装配式建筑专用塔机研究
2018-08-16赵天雪
赵天雪,王 刚
(1. 沈阳建筑大学 机械工程学院,辽宁 沈阳 110168;2. 中建三局集团有限公司,辽宁 沈阳 110000)
装配式建筑已经成为建筑施工的重要组成部分,未来还将进一步发展。目前,装配式建筑施工普遍采用普通塔机进行吊装作业,在构件装配过程中,工人需要在建筑物顶部以人力对构件进行调位,这不仅增加了工人的劳动强度,而且还存在着一定的人身安全风险。为了解决这一问题,文章研究了装配式建筑构件吊装施工专用塔机。这种塔机不仅能将构件调运到施工现场,还能够对构件的空间位姿进行调整,使之与现场装配的需求相适应。
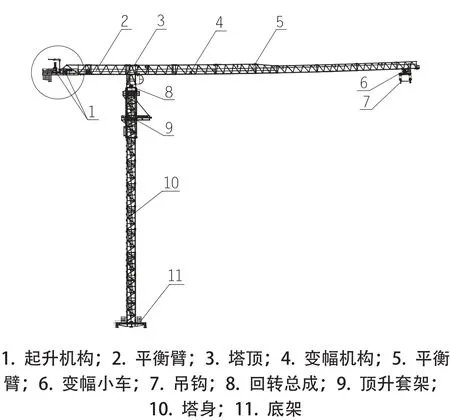
图1 装配式建筑用塔机组成
1 装配式建筑用塔机组成与特点
装配式建筑用塔机的组成如图1所示,主要由2个起升机构、平衡臂、塔顶、变幅机构、起重臂、变幅小车、吊钩、回转总成、顶升套架、塔身以及底架等组成。
从表面看这种塔机与普通的上回转塔机没有本质差异,但其装配的2个起升机构和变幅小车的新型功能使得这种塔机与普通塔机形成了作业性能的不同。其2个起升机构构成的2套起升系统和具有回转功能的变幅小车使其形成了与普通上回转塔机的根本不同,下面分别进行介绍。
1.1 双起升机构
图2所示是布置于平衡臂尾部的2个起升机构,其中1个机构置于靠近配重的尾部平台上,其电机采用直立式安装;另1个置于桁架中底平面上,其电机采用卧式安装,使得这2套机构能够与平衡臂空间位置相适应。另外,这2套起升机构具有相同的工作特性,均采用变频调速电机,通过PLC系统控制2个机构的变频器,使2个机构能够实现同步起升和异步起升,得以实现所吊运构件的起升、下降运动和调姿摆动。另外,这2个机构前低后高放置,既有利于起升钢丝绳的排布,也能够避免2个机构起升钢丝绳之间发生干涉。而且平衡臂后部平台的提升,也有利于改善平衡臂尾部的受力状态。
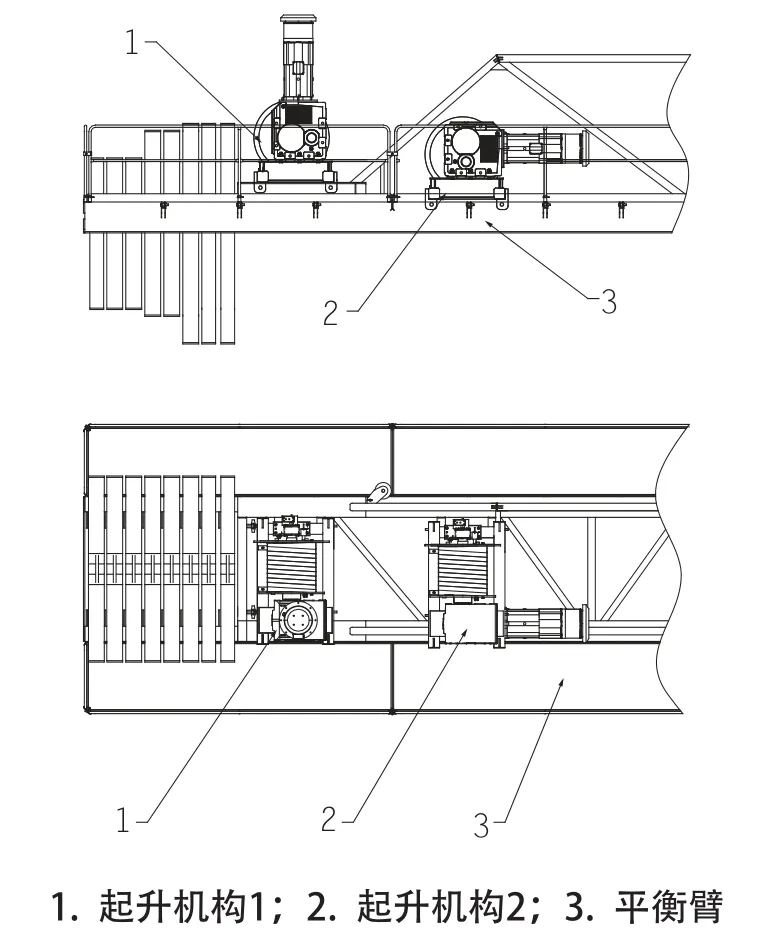
图2 双起升机构在平衡臂上的排布
1.2 带回转功能的变幅小车
正常的塔机变幅小车没有回转功能,本文所研究装配式建筑用塔机的变幅小车带有回转功能,如图3所示。图3(a)是小车构造图,图3(b)是小车拆解图。变幅小车包括上车、回转支承、回转驱动机构、回转角度传感器、下转台和回转梁等。
上车构造与普通小车基本相同,只是在下部安装有回转支承装置。上车有2个起升绳导入滑轮和2个起升绳导出滑轮。下车由下转台和回转梁组成,回转梁置于下转台的下部,并随下转台回转。回转支承装置用于连接上、下转台,回转机构和回转角度传感器均布置于下转台上,并随下转台回转。在回转梁上布置有起升绳导向滑轮,在回转梁回转时通过起升钢丝绳带动起升横梁一起回转。根据吊运工作的实际情况,小车上的下转台只需要进行±900°回转,与塔机主机回转及变幅运动相结合,就能够使所吊运构件在吊运空域内的任意位置呈现出所需要的姿态。回转角度传感器可以通过无线传输将小车下转台的相对回转角度同步传入司机室的中央控制台,以监视和控制回转梁的回转角度。
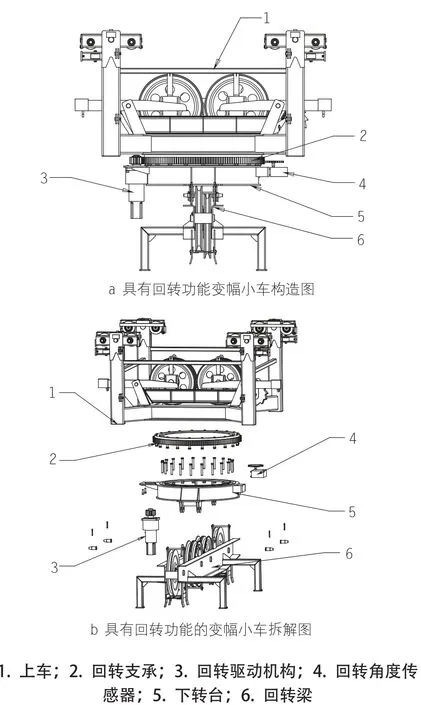
图3 带回转功能的变幅小车
1.3 双起升系统原理
图4 所示为2套起升系统排布方式,这2套起升系统分别为a系统和b系统。2套系统的起升机构都是由同1个PLC控制运行,可以实现构件起吊横梁水平起升和下降以及该横梁不同方向的倾斜。在该横梁上装有回转角度传感器,可以直接将横梁的倾斜状态传递到PLC控制系统,通过调整使2个机构在运行中保持横梁的倾斜状态满足吊装要求。图4中4a和4b是2个独立的起重量限制器,其载荷信息随时传递到起升机构控制系统。图中6a、6b、7a、7b、8a和8b是固定在变幅小车回转梁上的导向滑轮,通过回转梁的回转,可以带动起升横梁13回转,从而实现所吊运构件的回转运动。当需要起升横梁倾斜时,可以通过2个起升机构同步和异步工作进行实施。
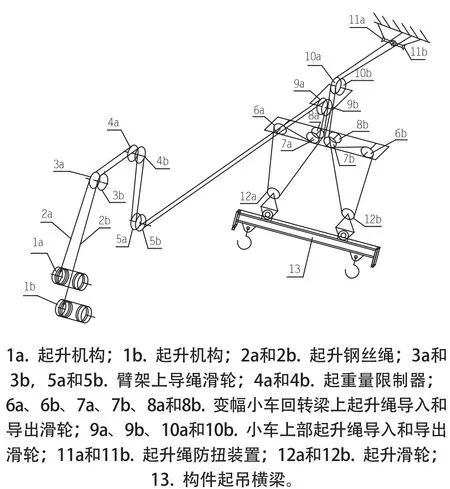
图4 双起升系统原理图
2 变幅小车设计中的技术问题
变幅小车需要选择回转支承和回转驱动机构。回转支承所受到的偏心力矩不大,能够满足起吊重物和吊具等重量的载荷就可以。而小车上的回转机构应该越小越好,以减轻小车整体的重量。小车回转驱动机构应该能够克服小车回转部分所产生的阻力矩。小车回转系统的回转阻力矩包括回转支承的摩擦阻力矩、起升钢丝绳抗扭刚度形成的回转阻力矩和回转惯性阻力矩。因为风载荷所能够形成的阻力矩不会有明显作用,所以可以忽略。回转支承的摩擦阻力矩Mf可以采用如下方法计算

式中 Pq—— 下转台、吊重、吊具和钢丝绳等产生的垂直载荷;
α——滚动体与滚道的接触角;
μ—— 滚动综合摩擦系数,滚球式取0.006~0.003,滚珠式取0.01;
D0——回转支承装置滚道中心直径。起升钢丝绳抗扭刚度形成的回转阻力是正常回转中所没有的。这一回转阻力与钢丝绳的结构形式、直径、钢丝绳受扭部分的长度、钢丝绳所受到的拉力和钢丝绳的旋向有关。由于目前尚无法从钢丝绳产品样板等资料中查取有关钢丝绳的抗扭刚度参数,在本项目的研究中选取了3种钢丝绳进行抗扭刚度实验。
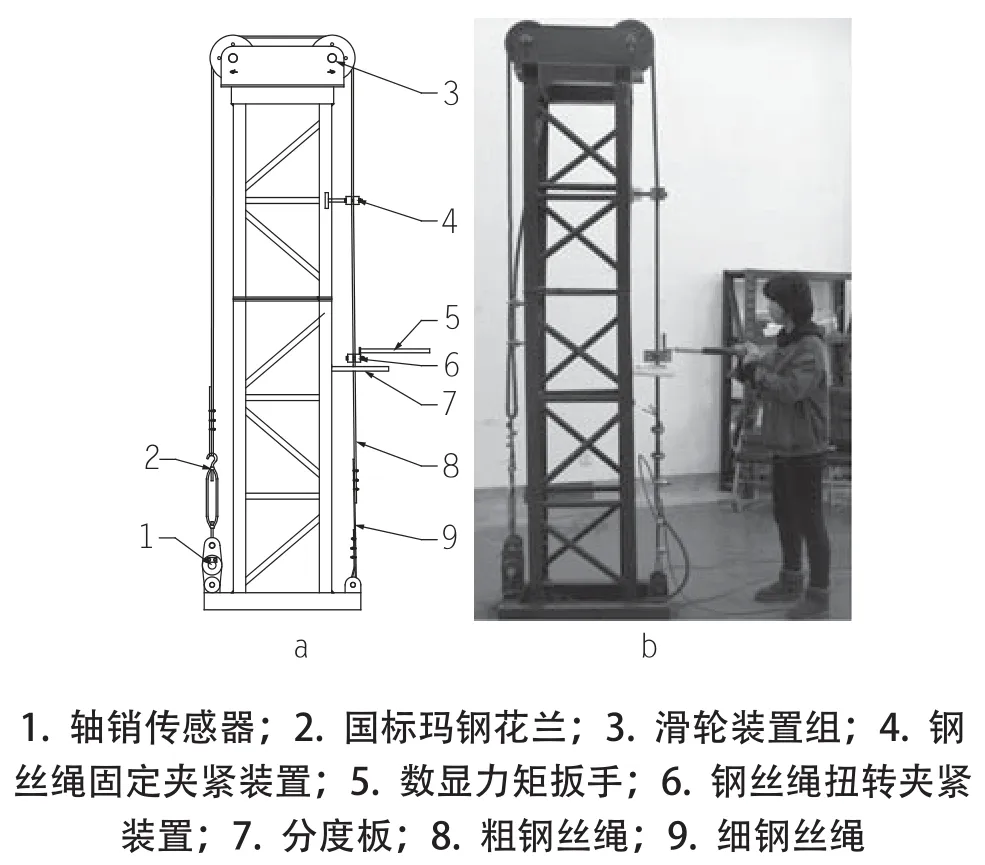
图5 实验原理图
这3种钢丝绳分别是:钢丝绳6×19+FC-16,钢丝绳6×19+FC-18,钢丝绳34×7+IWS-20。实验采用的3种钢丝绳直径为16mm的和20mm的为右旋,钢丝绳直径为18mm的是左旋。钢丝绳旋转受扭转的角度为-90°到90°范围内,角度正值表示旋转角与钢丝绳股的旋向相同,角度负值为与钢丝绳股的旋向相反。
图5(a)是实验系统原理图,图5(b)是实验现场照片。实验中钢丝绳的一端通过国标玛钢花兰连接到轴销拉力传感器上,另一端用细钢丝绳进行固定。在有细钢丝绳固定的一侧上部装有钢丝绳夹紧固定装置,在距离钢丝绳固定夹紧装置下部0.8m处有钢丝绳用于扭转钢丝绳扭转夹紧装置。扭转夹紧装置的下部是用于张紧的细钢丝绳。实测显示细钢丝绳的抗扭力矩很小,可以忽略不计。实验用的数显力矩扳手是ADEMA ADA40200,扳手力矩范围为10~200N·m,实测为5~200N·m。拉力传感器是H9X2型轴销传感器,信号检测仪器是DH3820静态应变测试系统。该实验装置模拟回转小车上部起升钢丝绳绕入和绕出滑轮到小车下部回转梁上起升钢丝绳绕入和绕出滑轮之间起升绳的抵抗扭矩,就是图4中滑轮9和10与滑轮7和8之间钢丝绳的抗扭转力矩。
在钢丝绳固定夹紧装置放松状态下,通过调整玛钢花兰改变钢丝绳张紧力,由DH3820系统对拉力值进行监测,在不同张紧力状态下对钢丝绳抗扭力矩检测。通过对2种直径钢丝绳不同方向旋转实验,得到了抗扭转力矩Mn(N·m)值。表1和表2是直径18mm钢丝绳正向和反向扭转时抗扭力矩值,表3和表4为直径20mm钢丝绳正向和反向扭转时抗扭力矩值。
表1是直径18mm钢丝绳正向抗扭力矩,从表1中数据可以看出,在0~90°的范围内,钢丝绳的抗扭力矩与扭转角度几乎呈线性变化关系。钢丝绳的拉力小于6000N时,拉力对抗扭力矩有影响,随着拉力的增加而增加,当拉力达到6000N以后,拉力对钢丝绳的抗扭力矩几乎没有影响。
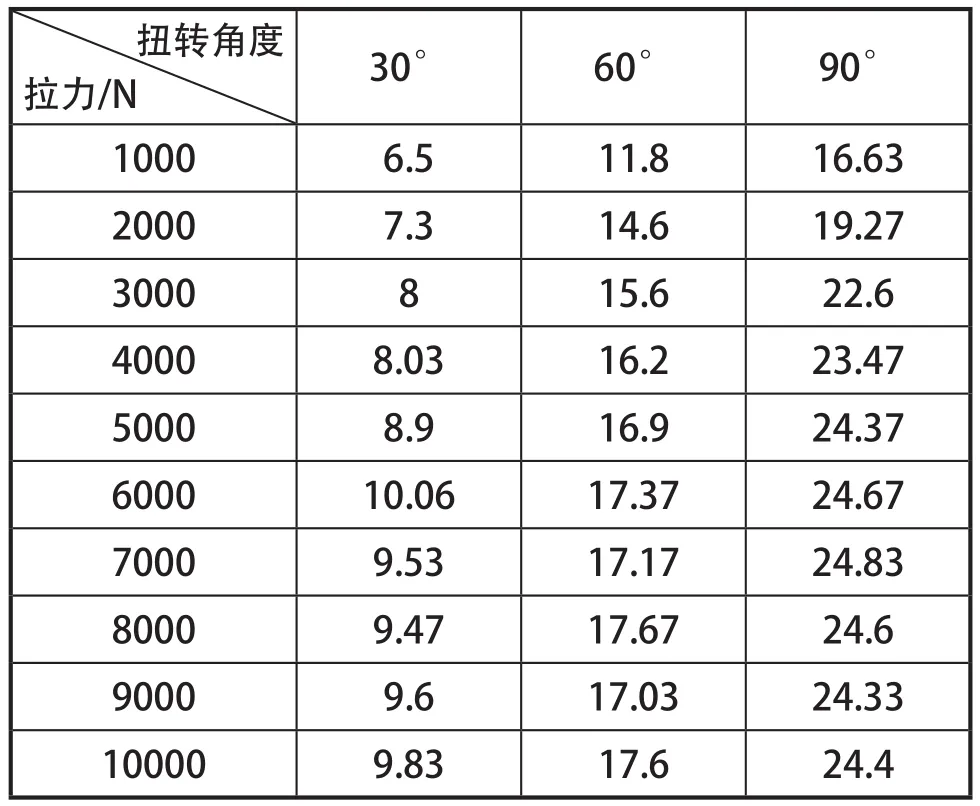
表1 直径18mm钢丝绳正向抗扭力矩(N·m)
表2是直径18mm钢丝绳反向抗扭力矩,从表2中数据可以看出,在0~90°的范围内,钢丝绳的抗扭力矩与扭转角度几乎也呈线性变化关系,但抗扭力矩值比正向扭转小许多。在5000N以下的所有扭矩相等,5000N及以上所有力矩相等,钢丝绳的拉力对抗扭力矩影响不大,在实验拉力范围内几乎可以忽略。
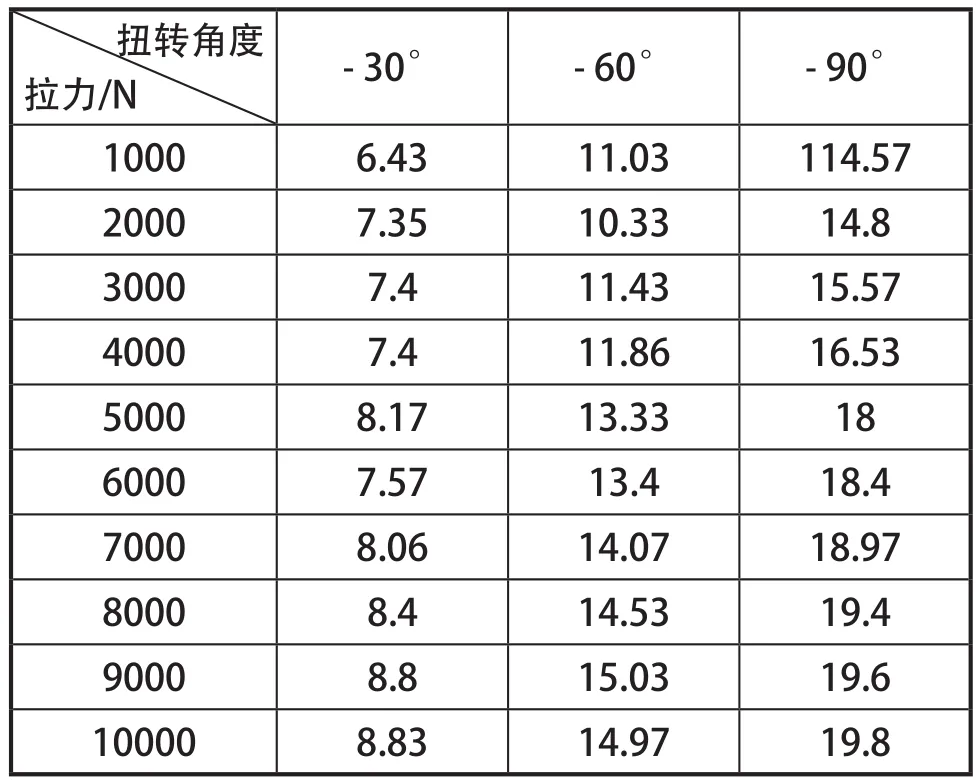
表2 直径18mm钢丝绳反向抗扭力矩(N·m)
表3是直径20mm钢丝绳正向抗扭力矩,从表3中数据可以看出,在0~90°的范围内钢丝绳的抗扭力矩与扭转角度几乎呈线性变化关系,但钢丝绳的抗扭力矩随着拉力的增加仍然呈现出继续增加的状态。
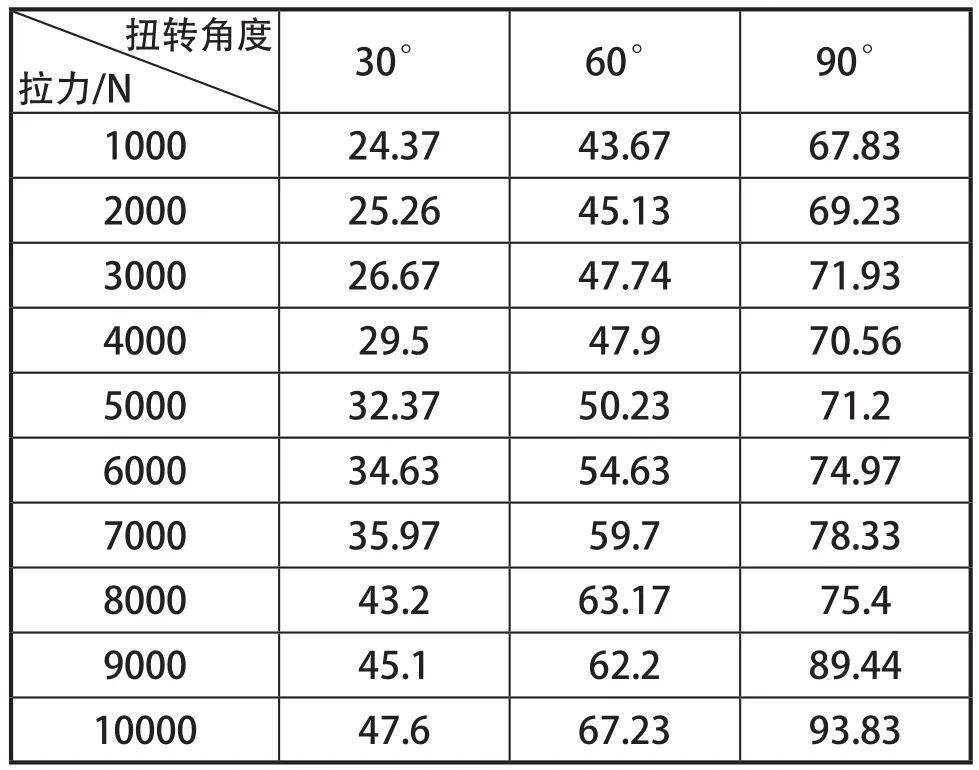
表3 直径20mm钢丝绳正向抗扭力矩(N·m)
表4是直径20mm钢丝绳反向抗扭力矩,从表4中数据显示,在0~90°的范围内钢丝绳的抗扭力矩与扭转角度几乎也呈线性变化关系,但抗扭力矩值比正向扭转小许多。拉力对抗扭力矩的影响似乎呈现为台阶式变化,但扭矩值几乎为正向扭转的1/3。
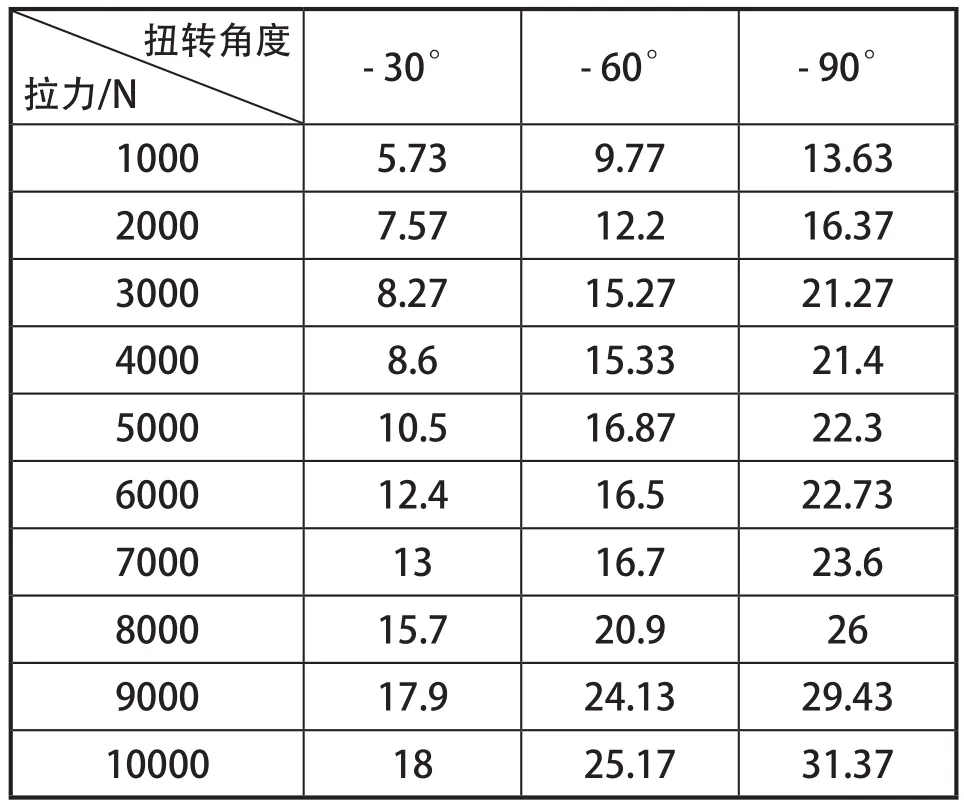
表4 直径20mm钢丝绳反向抗扭力矩(N·m)
综合上述4个表格的实验数据可以看出,20mm钢丝绳的抗扭力矩明显大于直径18mm的钢丝绳,反向抗扭力矩也明显小于正向抗扭力矩。根据数据预判钢丝绳拉力对抗扭力矩的影响应该只是在一定范围内,当拉力达到一定程度后,拉力将不会对抗扭力矩有明显影响。
在实际测试中发现,直径为16mm的钢丝绳在所测范围内扭矩非常小,所以实验数据没有列出。实验数据也会受到钢丝绳的类型和浸油程度的影响,所以还要进一步实验研究和理论分析。但本实验研究数据也能够基本反映钢丝绳的抗扭状态。
由于细钢丝绳相对于粗钢丝绳的抗扭刚度可以忽略,所以将所测结果直接作为起升钢丝绳的抗扭力矩。正常情况下在小车回转装置回转时,受扭钢丝绳有4根,为了减少受扭钢丝绳产生的扭矩,在本系统中利用2根从构件起吊横梁返回到臂端的钢丝绳,在回转梁上减少了1组导向滑轮,以提高钢丝绳的受扭长度,从而降低钢丝绳在扭转时的抵抗扭拒。另外在设计时,要适当提高小车上部导绳滑轮与回转梁上相应导绳滑轮之间的距离,以降低钢丝绳的扭转力矩和提高钢丝绳的寿命。此外,钢丝绳在发生扭转时,经过的上、下滑轮绳槽与钢丝绳之间如果有良好的润滑,也会发生一定的转动,从而减少上下滑轮之间钢丝绳相对扭转角,扭转力矩也会随之减小。但这一现象与钢丝绳在滑轮上的润滑状态有关,所以具有不确定性。另外,2套起升系统应选择不同旋向的钢丝绳,这样可以保证小车旋转机构在2个旋转方向上具有相等的驱动力矩,可适当降低驱动功率。
所吊运构件的回转惯性力属于动态载荷,在回转驱动电机选择时可以不考虑,回转电机的驱动功率只考虑回转支承的摩擦力和起升钢丝绳的抗扭转力矩2项即可。回转钢丝绳的抗扭转力矩因钢丝绳的不同有很大的差异,计算参数要以实验数据为准。则回转驱动机构的静功率计算方法为

式中 M—— 静态回转阻力矩,M=Mf+Mn;
N——回转速度;
η——回转系统效率,一般情况下取η=0.9。
3 结束语
文章所介绍的装配式建筑用塔机可以将所吊运的构件按照施工的需要进行位姿调整,免去了由人力调整构件位姿的过程。这不仅仅减少了工人的劳动强度,还能够提高装配过程中的安全可靠性。这一产品技术的出现将为装配式建筑的发展提供新的动力。
本文介绍的产品技术申请的国家专利已经公开,并且在所开发的PTT370和PTT460两个型号的塔机上得到了应用。
