基于移动互联的车联网监控调度系统设计与研究
2018-08-10王亚平蔺红良
王亚平,张 政,蔺红良
(1.陕西交通职业技术学院汽车工程学院,陕西西安710018;2.西安交通大学机械工程学院,陕西西安710049)
在我国社会经济不断发展的过程中,我国交通法规也不断完善,驾驶人员的安全意识也在不断提高,交通事故的发生机率在不断的提高,但是伤亡率并没有下降。现在每年国内由于交通事故导致的死亡人数及伤残人数大约为50多万。相关研究表示,驾驶人员的操作失误及局限性是导致交通事故的主要因素,如果能够使驾驶人员提前1s意识到有可能会发生交通事故,那么驾驶人员就有充分的时间对事故进行反应,以此避免汽车发生碰撞的机率。车联网属于智能交通系统中的主要内容,在其不断发展的过程中已经个逐渐成为智能交通系统中的主要组成部分。车联网能够在车辆行驶过程中作为信息感知对象,使人、车、道路、交通设备进行相互的信息共享及交换,以此实现四者之间的智能管控,有效改善道路交通拥堵情况,并且提高出行效率及安全性。基于此,本文就根据现代车辆行业的需求,针对线上业务,设计了以移动互联为基础的车联网监控调度系统,从而实现车联网无线数据通信的数据的收集及感知,实现现代交通的互联化及物联网,以此提供车辆管理调度的现代化管理水平,降低车辆事故的发生机率[1-2]。
1 基于移动互联的车联网监控调度系统架构
1.1 系统的总体架构
文中所涉及的基于移动互联的车联网监控调度系统主要是使用现代化的传感器技术及通信技术,实现与汽车相关信息的收集及处理,并且实现数据信息的共享,以此车、道路、人、城市网络的相互连接,创建满足智能化定位、识别、监控、跟踪及管理的现代化网络。通过功能将车联网监控调度系统结构分为3个层次,分别为感知层、网络层及应用层,详情见图1。通过图1可以看出来,感知层的主要目的就是通过RFID电子标签、传感器、阅读器及视频摄像头实现车辆的感知,在感知过程中获得大量与交通信息、车辆行驶情况及车辆信息相关的数据信息,在此过程中通过网络将收集的信息传送到互联网中,利用云平台实现大量异构数据信息的传输,并且对数据进行分析及处理,以此实现远距离通信及远程控制的目的。应用层的主要目的实现人机通信,比如车载计算机及终端等。基于云平台,通过卫星定位导航、电子地图、语音识别及4G网络构成的移动通信导航信息系统,也就是车载通信系统,其能够通过GPS定位系统及无线通信网对乘客及驾驶人员提供汽车、交通、工作及生活详细的状况及互联网服务[3]。
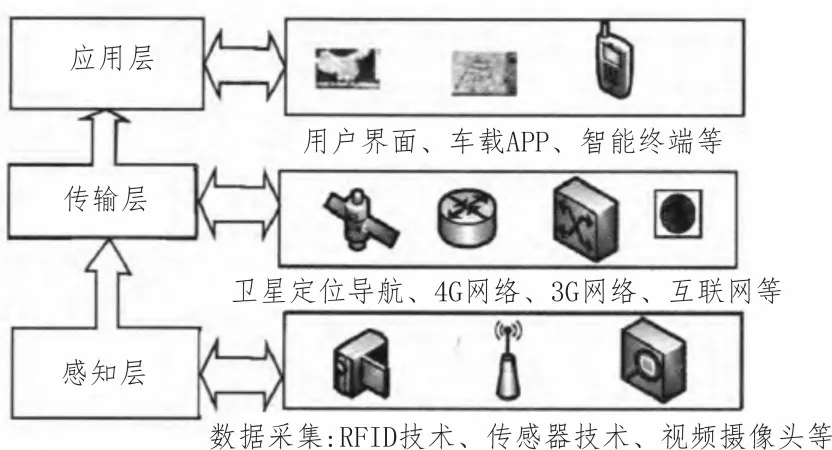
图1 基于移动互联的车联网监控调度系统总体架构
1.2 系统功能需求
车联网监控调度系统是以GPS车辆监控调度为基础,通过GPS技术及无线通信技术,利用车载终端实现车辆实时调度及安防报警,为驾驶人员提供准确的车辆信息服务,以此提高车辆的使用率及车辆在运行过程中的安全性。监控中心要求利用云平台进行集成,系统在高起点进行设计,以此能够实现系统可扩展性及可伸缩性,具有相应的计算机、通信及网络设备信息存储及处理能力,软件及硬件预留接口,便于系统的维护、升级及扩展,满足系统的信息化发展需求[4]。
2 系统的硬件设计
系统硬件平台就是车载终端设计,车载终端的主要目的就是实现GPS模块及GPRS模块数据的处理。对硬件设计及软件设计的难易程度进行全面的考虑,并且考虑先帝啊实施的需求,使用嵌入式处理器结构实现设计,利用现代化的嵌入式处理器S3C,其具有较快的运算速度,并且具有两个串口,能够实现GPS模块及GPRS模块的连接。图2为车载终端硬件的整体架构[5]。

图2 车载终端硬件的整体架构
车载终端属于系统重要模块,其主要目的就是实现车辆运行情况数据的收集,并且将收集到的数据传送到监控中心,实现监控中心返回调度命令的接收。简单来说,车载终端就是整个系统的行动及感知终端[6]。
2.1 GPS/GPSR集成模块
为了降低系统硬件设计的难度及PCB的面积,本文选择使用GPS/GPRS集成一体化的芯片SIM,此芯片供电电压为5 V,具有两个串口,能够支持电池充电管理,并且功能消耗较低,静态待机的电流只有1.0 mA,内部集成TCP/IP协议,此能够满足移动终端产品的使用需求[7]。
2.2 电源模块的设计
在车联网监控调度系统中,硬件模块具有重要的作用,其能够保证系统告诉的稳定运行,因为车载电源具有12 V及24 V电源,嵌入式处理器使用3种电源,并且汽车电器环境较为复杂,汽车在点火过程中及正常运动过程,都会影响输出电压,所以电源设计要使用款电源变换芯片,通过对比使用开关电源调节芯片LM作为系统的电源模块[8]。
3 系统的软件设计
基于移动互联的车联网监控调度系统主要包括两大部分的软件设计,分别为上位机软件及下位机软件,系统软件设计的整体框架如图3所示。
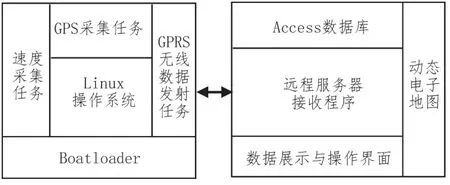
图3 系统软件设计的整体框架
下位机软件指的是车载终端嵌入式处理器中的软件,其是基于Linux操作系统的嵌入式软件系统,在整个系统的是最底层,主要目的就是实现硬件初始化,并且引导以上的操作系统。本文中的下位机软件就是实现操作系统的裁剪,并且在这个操作系统中编写应用软件,实现多种功能。
上位机软件指的是在远程监控中心运动的计算机软件,其主要目的就是实现系统接收数据软件及本地数据库管理系统数据进行检测。在开发上位机软件过程中,重点内容为数据接收及存储查询等,还包括数据库操作及地图匹配算法。以下就对本文设计系统中的个别软件进行分析设计,并且对软件进行实现[9]。
3.1 GPS模块设计
GPS监控模块的主要目的就是实现所有车辆的监控,将车辆在形式过程中的轨迹进行全面显示,并且实现车辆的实时跟踪。中心根据职能部门收到的调度命令,对移动终端发送文字调度命令。在移动终端接收到短信回复之后,根据一定的需求存档并且转发。中心接收到报警信息之后,通过监听形式实现核实,全面掌握实际情况,对正在执行任务的车辆实现重点跟踪监控,系统中心实现数据库历史资料的保存,对于需要包括的轨迹及地图进行打印,将车辆的状态全面显示,主要包括正常状态、报警状态。
为了能够保证GPS模块数据定位的准确性及可靠性,在进行软件设计过程中要对每帧的数据进行校对,具体操作使用异或者和的奇偶决定数据的可靠性。GPS数据的开始符号为∰,只要实现结束符号*的设计,在这两个符号中间的字符使用ASCII码进行异或运算,校对并且对比异或和帧数,就具有较高的可靠性,数据的解析是有效的,否则就无效[10]。图4为GPS模块的具体操作,以下为GPS模块设计部分代码:

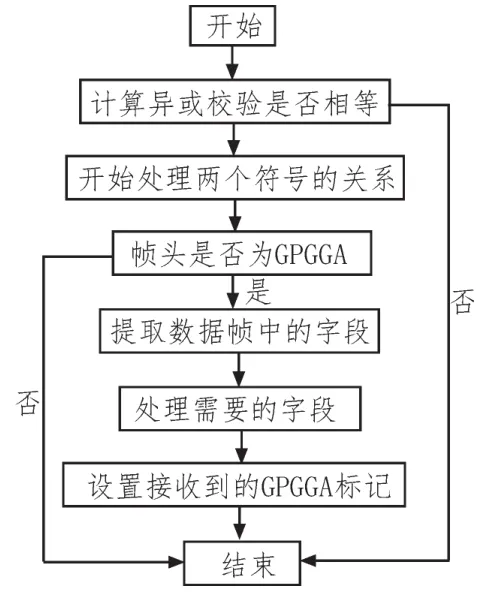
图4 GPS模块的具体操作
3.2 GPRS无线数据通信模块
智能监控调度系统使用嵌入式微处理器中的两个串口实现SIM的控制,其操作流程如图5所示。
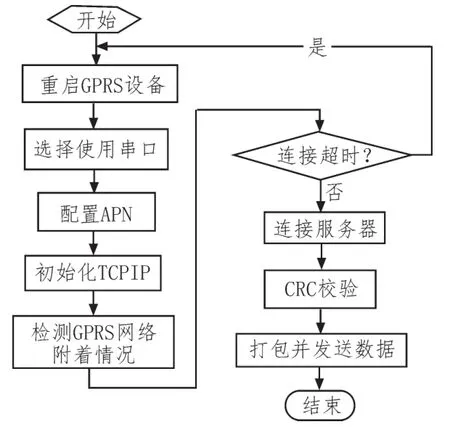
图5 SIM发送数据的流程图
文中设计使用动态数据定时发送,因为GPRS模块在长时间没有接到数据收发指令的时候会掉线,之后要重新创建连接才能够使用,所以为了实现数据的有效传输,软件就要使用指令检测其是否在线,从而能够提高数据传输的可靠性[11]。
3.3 操作系统
Linux操作系统为开源、可固化、可移植的实时操作系统,其结构较为简单,能够满足小型应用系统的设计需求。本文所设计的系统属于小型系统,所以使用Linux操作系统实现,其中所有应用程序都在操作系统中,根据不同的硬件平台实现系统的内核裁剪,以此匹配硬件系统及软件系统,实现程序在运行过程中的高速性及稳定性[12-13]。
4 系统实现
文中所设计的监控调度系统能够实现监控人员对车辆的控制及监视,其是系统设计的主要功能。监控工作人员为了得到车辆的定位信息,要创建呼叫策略,使车联网无线数据数据通讯回传定位数据,实现车辆追踪目的。并且还能够将数据包括历史记录,便于今后的查询。通过将指令发送到数据通讯中,实现车辆控制的目的[14-15]。系统的主要界面如图6所示。

图6 系统的应用主界面
5 结束语
文中以传感器网络技术及智能交通系统的发展为基础,通过GPS技术及物联网感知技术实现车联网监控调度系统的设计,实现车联网数据通信数据的收集及感知,以此实现系统对车辆的实时监控及安防报警,有效缓解交通拥堵,提高车辆使用的有效率,降低安全事故的发生机率。
