基于KF和Ms算法的神经丝蛋白质自动跟踪性能比较
2018-08-15涂雪滢
涂雪滢
(新疆大学 机械工程学院,乌鲁木齐 830047)
神经丝是动物神经元中组成细胞骨架的重要元素,在人体表达神经丝时,过少或过量表达都会造成人体肌功能表达缺陷,导致机体神经退行性疾病,因此,跟踪研究神经丝运动路径十分重要[1]。本文主要研究的是Kalman滤波(KF)和Mean shift方法(Ms)在神经丝自动跟踪方面的应用与对比,分析两种算法在跟踪神经丝方面的优缺点。
1 卡尔曼滤波
Kalman滤波[2]相当于一个比较测量值和预测值状态观测器,通过计算增益K值,得到当前测量值和前次状态预测值之间估计的最优状态估计值。
首先,建立当前状态与上一状态概率分布的线性函数以及其观测模型:

其中,A、B、C代表状态、控制、测量矩阵,wt和vt分别是过程噪声和测量噪声。
其次,建立预测方程,引入状态转移矩阵A和协方差矩阵Q对状态和均方误差做预测:

更新滤波增益、状态估计和均方误差:

将上述公式迭代到最优结果,得到K的最优值。
2 Mean Shift算法
Mean shift算法[3]是以颜色、纹理等空间特征为核心参数,以概率密度估计为核心算法的目标跟踪方法。其基本形式为:

其中N(x)是坐标范围内的一组像素点,定义为:

计算出Mh(x),代替原有的x值,直到||mh(x)-x||<ε,得到最佳Mh(x)值。
3 实验与分析
本文使用美国俄亥俄州立大学Anthony Brown教授实验室录制的神经丝运动视频。采用KF算法和Ms算法对视频中运动的神经丝进行跟踪,选取视频第13、17、21、25、29、33、37、40、44帧作为研究对象,对比两种算法的跟踪效果,如图1和图2所示。

图1 Kalman滤波算法跟踪效果

图2 Mean Shift算法跟踪效果
从图1和图2中可以看出,Kalman滤波算法基本能够准确跟踪目标,而Mean shift算法在第30帧完全丢失目标,导致无法继续跟踪。
分别对两种算法的跟踪性能做运动分析和误差计算,如图3、图4和图5所示。
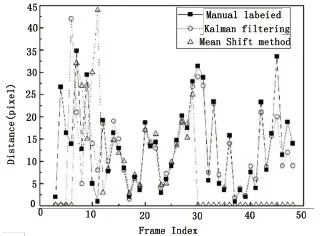
图3 人工标记法和Kalman滤波算法、Mean Shift算法所得到的连续帧像素距离对比

图4 基于Kalman滤波算法的跟踪误差

图5 基于Mean Shift滤波算法的跟踪误差
从图4中可以看出,Kalman滤波算法在开始时由于目标神经丝不完整,不能准确跟踪,造成较大误差;且在第45帧目标神经丝与非目标“重叠”时发生较大误差。从图5中可以看出,Mean shift算法不仅在开始时跟踪效果较差,还在第30帧完全丢失目标,致使30帧后误差巨大。
4 结论
Mean shift跟踪算法是基于颜色直方图的核函数的跟踪,当初始目标的颜色直方图区分度不强或目标运动速度存在波动而跳出核函数的带宽范围,都可能导致目标丢失。而卡尔曼的跟踪是基于运动模型和测量值的估计,避免了颜色模型和目标速度波动的影响,能够在迭代中不断收敛。本文针对神经丝的目标跟踪,分别采用Ms和KF两种方法,分析仿真结果可知,由于神经丝视频中目标小,在初始框中背景占比较大,Ms算法得到的相似度比较存在很大误差,KF算法比Ms算法更适合神经丝目标的跟踪,对后续神经丝的跟踪研究具有一定的参考价值。