机器人驱动模块L298N
2018-08-11董邵万郭锐沈阳工学院信息与控制学院
董邵万 郭锐* 沈阳工学院信息与控制学院
1 机器人的发展
随着科技的发展,机器人行业的兴起,逐渐代替了一系列人工的工作,人类解放了自己,工业,例如工业生产,建筑亦或是危险的工作,逐渐的趋向于自动化,而机器人的研究,如机器人的结构,传感电路,驱动电路等,随着科技的进步其发展也变得越来越快了起来。
2 L298N驱动模块引脚
L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号;而且电路简单,使用比较方便。L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7V电压。4脚VS接电源电压,VS电压范围VIH为+2.5~46V。输出电流可达2A,可驱动电感性负载。1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。L298可驱动2个电动机,OUT1,OUT2和 OUT3,OUT4之间可分别接电动机,5,7,10,12脚接输入控制电平,控制电机的正反转。EnA,EnB接控制使能端,控制电机的停转。下图是L298N模块的结构示意图
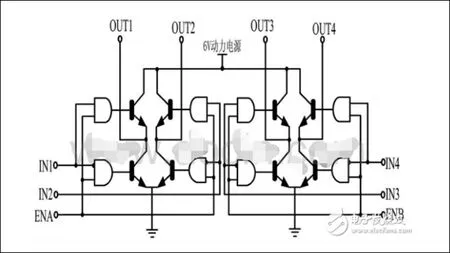
图1 1L298N结构示意图
3 L298N控制原理
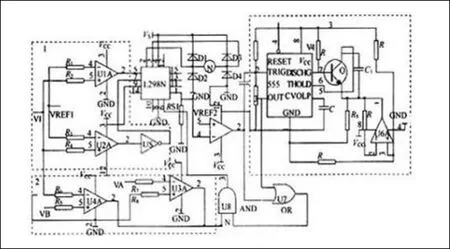
图2 L298N控制原理图
图2 是控制器原理图,由3个虚线框图组成。
(1)虚线框图1控制电机正反转,U1A,U2A是比较器,VI来自机器人体内传感器的电压。当VI>VRBF1时,U1A输出高电平,U2A输出高电平经反相器变为低电平,电机正转。同理VI<VRBF1时,电机反转。
(2)虚线框图2中,U3A,U4A两个比较器组成双限比较器,当VB<VI<VA时输出低电平,当VI>VA,VI<VB时输出高电平。
(3)虚线框图3是一个长延时电路。U5A是一个比较器,Rs1是采样电阻,VRBF2是电机过流电压。Rs1上电压大于VREF2,电机过流,U5A输出低电平。由上面可知,框图1控制电机正反转,根据直流电机稳态运行方程:U=CeФN+RaIa
其中:Ф为电机每极磁通量;Ce为电动势常数;N为电机转数;ia为电枢电流;Ra为电枢回路电阻。
电机转数N为0,电机的电流急剧增加,时间过长将会使电机烧坏。但电机起动时,电机中线圈中的电流也急剧变大,因此我们必须把这两种状态分开。长延时电路可把这两种状态区分出来。
长延时电路工作原理:当Rs1过流U5A产生一个负脉冲经过微分后,脉冲触发555的2脚,电路置位,3脚输出高电平,由于放电端7脚开路,C1,R5及U6A组成积分器开始积分,电容C1上的充电电压线性上升,延时运放积分常数为100R5C1。
当C1上充电电压,即6脚电压超过2/3VCC,555电路复位,输出低电平。电机启动时间一般小于0.8s,C1充电时间一般为0.8~1s。U5A输出电平与555的3脚输出电平经U7相或,如果U5A输出低电平大于C1充电时间,U7在C1充电后输出低电平由与门U8输入到L298N的6脚ENA端使电机停止。
如果U5A的输出电平小于C1充电时间,6脚不动作电机的正常启动。长延时电路吸收电机启动过流电压波形,从而使电机正常启动。
