基于激光扫描与卡尔曼滤波技术的地图构建系统及移动机器人
2018-08-11劳振鹏东莞理工学院机械工程学院黄市生黎梓恒曾志彬吴国洪东莞市横沥模具科技产业发展有限公司陈学忠广东石东实业集团公司
劳振鹏 东莞理工学院机械工程学院 黄市生 黎梓恒 曾志彬 吴国洪 东莞市横沥模具科技产业发展有限公司 陈学忠 广东石东实业(集团)公司
前言:现在的办公楼、居室很多使用了玻璃门窗做装饰,而现有的服务机器人大多使用红外传感器实现识别障碍物的效果,出现了服务机器人不能准确识别透明玻璃,需依靠压力传感器与透明玻璃的接触作用进而实现识别效果,导致该机器人的工作效率低;并且该机器人在构建室内地图时,容易出现不能准确地描绘玻璃墙、玻璃门的真实位置。此外,现有的移动机器人在地图构建方面,由于地形、光照等不确定性因素,通过传感器系统获得的外部信息往往数据误差大,并未能有效地处理数据,使机器人不能获取有效环境特征,导致了地图构建的不准确性、不全面性。还有,现有的应用在地图构建领域的移动机器人大多数为各种各样的轮式机器人,相比履带式机器人,轮式机器人对于凹凸不平或者沙粒为主的环境的适应性很低,行走不方便,执行任务的效率大大降低;并且轮式机器人需要使用的驱动电机比履带式机器人多,成本相对较高。
针对以上不足,本文提出了一种基于激光扫描与卡尔曼滤波技术的地图构建系统及移动机器人的设计方案,将从机构设计方面与软件系统搭建方面进行阐述。
1 硬件平台设计
本文所设计的机器人结构如图1所示,机器人采用三层平台的结构,由下往上,第一层平台为履带式运动结构,第二层平台为控制中心,第三层平台为传感器区;履带式运动结构包括履带、齿型轮、齿型轮固定件、电机固定件、12V带减速电机、90°角码、横梁;控制中心包括载板Ⅰ、树莓派三代主板、PWR电机驱动板、支杆;传感器区包括载板Ⅱ、超声波传感器、360°激光扫描测距雷达;
履带式运动结构中的齿型轮设置在齿型轮固定件的两端;履带与齿型轮配合;两个12V带减速电机斜对角分布,进一步的,通过电机固定件以螺纹连接的方式连接在齿型轮固定件;两根横梁均通过90°角码以螺纹连接的方式连接两边的齿型轮固定件;载板Ⅰ设置在横梁的上方,载板Ⅰ的通孔与横梁的通孔同轴配合;树莓派三代主板设置在载板Ⅰ的上方及中间位置;PWR电机驱动板设置在树莓派三代主板的上方;载板Ⅱ通过支杆与载板Ⅰ连接;载板Ⅱ的椭圆形状一端设置为朝向机器人的前方;超声波传感器共有五个,其中三个超声波传感器在载板Ⅱ的扇形区均匀分布,其一朝向机器人的正前方,另外在载板Ⅱ的左右方向分别设置两个超声波传感器,且位于该边线的中间位置;360°激光扫描测距雷达设置在载板Ⅱ的中心位置;
机器人由两个12V带减速电机驱动,12V带减速电机的正负极两根线与PWR电机驱动板的电机输出口电连接;PWR电机驱动板的ENA引脚(A通道使能端)与树莓派主板的16针电连接,ENB引脚(B通道使能端)与树莓派主板的18针电连接,通过使用树莓派GPIO输出5V电平信号控制使能端的输出电压实现电机加速与减速;PWR电机驱动板的IN1、IN2、IN3、IN4引脚分别与树莓派主板的11、12、13、15针电连接;
超声波传感器的Trig引脚与树莓派主板的GPIO2(3针)连接,Echo引脚先连接一个1k电阻再进一步连接树莓派主板的GPIO3(5针),在连接1k电阻与GPIO3之间的线路引出一个带2k电阻的电路接到GND,1k 和 2k 电阻组成了一个分压电路,使GPIO 3脚的电压降到了3.3v 左右;
2 软件系统搭建
运动方面,对树莓派编程,配置引脚的输入输出状态,设置16、18针输出PWM值进行机器人的速度控制,设置11与12针(13与15针)为互斥的电平状态实现电机的正反转,当两个电机的旋转方向与旋转速度均一致,机器人将直线行走,当两个电机的旋转方向相反、旋转速度相同,机器人将逆时针旋转或顺时针旋转,即为拐弯,设置11、12、13、15针均为False状态值,机器人停止运动。
避障方面,树莓派触发传感器发射超声波,并测量超声波从发射到返回的时间间隔,结合音速从而算出障碍物的距离,当检测到机器人两端的距离的差值稳定在一个范围里,机器人往前移动,当两端距离的差值超出这个范围,机器人往检测距离值大的一端自动调整。
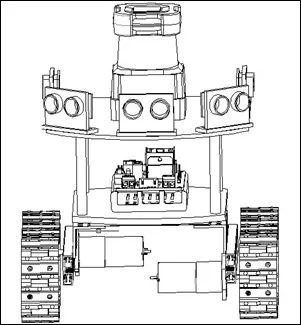
图1 硬件结构设计图
将360°激光扫描测距雷达与树莓派三代主板通过USB线进行电连接,树莓派连接激光扫描测距雷达,先设置ip 掩码和网关,然后通过程序指令采集激光雷达的检测数据;树莓派三代主板自带无线WIFI和蓝牙模块,在树莓派上建立串口通信,以蓝牙透传的方式将激光雷达的检测数据传送到PC机;利用上位机软件,将检测数据以ASCII格式储存,基于Matlab平台,编写数据解析的程序,使用分支结构读取各个数据的属性,进而读取数据;结合卡尔曼滤波算法,对数据进行处理,先对系统状态、误差协方差、过程噪声的协方差、测量噪声的协方差赋值,然后迭代计算卡尔曼增益、系统状态和误差协方差,对系统状态进行最优估计,得到最优的环境信息;并且采用栅格模型来构造地图,先初始化局部区域栅格模型,然后进行坐标转换,将障碍点坐标映射到栅格地图中相应的栅格上,实现把激光雷达的测量数据转换到栅格地图上,再依次读取所有激光雷达数据并给局部栅格地图赋值,实现将环境数据栅格化,得到栅格地图。
3 结束语
本文所做的工作总结如下:第一,根据功能的要求对移动机器人进行了结构设计;第二,根据机器人的功能要求搭建了软件系统。
