基于神经元自适应PID的交流永磁同步电机仿真研究
2018-08-17陈帅王海姚刚
陈帅 王海 姚刚
(安徽工程大学,安徽 芜湖 241000)
由于低惯量、高效率、高功率/扭矩密度和高可靠性,永磁同步电机(Permanent Magnet Synchronous Motor,简写为PMSM)驱动在工业机器人领域应用非常广泛,并取代了直流和感应电机。永磁同步伺服电机在应用过程中需要根据工作环境的不同而对其控制系统的参数进行调整,但在参数调整的过程中,若参数调整不当,电机会发生剧烈的抖动或飞车现象,尤其在工业现场调试的过程中会对现有机械结构造成很大破坏,甚至会对工作人员的人身安全产生威胁。传统PID控制器会因为工作坏境和对象的复杂性,导致控制器不能满足系统要求,因此,建立有效的伺服电机控制系统具有非常重要的意义。
在这方面,国内外专家学者做了大量研究。Mehmet Zeki Bilgin等提出了一种用于永磁同步电机速度控制的自校正神经PID控制器,并用MATLAB仿真了该系统[1]。Yasser Abdel-Rady Ibrahim Mohamed设计了一种简单自适应扰动观测器的永磁同步电动机鲁棒电流控制方案,并进行了实验验证了方案的有效性[2],杨平等对永磁同步电机(PMSM)控制系统的速度和电流双闭环PID控制系统进行了研究[3],罗文明等将结合了模糊规则的模糊PID控制器应用于交流永磁伺服电机,并进行了仿真验证控制效果[4]。
本文通过对永磁同步电机数学模型的分析和对神经元PID控制算法的研究,设计了一种基于神经元自适应PID控制的PMSM伺服控制系统模型。其中,根据数学模型中的坐标变换公式设计了坐标转换模块,根据矢量控制中的id=0电流控制原理,应用滞环电流跟踪方法,进行PWM逆变控制。同时将神经网络学习算法与传统PID控制结合建立了神经元自适应PID控制算法,并应用于伺服控制系统中。
1 交流PMSM的数学建模
1.1 永磁同步电机解析模型
PMSM是绕线式同步电机发展而来,它不需要励磁线圈、电刷与滑环,而是用永磁体的性能优势,其定子电流基本类似绕线式同步电机,使用正弦交流电作为输入,所以称它为交流永磁同步电机。其主要结构有定子和转子两部分,根据其结构特点构建的解析模型如图1所示。图1中ua,ub,uc为三相定子电压;ia,ib,ic为三相定子电流;Ra,Rb,Rc为定子绕组电阻,Ra=Rb=Rc;ω 是同步电角速度,La,Lb,Lc为定子绕组自感,Mab,Mbc,Mca为绕组间互感;θ为转子q轴与a相轴线夹角,此夹角即是a相绕组轴线和永磁体基波磁场轴线之间的电角度。
1.2 永磁同步电机数学模型
在建模过程中,我们一般不考虑铁心饱和效应的影响,并且认为三相绕组完全对称,永磁体气隙磁场呈正弦分布,由铁心的磁滞效应引起的磁滞损耗和磁通引起的涡流损耗亦被忽略不计,转子上的永磁体无阻尼且转子上无阻尼绕组[5]。则交流永磁同步电机的三相静止坐标系a-b-c下的电压平衡方程为:


图1 永磁同步电机解析模型
ψma,ψmb,ψmc代表定子三相绕组交链在各相绕组的永磁磁链。定义自感均值为L0,定子绕组自感的振动幅值为L1,则一般电感方程可以写成以下式:

三相交流电机是一个耦合的多变量系统,具有很强的非线性,描述其在三相静止坐标系里用数学模型难度大,且因其系统阶次高,通过传统的控制策略直接进行交流调速难度太高,因此一般应用矢量控制的方法来提高三相交流电机的控制性能,最为常用的是采用坐标变换,在两相同步旋转坐标系中对三相交流绕组进行描述,实现等效变换,通过等效变换会产生相等的磁动势,而系统的变量之间也因此可以部分的解耦,数学模型的建立大大简化,也因此简化了系统的分析和控制,得到的数学模型类似于相对简单的直流电机。在功率和磁动势均相等的等效原则下,两相坐标系与三相坐标系中合成后的磁动势相等,三相绕组的电流在d-q坐标轴上投影为:

式中id,iq是定子电流的d-q轴分量;由变换之后总功率保持不变,可知匝数比应为:

又因为ia+ib+ic=0,可得:

由式(1)和(6)可得d-q同步旋转坐标系下的电压方程为:

ψf代表永磁体磁链,i0为零序分量,只要考虑坐标系中的直轴、交轴的分量即可,i0与机电能量转换无关。d-q坐标系中三相永磁同步电动机的定子绕组自感方程为:

由式(6)~(8)可得d-q坐标系中三相永磁同步电动机的定子侧电磁转矩为:

np代表极对数,Ld< Lq。
用 TL作为扰动输入,F为转子与负载之间的粘性摩擦系数,ud、uq、ψf作为输入变量,id、iq、ω 作为状态变量,那么可得到PMSM的状态方程:

从PMSM的数学模型可以看到,在电机确定的情况下,电流决定了转矩输出,对电机电磁转矩的控制即是对交、直轴电流的控制,即电流控制方法。PMSM矢量控制的电流控制方法主要有:id=0控制、最大转矩电流比控制、通过d轴电枢反应的去磁效应来实现的弱磁控制和寻找电流最佳大小和相位的最大效率控制等。PMSM目前应用最广泛的控制方法是id=0,即保持d轴电流为0,此时的电流矢量会根据负载状态的变化在q轴上移动。在相同负载转矩下,所需的定子电流最小,此外,因id=0,即直轴不会有电流,不会降低永磁体性能。此控制方式使电流均用来产生电磁转矩,没有额外的能量消耗。当id=0时,电磁转矩方程变为:

2 神经元自适应PID控制模型
在工程实际中,应用最为广泛的控制规律为比例(Porprotional)、积分(Integral)、微分(Differential)控制,简称PID控制。PID控制结构简单、鲁棒性强、可靠性高,但在控制较复杂、非线性度高及有纯滞后的系统中,PID参数整定成为一个关键问题。神经网络具有自学习、容错性、强鲁棒性、联想记忆、逼近非线性关系等特点。本文将两者结合起来形成具有自适应的神经元PID控制器并将其应用到交流永磁同步伺服电机电流控制系统中[6]。
2.1 单神经元模型
对人脑神经元进行抽象简化后即可得到人工神经元模型,如图2所示。其中x1,x2,…xn为某个神经元收到的刺激信号,其连接强度为ω1,ω2,…ωn,称之为权。通过特定的运算把刺激信号与权值结合起来,即可得到净输入,该过程引起神经元的状态变化,其输出为

其中函数f(*)称之为激活函数,θ称之为阈值。
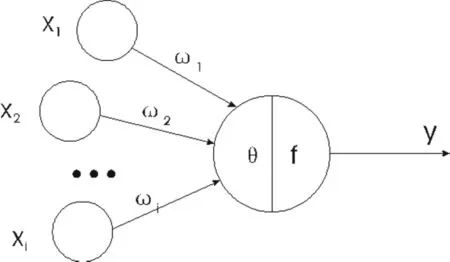
图2 单神经元模型
2.2 神经网络学习规则
学习是神经网络的一个主要特点,修正神经元之间的权值的运算,使得到的信息能适应运算环境的变化,在学习的过程中,运用学习规则,不断地修正权值。常用的学习算法可分为有监督的Delta学习和无监督的Hebb学习规则[7]。无监督的Hebb学习是一种相关性学习,它根据神经元互相关联的激活程度改变权值,如果神经元同时被激发,则这两个神经元之间的联系程度增强,用Oi表示第i个神经元的输出,Oj表示第j个神经元的输出,ωij表示两个神经元的加权系数,则Hebb学习规则可用式(13)表示:

η代表学习速率。
将Hebb学习规则中引入导师信号,将上式中的一个神经元输出换成期望输出和实际输出的差值,即为有监督的Delta学习规则,如式(14)所示:

式中di(k)为期望输出。本文即采用基于有监督的Delta学习规则的神经元自适应PID控制器。
2.3 神经元自适应PID
神经元自适应PID控制器原理如图3所示,参考量为yr(k),输出为y(k),神经元学习控制所需要的状态量 x1(k)、x2(k)、x3(k)需要经转换器进行转换,其中:

神经元通过关联搜索来产生控制信号,即


图3 神经元自适应PID控制系统结构
式中,ωi(k)为对应于 xi(k)的权系数,k为神经元的比例系数,且 k>0。Delta学习规则亦可称为连续感知器学习规则[8-9],是一种简单的有监督学习算法,该算法通过神经元的实际输出与目标输出误差对连接权值进行调整,将有监督的学习算法Delta学习规则规范化,即

式中 kp、ki、kd分别为比例、积分、微分学习速率,z(k)为递进信号。对比例(P)、积分(I)、微分(D)分别采用了不同的学习速率以便对不同的权系数分开调整。k值和初始加权系数的选择十分重要,初始k值太大会产生大的超调量,k值选择偏小,控制过程变长,当被控对象有延迟时,应适当减小k值,避免系统振荡。
3 Simulink系统模型
利用MATLAB/Simulink环境中的SimPowerSystems模块库[10],进行交流永磁同步电机数学模型的分析后,建立交流伺服控制仿真模型,系统的整体流程框图如图4所示,运用神经元自适应PID算法和位置、速度、电流三闭环控制方法,提高了系统的控制性能。
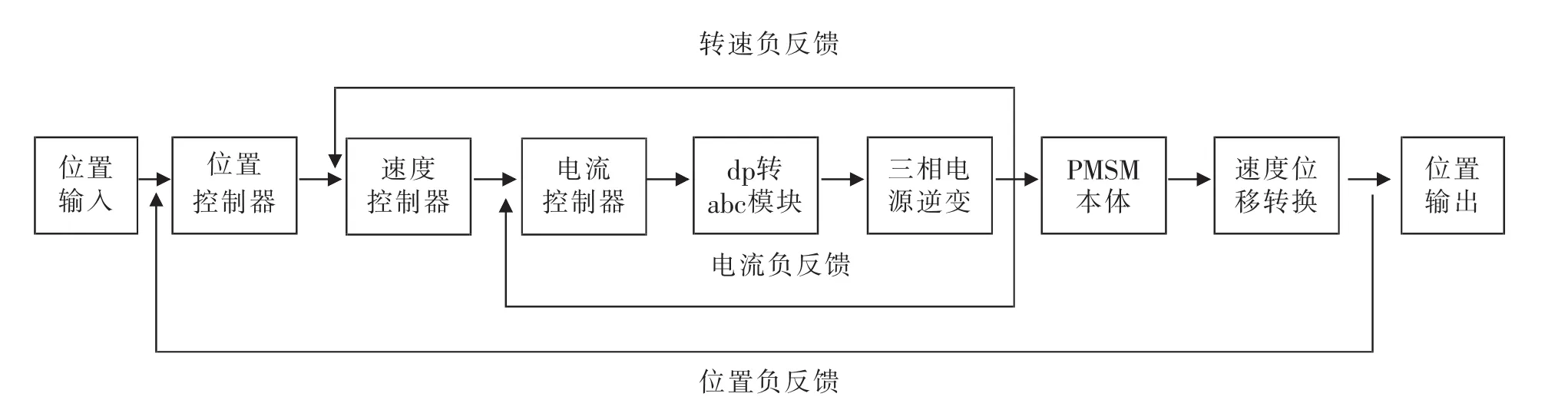
图4 系统流程框图
系统的基本部分由永磁同步电机(PMSM)模块、电压型PWM逆变器模块、坐标转换模块及电流、速度、位置控制器模块构成。永磁同步电机的控制与驱动是三闭环系统,并运用了神经元自适应PID算法对电流环进行了优化,期望转矩直接确定了永磁同步电机的q轴电流,d轴电流定为id=0,由式(8)和(9)可知,此时电枢电流最小。将图4所示的整体系统流程图在Simulink中分模块建立模型,并进行整合与参数设置,在Simulink中构建出了如图5所示的系统整体仿真模型。其中系统给定电机转角为30°,系统在t=0时刻,加入负载转矩Tm=3N*m,仿真时长设定为0.5 s,求解器类型设置为可变步长。

图5 系统整体仿真模型
4 仿真结果
本文运用MATLAB/Simulink进行了系统的仿真模型构建,采用了id=0电流控制原理。将传统PID控制与神经元自适应PID控制分别应用到交流永磁同步电机的电流控制器,对比不同控制方法下电机的位置、速度、电流和转矩输出。
永磁同步电机模块的参数设置如表1所示,电机在启动的同时加入负载转矩Tm=3N*m,给定电机转角30°,自适应PID算法的参数为kp=30,ki=3.5,kd=4,k=0.8。由图6和图7可以看出电机在有负载启动的瞬间,三相定子电流会产生突变,之后逐渐进入稳定状态,同时可以看出,在有负载启动阶段,神经元自适应PID控制无明显超调,且调节时间相较于传统PID控制短了0.015 s,有效地减少了电流震荡,更快的进入稳定状态,可以有效的消除电机运行过程中的振动,增加了系统的稳定性。
由图8可以看出启动阶段速度很快上升,当转子的转角接近30°时,神经元自适应PID控制相较于传统PID控制快速性较好,速度调节过程中速度变化量小,比传统PID快了0.015 s进入匀速阶段,可有效地提高电机响应速度。结合图9可以看出当转子的转角接近30°时,转子的转速也开始逐渐降低,当转角达到30°时,转速同时减为0 rpm即电机停止工作。

表1 永磁同步电机模块参数设置表
由图10可以看出电机在启动时,神经元自适应PID控制的转矩相较于传统PID要快0.015 s进入稳定输出状态,加速阶段转矩输出稳定性更好,同时电机的整个运行过程变化量均在较低的范围内,能快速稳定的达到既定的转角。

图6 神经元自适应PID控制定子输出电流
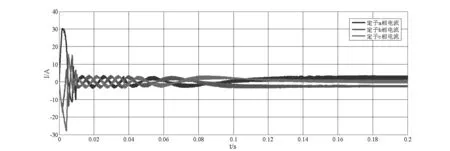
图7 PID控制定子输出电流
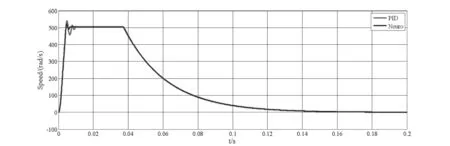
图8 转速输出比较

图9 位置输出比较

图10 转矩输出比较
5 结论
本文将神经元自适应PID控制应用于PMSM上,通过仿真证明在电机负载变化时可以有效地减少系统的调节时间,增强系统的稳定性与抗干扰能力,神经元自适应PID控制相较于传统PID控制具有自适应能力和更强的鲁棒性,可以提高系统的控制精度,有效地降低电机在运行过程中的振动。