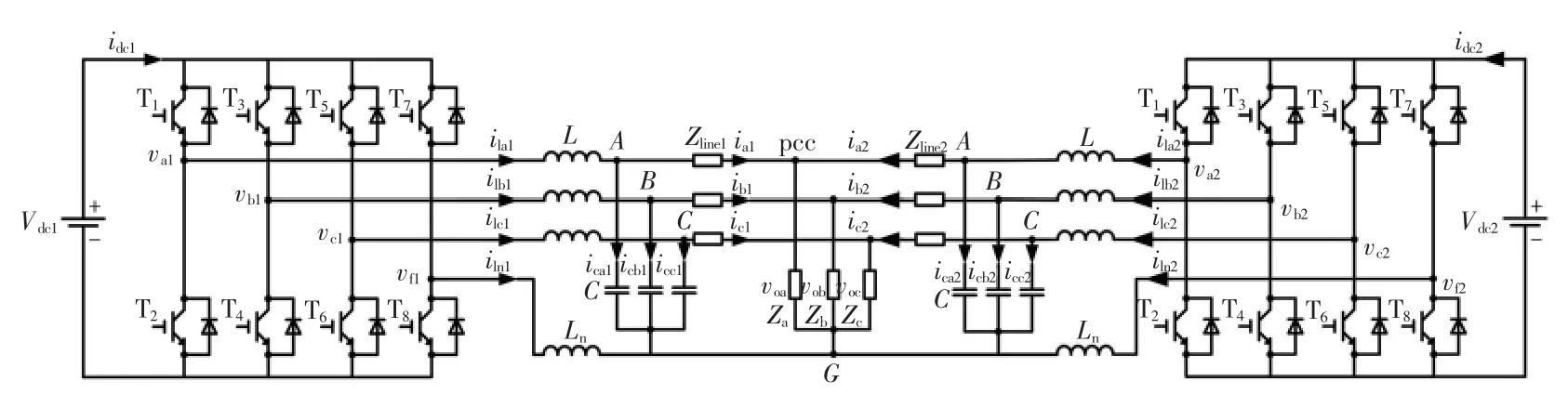
图2 三相四桥臂逆变器并联系统拓扑Fig.2 Topology of parallel system with three-phase four-leg inverters
1.2 三相四桥臂逆变器在αβ0坐标系下的数学模型及控制器
对三相四桥臂逆变器进行建模时,首先需要选择合适的坐标系。通常可以选择的坐标系有abc坐标系、dq0坐标系以及αβ0坐标系。首先在abc坐标系下建立模型,即
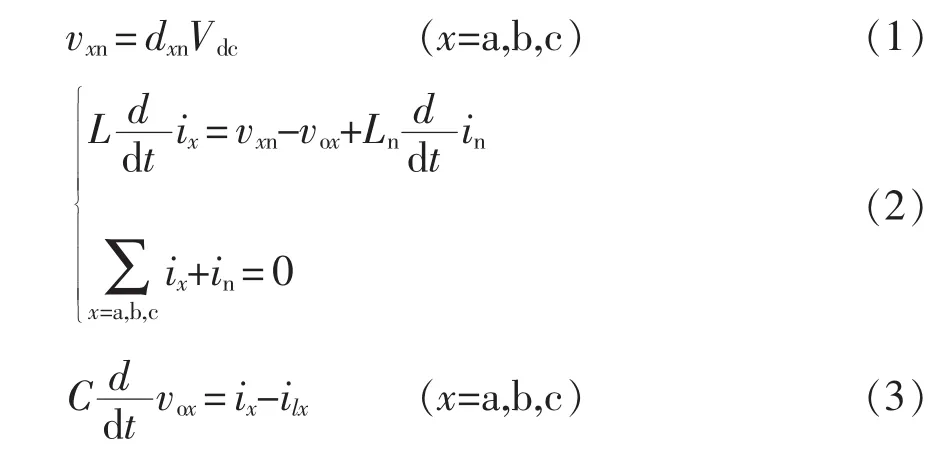
式中:vxn为三相桥臂输出电压;dxn为三相的电压占空比;Vdc为直流侧电压;ilx为三相电感电流;vox为负载电压;Ln为各桥臂电感;iln为中线电感电流;ix为负载电流。由式(2)可知,中线电感的存在使得变流器在abc坐标系下存在耦合[15]。在负载平衡时,由于三相电流平衡,因此耦合可以忽视,但在不平衡工况下,三相电流不平衡,耦合不可忽视。图3所示为实现解耦控制,将式(1)~式(3)根据变换矩阵[15]变换至αβ0坐标系下,abc坐标系和αβ0坐标系的关系示意有
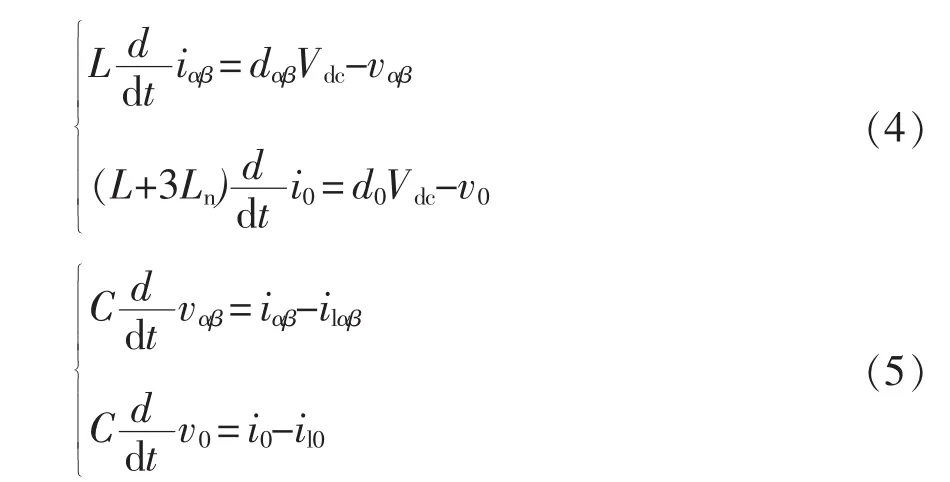

图3 abc坐标系与αβ0坐标系关系示意Fig.3 Relationship between abc coordinate and αβ0 coordinate
式中:[dα,dβ,d0]、[vα,vβ,v0]、[iα,iβ,i0]和[ilα,ilβ,il0]分别为电压占空比、输出电压、电感电流和负载电流在αβ0坐标系下的向量。在αβ0坐标系下,三相四桥臂逆变器的数学模型不存在耦合,整个系统可以视为3个等效的单相逆变器,简化控制策略。
由于在αβ0坐标系下采用PI控制器不能达到良好的效果[15-18],本文采用准比例谐振(quasi proportional resonant)控制器,准比例谐振控制器传递函数为

式中:kp为比例系数;kr为谐振系数;ω0为谐振角频率;ωc为截止频率。
kp=1,kr=100,ω0=800 π rad/s时,不同 ωc下准比例谐振控制器的波特图如图4所示。由图可以看出,ωc的取值对控制器的带宽有影响,随着ωc的增大,带宽也增大。三相四桥臂逆变器在αβ0轴坐标系下的控制框图如图5所示。零轴与α、β轴的不同之处在于等效电感的不同,Lαβ=L,而 L0=L+3Ln,图5中,Gv为电压控制器,r为考虑电感的寄生电阻、开关管的导通压降以及死区效应等因素后的等效寄生电阻。
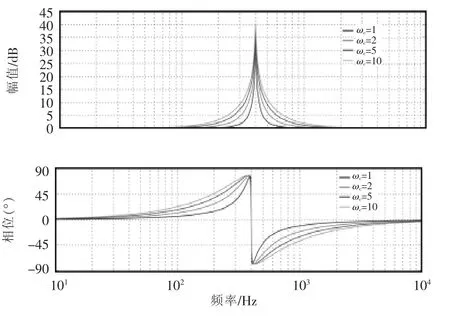
图4 准PR控制器波特图Fig.4 Bode plot of quasi PR controller
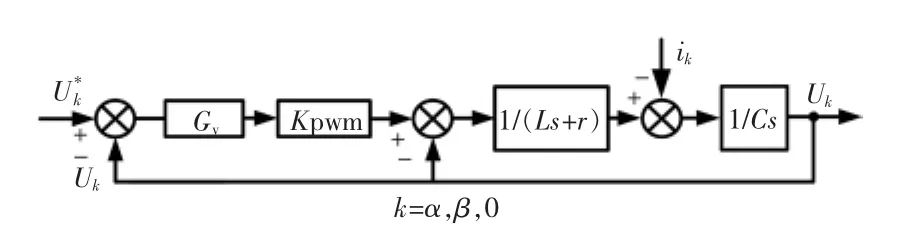
图5 αβ0轴电压控制框图Fig.5 Control block diagram of voltage on αβ0 axis
2 基于虚拟负阻抗的分散逻辑控制策略
2.1 分散逻辑控制策略原理
图6为本文采用的分散逻辑控制方案。并联系统内每台变流器采集自身输出的电压和电流信号,计算本机输出的平均有功和无功,将本机有功和无功功率信号P、Q以占空比的形式发送到有功和无功功率母线上,通过逻辑“与”/“或”运算得到最大有功/无功功率的占空比波形,送至各逆变器后将占空比还原成有功和无功数值作为并联系统的功率参考值P*、Q*,通过分散逻辑控制器实现系统有功和无功的均分[19]。分散逻辑控制器如图7所示,用闭环PI控制器对有功和无功功率参考值进行无差跟踪,有功功率控制的输出叠加到电压控制器的参考值上,无功功率控制的输出叠加到相位控制的参考值上,经过控制器的调节作用最终实现系统有功和无功的功率均分。
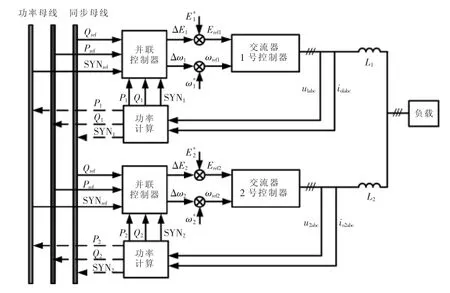
图6 分散逻辑控制原理示意Fig.6 Schematic of distributed logic control principle

图7 分散逻辑控制器Fig.7 Distributed logic controller
2.2 虚拟负电阻控制策略
并联系统接入不对称负载时,线路阻抗的存在,会造成并联系统公共点的电压不对称,影响供电质量,本文采用虚拟负电阻方式减小系统的线路阻抗以降低公共点的不平衡度。传统虚拟阻抗是一个正数,大多用于下垂控制策略中,以改变线路的阻抗特性,使有功和无功能够解耦,但是“正”虚拟阻抗的加入在不平衡负载的应用场景中会增大线路的不平衡压降,加剧并联点的电压不平衡度。而本文采用的虚拟负电阻是一个负数,旨在抵消线路上的电阻,能够有效降低线路上的不平衡压降,改善并联点的电压质量。
并联系统阻抗Zs包括逆变器输出阻抗Zout以及线路阻抗Zline,表示为

其中,Zline=Rline+jXline,Rline表示线路电阻,Xline表示线路电感。
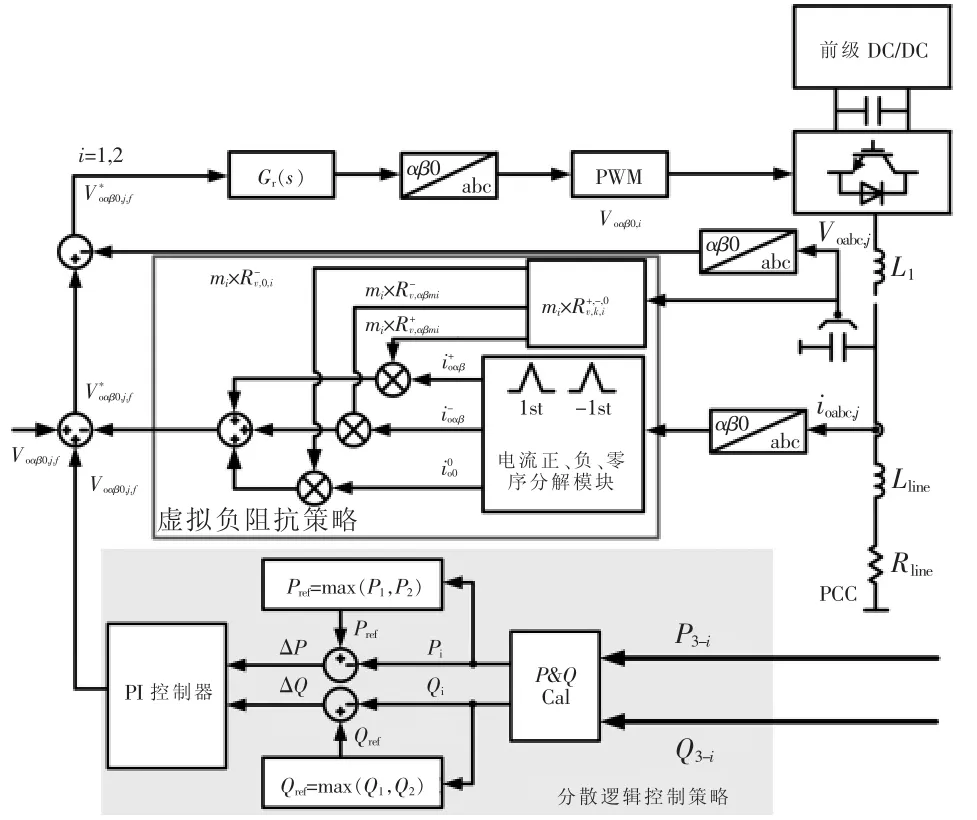
图8 基于虚拟负电阻的并联系统控制策略框图Fig.8 Block diagram of control strategy for parallel system based on virtual negative resistance
本文基于虚拟负电阻的并联控制策框图如图8所示,逆变器通过硬件采样电路采集公共并网点的电压和电流信息,计算此时并网点电压的不对称度 mi(i=1,2),将正、负、零序的电流分别与虚拟负电阻作乘积表示正、负、零序,i=1,2),并叠加至电压控制环的电压参考值上。电压控制环的参考值由三部分构成,第一部分是输出额定电压的参考值,第二部分是并联功率控制模块输出,第三部分是虚拟负电阻前馈补偿。
根据IEEE 936-1987标准,定义不平衡度和加入虚拟负电阻的系统阻抗分别为
式中:Va,i、Vb,i、Vc,i分别为第 i台变流器的 A、B、C 相电压;为 αβ0 轴下的正、 负、 零序虚拟负电阻。虚拟负电阻的大小随着系统的不平衡度动态变化,当系统的电压不平衡度增加时,电阻增加;当系统不平衡度减小时,电阻相应减小。经过动态调节,系统电压平衡度最终达到预期目标。虚拟负电阻的本质是补偿线路的压降。特别需要注意的是,由式(4)可知,系统零轴的阻抗是其他轴的4倍,因此零轴的负电阻也应该为其他轴的4倍,即才能起到较好的控制效果。本文电压不平衡补偿目标为不平衡度mi≤2%。
3 实验验证
在实验室搭建了2台三相6 kVA的并联逆变器组成的微网供电系统实验平台,系统的参数如表1所示,进行相关负阻抗策略实验验证。

表1 系统参数Tab.1 System parameters
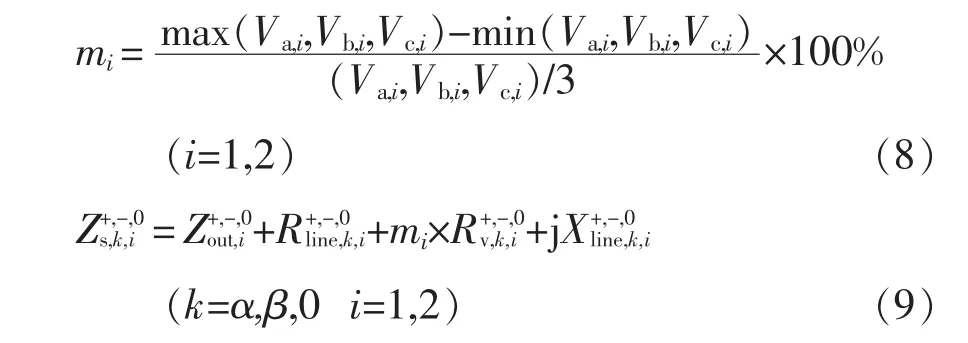
并联系统接三相不对称负载,A相接1 kW阻性负载,B、C两相接2 kW阻性负载。图9为未采用虚拟负阻抗时并联系统中2台逆变器A、B和B、C相电压和电流波形。由于线路存在阻抗,A相流过的电流小于B、C两相,因此降落在A相线路上的压降低于其他两相,导致三相电压出现不对称,经过计算分析,三相的电压不平衡度大约4%,两台逆变器的负载不均分度<10%。图10为采用虚拟阻抗后的并联系统中2台逆变器A、B和B、C相电压和电流波形。对比图9和图10可以明显看到,由于减小了系统的阻抗,三相的不平衡电压降落都得到一定程度地减少,三相电压不平衡度降低至1.8%,证明了所提出策略的有效性。
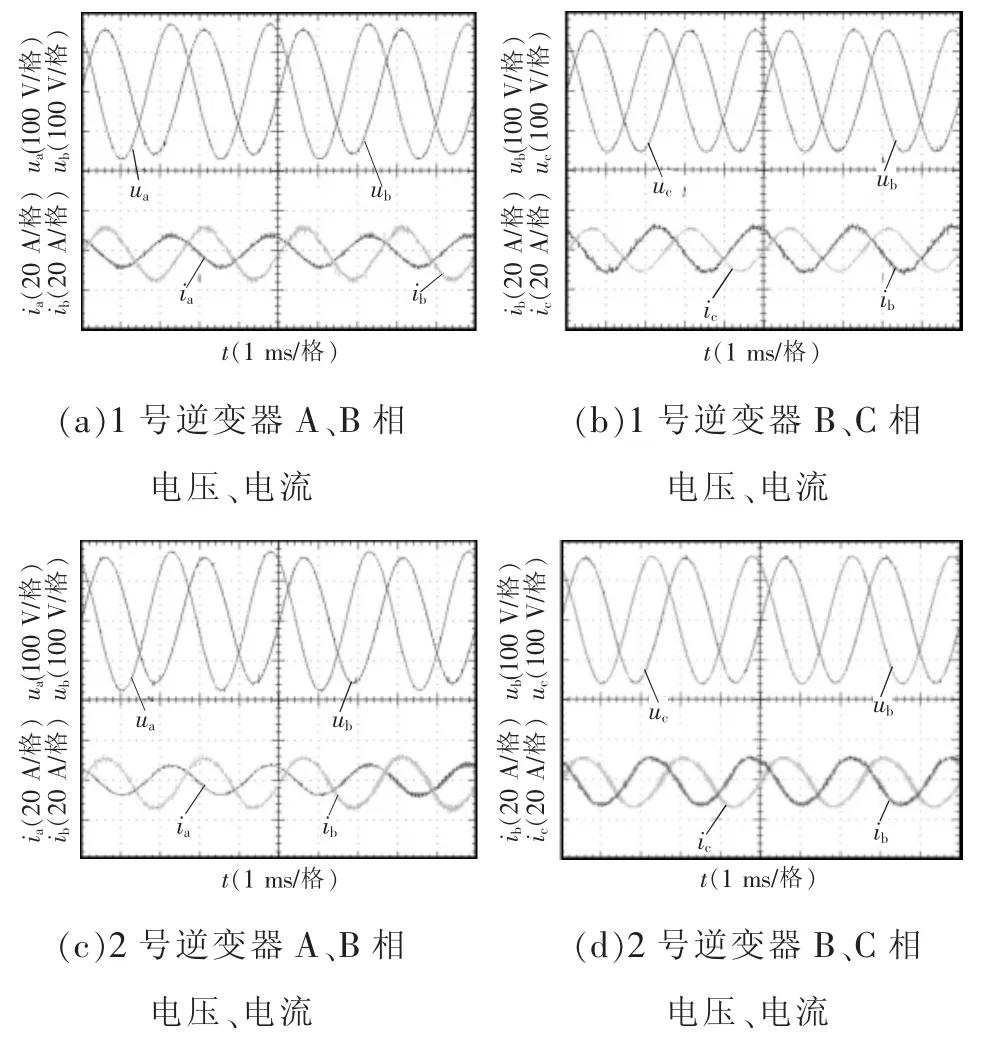
图9 未采用虚拟负电阻策略时系统的电压、电流波形Fig.9 Voltage and currentwaveformsofthesystem without virtual negative resistance strategy
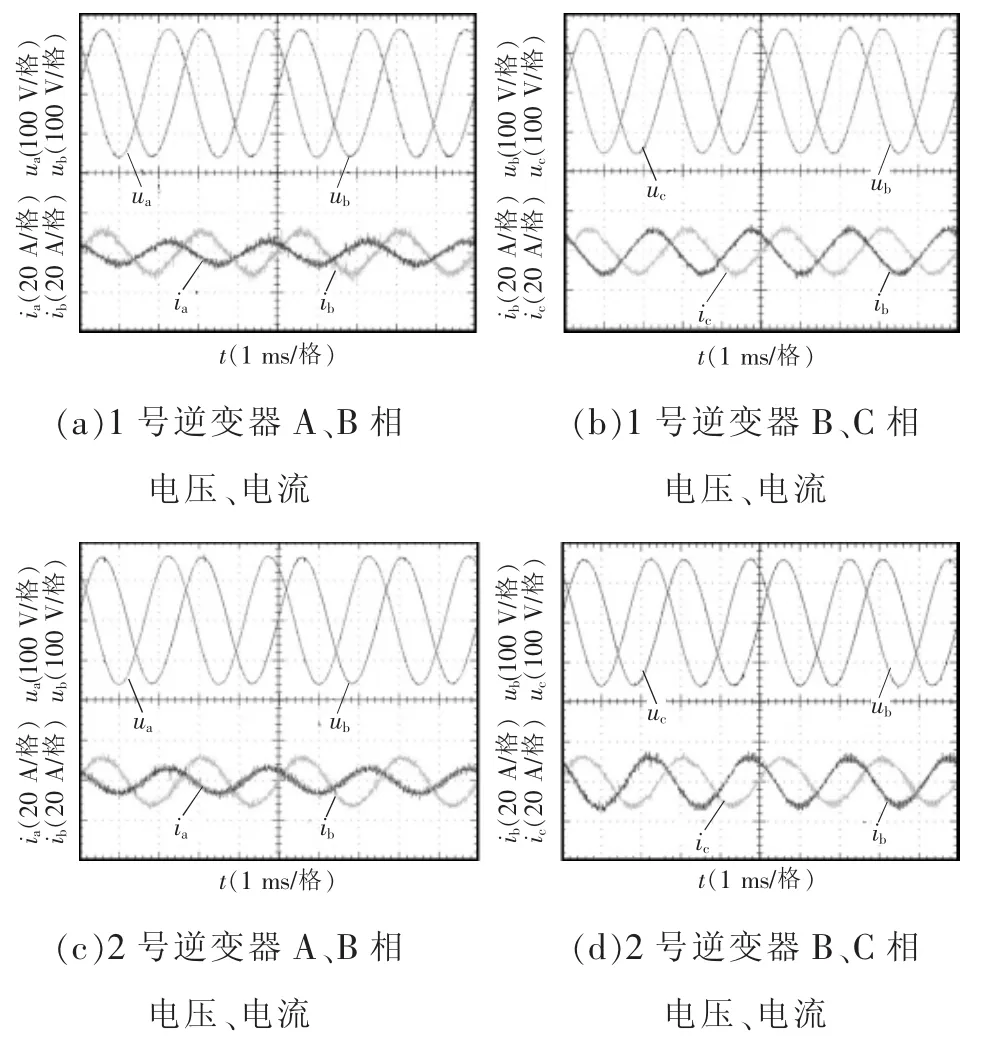
图10 采用虚拟负电阻策略时系统的电压电流波形Fig.10 Voltage and current waveforms of the system under virtual negative resistance strategy
4 结语
本文研究了航空静止变流器并联系统的控制策略,采用三相四桥臂变流器拓扑作为并联系统的基本单元,建立其在αβ0坐标系下的模型,并采用准比例谐振控制器作为单机的电压控制策略。针对多机组成的并联系统,采用分散逻辑控制策略对并联系统的功率进行均分,针对不平衡负载下由于并联系统的阻抗带来的三相不平衡,提出了改进的虚拟阻抗策略对不平衡电压进行补偿,实验结果证明了这种控制策略的有效性。