一款基于物联网+技术的智能护理床
2018-08-10蒋皆恢鲍珀赵德强严壮志
【作 者】蒋皆恢 ,鲍珀 ,赵德强,严壮志
1 上海大学先进通信与数据分析研究院,上海市,200444
2 上海大学生物医学研究所,上海市,200444
0 引言
随着社会的发展,目前中国人口比例正在逐步呈现老龄化的发展趋势[1-3],据中国第六次全国人口普查结果显示,截至2010年,中国65周岁及以上人口比例达到8.87%[4],已经步入老龄化国家行列。与此同时,随着物质生活的提高,老年人的慢性疾病的发病率也不断提升,据有关调查显示[5],中国65周岁以上老年人中60%~70%患有一种或多种慢性疾病[6],由此引发的老年人不能自理的现象越来越普遍。因此,近年来,智能护理床得到快速的发展。目前,电动护理床在国内外智能护理床领域使用非常普遍[1-2]。如日本八乐梦公司的电动护理床[7],能够升降床体的靠背和膝盖部分,并且调整床体高度。以这类电动护理床为代表的护理床产品往往价格昂贵,功能单一,缺乏准确控制、远程控制、智能监护等功能[8]。
与传统电动护理床不同,本文设计了一款新型的基于物联网+技术的智能护理床[7],医护人员不仅可以通过移动智能终端远程控制智能护理床完成精准的机械动作,还可以查询老人的体重信息,实现了护理与检测的智能化。
1 系统硬件设计方案
该智能护理床系统主要由护理床模块、中央控制模块、体重秤模块、电源模块和上位机模块组成。结构框图如图1所示。
系统的工作流程为:电源模块为整个系统提供工作电源;STM32处理器通过串口采集体重秤模块处理好的体重信息,然后通过蓝牙模块发送给平板电脑终端显示;平板电脑终端通过蓝牙模块发送指定格式的通信指令给STM32处理器,STM32处理器接收指令后控制相应的IO口高低电平状态驱动电机驱动电路,从而使得24 V直流电动推杆运动。上述流程实现床板的各种体态调整。下文对各个模块展开说明。
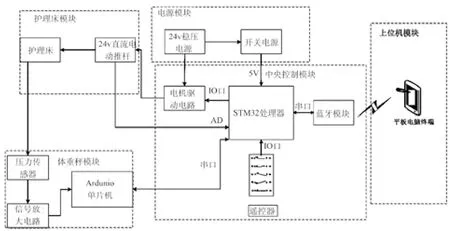
图1 智能护理床系统结构框图Fig.1 Structure diagram of intelligent care bed system
1.1 中央控制模块设计
中央控制模块是智能护理床系统的核心处理模块,用于接收并处理通信数据和驱动护理床各个24 V直流电动推杆的运动。中央控制模块实物图如图2所示。

图2 中央控制模块实物图Fig.2 Physical diagram of central control module
中央控制模块设计主要包括STM32F103处理器设计、蓝牙模块设计、电机驱动电路设计等。
1.1.1 STM32F103处理器
STM32F103处理器是中央控制模块的核心处理单元,STM32F103模块是高性能的内核为Cortex-M3的32位ARM微控制器[9]。该处理器具有64个针脚,其中,有10路AD接口和51个通用IO接口,满足智能护理床的多路AD采集和多路IO信号输出驱动电机驱动电路的要求。
1.1.2 蓝牙模块
蓝牙模块[10]实现了平板电脑终端与下位机模块STM32F103之间的数据通信,系统选用HC-06蓝牙串口模块,其供电电压为3.1~6.5 V,出厂默认串口波特率为9 600 Bound,8位数据位,1位校验位,通过AT指令一次性设置串口波特率、蓝牙名称、配对码等参数。
1.1.3 电机驱动电路设计[11]
电机驱动电路实现了将STM32F103控制器的输出电压信号放大到可以驱动24 V直流电动推杆的功能。电路设计如图3所示,整个电路分为两个部分,左侧为信号放大电路,实现控制信号的电压放大,右侧为MOS管H桥驱动电路,实现对电机的驱动。其中,IN1和IN2端是放大电路的输入端,该输入端和STM32F103控制器的IO接口连接;Q1、Q2、Q3、Q4是组成H桥驱动电路的MOS管;M1、M2端分别连接电机的电压正负端。
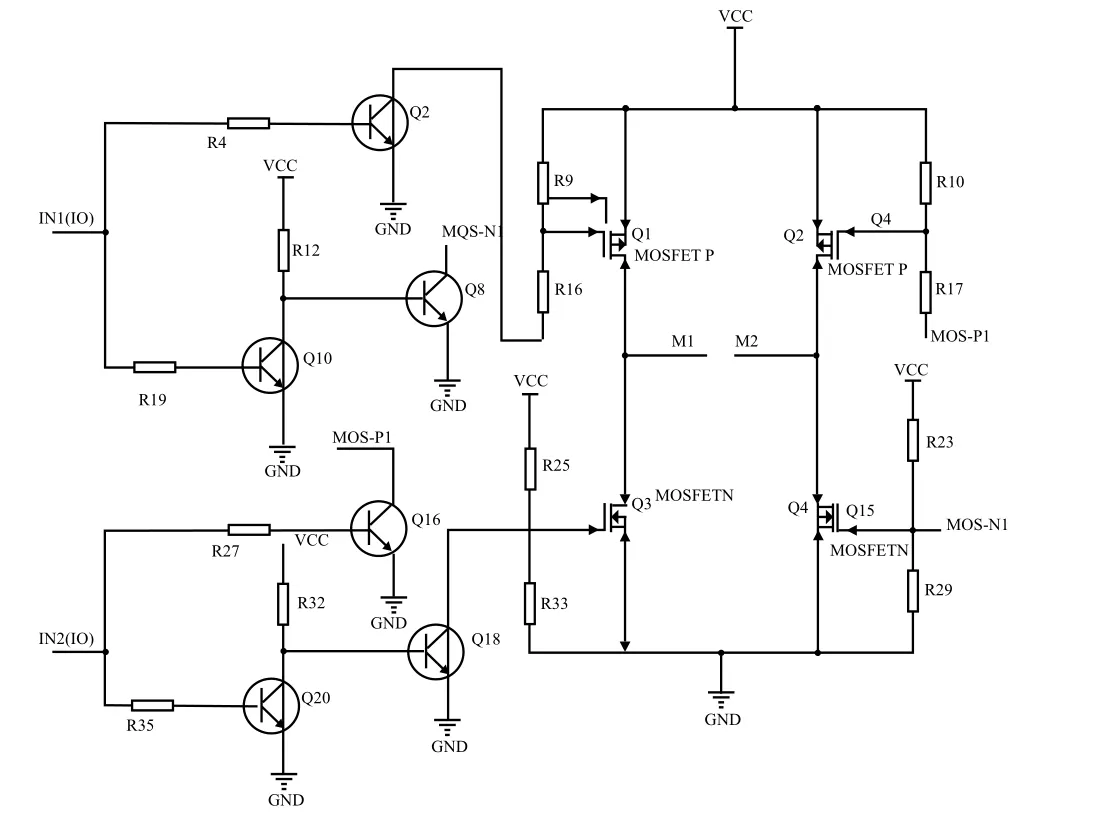
图3 电机驱动电路图Fig.3 Circuit diagram of motor drive
电机驱动电路工作过程如下:STM32F103处理器IO接口的输入电压信号经三极管放大后,控制MOS管Q1、Q2、Q3、Q4的通断,进而控制M1和M2接口的电平值,实现电机的三种工作状态,分别为电机停转、正转、反转状态。工作状态如表1所示。

表1 电机驱动电路输入输出状态表Tab.1 Motor drive circuit input and output status table
1.2 电源模块设计
电源模块用来为智能护理床系统各个模块供电。该模块包括开关电源电路[12]和24 V稳压电源。在系统电路设计中电机驱动电路采用了24 V供电,其余电路均采用了5 V供电,开关电源电路设计如图4所示。
开关电源电路采用开关电源集成芯片LM2596-5.0,LM2596-5.0为固定输出型开关电源芯片,最大输入电压为40 V,可带动 3 A负载,输出电压为5 V±4%,开关频率为150 Hz。在电路设计中,输入端两个并联电容C8、C9起到消除高频干扰,减小纹波的作用;输出端电感L1和电容C10、C11构成滤波回路;4号引脚为反馈电压引脚,通过与内部基准电压比较后控制调整管的通断;D1为续流二极管,当内部调整管关闭时,为L1提供放电回路。该电路能够实现+24 V电源到+5 V电源的转换。
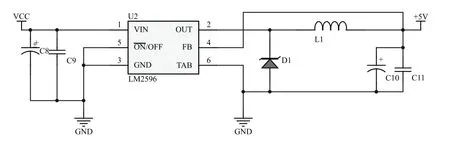
图4 开关电源电路图Fig.4 Circuit diagram of switching power supply
1.3 护理床模块设计
护理床模块是智能护理床的处理终端。整个床体的床板由背板、臀板、大腿板和小腿板4块板组成,背板和腿板可以在24 V直流电动推杆的支撑下移动。护理床示意图如图5所示。
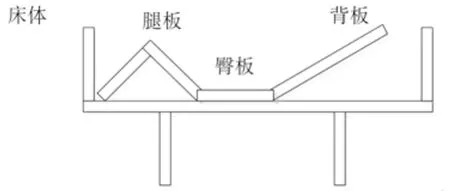
图5 护理床示意图Fig.5 diagram of nursing bed
1.4 体重秤模块设计
体重秤模块用于检测老人的离床在床状态。在体重秤模块的设计中,由于压力传感器输出信号仅为mV/V级别,所以需经过信号放大电路将输出信号放大到V/V级别,再由单片机采集。体重秤模块包括Arduino单片机、信号放大电路和压力传感器。其中,信号放大电路采用HX711模块[13]。体重秤模块连接图如图6所示。
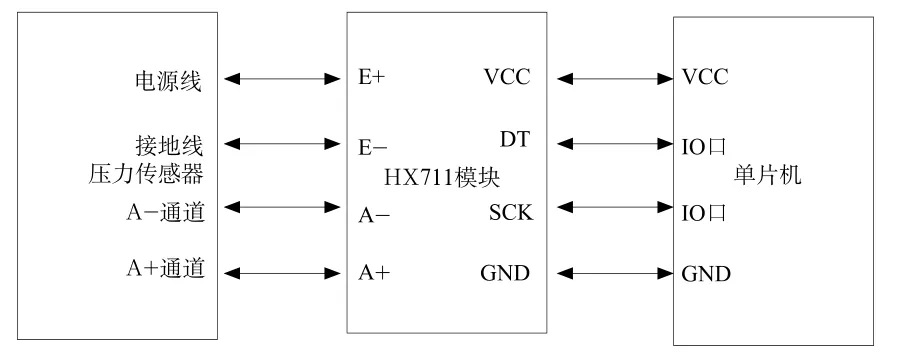
图6 体重秤模块连接图Fig.6 Connection diagram of weight scale module
HX711模块通过A-和A+引脚采集压力传感器的差分电信号,然后将采集到的差分电信号经过内部放大处理。单片机通过连接HX711模块DT数据引脚和SCK时钟引脚对处理好的体重数据进行采集,并通过串口传递给中央控制模块处理。
2 系统软件设计
2.1 上位机软件开发流程
上位机软件开发流程如图7所示。
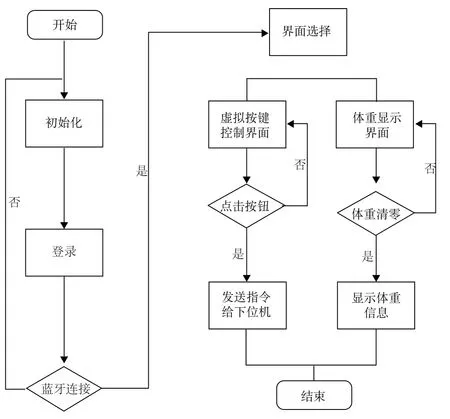
图7 系统上位机软件开发流程Fig.7 System upper computer software development process
上位机软件基于安卓系统进行开发[14],用户打开软件APP初始化后,进入登录界面,登陆成功后连接蓝牙,蓝牙连接成功后,进入界面的选择。在体重显示界面中,用户点击体重清零按钮实现去皮称重,然后时刻监控并显示床体的体重信息;在虚拟按键控制界面中,用户可以点击对应的功能按钮,软件APP通过蓝牙传输相应的数据通信协议给下位机处理。数据信息包的通信协议功能说明,如表2所示。

表2 数据通信协议说明Tab.2 Data communication protocol description
2.2 下位机软件开发流程
下位机软件开发流程如图8所示。
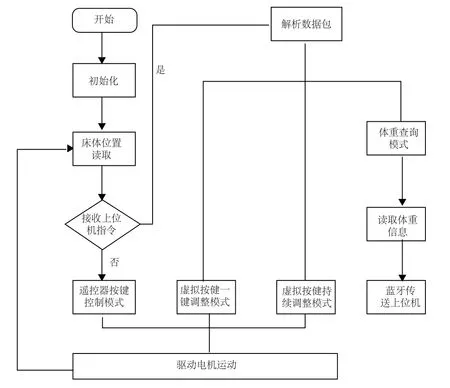
图8 系统下位机软件开发流程Fig.8 System computer software development process
下位机软件开发是基于STM32F103芯片的嵌入式开发,STM32F103在初始化后接收上位机控制系统发送的数据信息包,进行数据信息包解析并执行相应的控制模式。其中,虚拟按键一键调整模式、虚拟按键持续调整模式、遥控器按键控制模式是三种控制电机运转的模式,三种控制模式可以独立控制,互不干扰;体重查询模式可以查询老年人的体重信息。
3 样例实物展示
基于物联网+技术的智能护理床的一个样例如图9所示。

图9 三折智能护理床实物图Fig.9 System software development process
该样例选择三折结构的护理床,整个床体的床板由背板、臀板、大腿板和小腿板4块板组成,大腿板和小腿板联动,臀板固定,背板和腿板可以随意组合,三折护理床设计载重150 kg。
如图10所示: 该样例的体重秤模块选用的压力传感器型号为YZC-1B,量程为100 kg,灵敏度为2 mV/V,四个悬臂式传感器分别安装于四个床脚下方,总量程达到400 kg,去除床体自重150 kg,有效剩余量程为250 kg,完全能够满足设计要求。
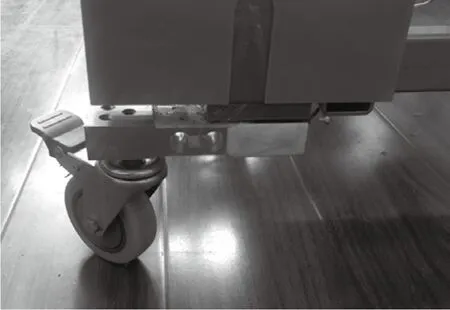
图10 体重秤压力传感器YZB-1B安装示意图Fig.10 Weight scale pressure sensor YZB-1B installation diagram
如图11所示:在虚拟按键控制界面中,用户点击上方的按钮完成一键调整模式,点击右边的五个按钮,可以持续的实现单独调整模式,在调整床体运动后,智能终端平板电脑上能够显示调整后的每个24 V直流电动推杆的位置。

图11 上位机操作界面Fig.11 Host computer interface
图11中表示的按钮驱动内容跟据人体工程学设计[15],能够实现7种床体体态,具体床体模式说明如表3所示。
4 控制准确度测试
系统采用闭环控制模式控制支撑床体的24 V直流电动推杆运动,闭环控制模式实现如下:
平板电脑终端通过蓝牙模块发送预定的直流电动推杆位置信息给STM32处理器,STM32处理器读取到预定的信息和当前AD读取的位置信息比较;设定一定的目标区间,目标区间分小于目标区间,大于目标区间和在目标区间内三种情况进行分类驱动电机;当直流电动推杆达到目标区间内时,即停止运动。
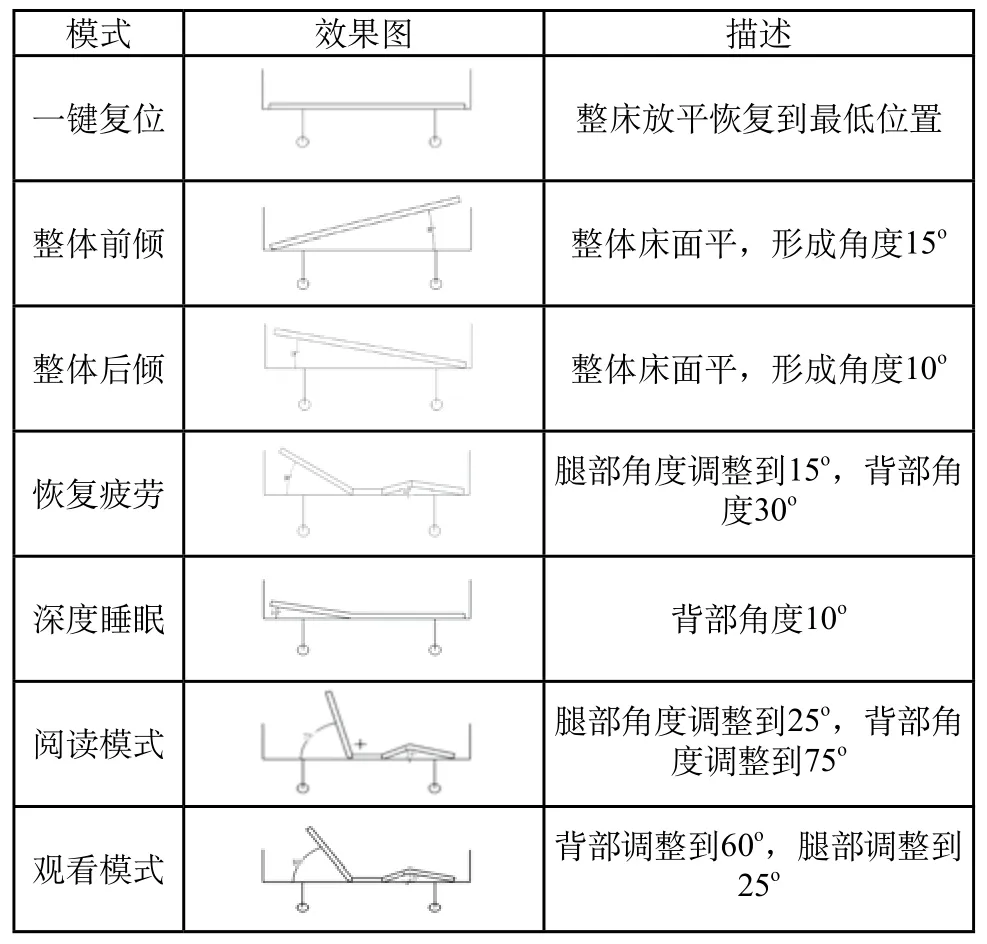
表3 床体模式说明Tab.3 Bed mode instructions
为了验证闭环控制[16]模式下床体运动的准确性,我们在平板电脑终端发送指令数据,然后用角尺去测量各个床板运动后的角度,最后和设定值进行对比。验证结果,如表4所示。

表4 闭环控制测试结果Tab.4 Closed-loop control test results
测试结果显示:上位机自动调整模式,能够控制各个床板同时运动,背板和腿板误差在2o以内,倾斜角度误差在1o以内,完全满足设计要求。
5 结束语
本文设计了一款基于物联网+技术的智能护理床,以STM32F103为处理器,内部功能模块丰富;以平板电脑终端作为用户操作界面,方便友好。在闭环控制模式的支撑下,医护人员可以准确、稳定地控制护理床的各种体态。智能护理床不仅降低了研发成本,而且方便了医护人员对病人的照顾。
