小型竖直螺旋式精量条施机的设计
2018-08-10李晓贤任震宇何培祥
李晓贤,赵 进,任震宇,陈 昶,汪 洋,何培祥
(西南大学 工程技术学院,重庆 400715)
0 引言
施肥可以提高农作物的产量和质量,精量合理施肥不仅有利于作物生长,而且可以提高肥料利用率,减少肥料浪费,并保护土壤环境,是农业可持续发展的方向[1]。在我国西南山地丘陵地区,大中型施肥机械难以使用,人工施肥存在劳动强度大、施肥量均匀性差等问题[2-4]。目前,使用的肥料绝大多数是颗粒复合肥,条施是其常用方式之一;但由于行走轮打滑或肥料架空、堵塞,易出现“断条”(即漏施)现象,使得该类机具的排肥均匀性较差,导致整体施肥质量较低。螺旋输送利用螺旋体与物料之间产生的相对运动输送物料,独特的螺旋结构在输送过程中可定量给料或定量卸料,用于排肥则具有稳定一致的单圈排肥量[5-7]。相较于水平螺旋输送,竖直螺旋在有效重力的作用下,物料输送的流动性和均匀性更好,有利于提高施肥机排肥的均匀性和对施肥量控制的精确性[8-11]。因此,本文设计了一种小型竖直螺旋式精量条施机,以满足西南山地丘陵地区机械施肥、精量施肥和均匀排肥的要求。
1 结构和工作原理
小型竖直螺旋式精量条施机的结构如图1所示。在控制器上设计有施肥量设置旋钮,设定施肥量后,相应的施肥量数据存储在控制器中;在排肥器的出肥口设置有排肥口开关,当检测到条施机工作时,打开排肥口开关,反之关闭排肥口开关,以防止在条施机转移或停止工作时肥料从排肥口流出等情况发生;在条施机行走轮上安装测速传感器,作业过程中传感器检测条施机的行走速度,根据传感器的的脉冲信号、施肥机的控制模型和单位长度进行施肥量设置,确定输入步进排肥电机的脉冲频率,从而控制小型竖直螺旋式精量条施机的实际排肥量。

图1 小型竖直螺旋式精量条施机结构图
2 竖直螺旋式排肥器分析
2.1 竖直螺旋排肥器数学模型
小型竖直螺旋式精量条施机的主要工作部件是竖直螺旋排肥器。工作时,螺旋回转,将肥料送入排肥管。水平螺旋式排肥器在排肥过程中对肥料有压实作用,会导致肥料的成块。竖直螺旋式排肥器在排肥过程中,利用肥料本身的重力外加螺旋叶片的推动,使肥料从底部排出,避免了水平螺旋式排肥器的架空和成块问题[12]。通过控制执行电机的转速实现排肥,排肥均匀性较好。竖直排肥器机构及控制模型如图2所示。
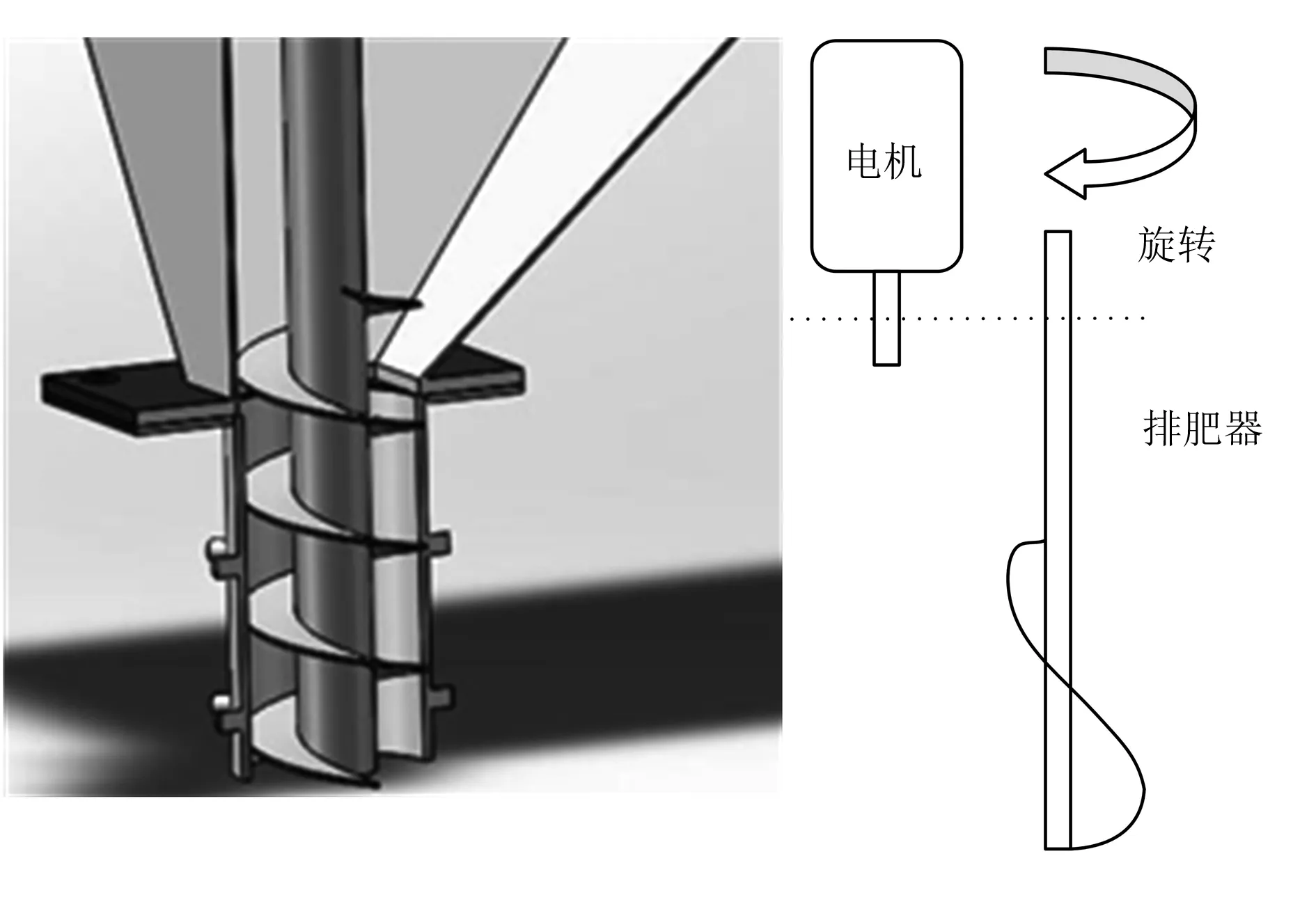
图2 竖直排肥器机构及控制模型
竖直螺旋式排肥器的排肥量计算公式为
(1)
式中q—单位时间的排肥量(g/min);
D—螺旋式排肥器外径(m);
d—螺旋式排肥器内径(m);
l—螺距(m);
n—转速(r/min);
φ—充满系数,φ=0.7~0.95;
p—肥料密度(kg/m3)。
因此,当螺旋式排肥器参数确定、肥料比重一定时,排肥量只与单位面积施肥量设置和螺旋式排肥器的转速n有关。
2.2 施肥机前进速度的影响
当施肥量设置一定时,精量条施机的施肥量与行走距离成正比,不会随条施机的行走速度变化。在行走轮上均匀安装霍尔传感器,两传感器之间的时间差直接反应出施肥机的前进速度。根据行走速度调节排肥器的转速,排肥量计算公式为
(2)
(3)
式中n—地轮转动圈数;
Q—施肥量(kg/hm2);
D—地轮直径(m);
δ—滑移率(%);
q—地轮转动n转的排肥量(g);
a—平均行距(m);
M—机具的行数;
L—施肥距离(m)。
由式(2)和式(3)可以推出
(4)
从式(4)可以看出:单位面积的施肥量一定时,排肥量与行走距离成正比关系。
2.3 螺旋排肥器的参数确定
对于给定的排肥量,有无数个螺旋排肥器截面积和转速组合满足排肥要求。但是,考虑到实际生产作业过程中螺旋排肥器的截面积是一定的,因此确定这两者之间的参数时,应在保证精度要求的前提下,还应该考虑到便于实际操作控制且使机器功率最小,实现最优控制[13]。
根据螺旋排肥器的物料运输性能分析可知:螺旋排肥器的截面积较大时,具有很好的一致性和稳定性。实际控制中发现:截面积越大,排出相等质量的肥料时消耗能量越多,且在单位长度上施肥量少时排肥精度降低。根据单位长度的施肥量与实际施肥的作业速度,在试验过程中得出:当螺旋排肥器直径D=45mm、d=18mm、螺距l=20mm时,螺旋排肥器在工作过程中可以满足设计要求的施肥范围。
3 控制系统电路设计
小型竖直螺旋式精量条施肥机的控制系统电路采用机电一体化的设计思路。施肥机单位长度的施肥量是操作者在施肥前根据田间土壤的肥力情况设置,设置的施肥量通过A/D转换存储到单片机的存储单元;在控制器中还设计了蜂鸣器与LED指示灯,蜂鸣器鸣叫速度与LED指示灯的组合代表不同的状态指示,以提示操作者。
由行走轮速度检测装置的霍尔传感器作为主要信号输入源,排肥步进电机和排肥口开关电机作为执行机构,单片机通过输出不同的脉冲频率控制驱动步进排肥电机,从而控制竖直螺旋排肥器的转速,达到施肥量与行走距离成正比关系的目的。
控制系统采用PIC18F23K22单片机[14],除了电源及复位模块外,其功能模块还包括施肥量设置模块、行走轮速度检测模块、排肥步进电机驱动控制模块、排肥口电机正反转模块和操作提示模块,电路原理如图3所示。

图3 小型施肥机控制电路框图
根据硬件电路结构框图,确定各个模块所需的特殊功能引脚。其中,程序烧写接口为固定引脚、施肥量设置电路需要模数转换功能引脚、排肥电机驱动电路需要PWM功能引脚、外部振荡器电路需要OSC1和 OSC2 引脚、施肥机行走测速电路使用的外部INT2中断引脚。确定了电路需要使用的特殊功能引脚后,再根据其他需要实现的功能分配相应的I/O端口引脚。具体硬件电路原理图如图4所示。
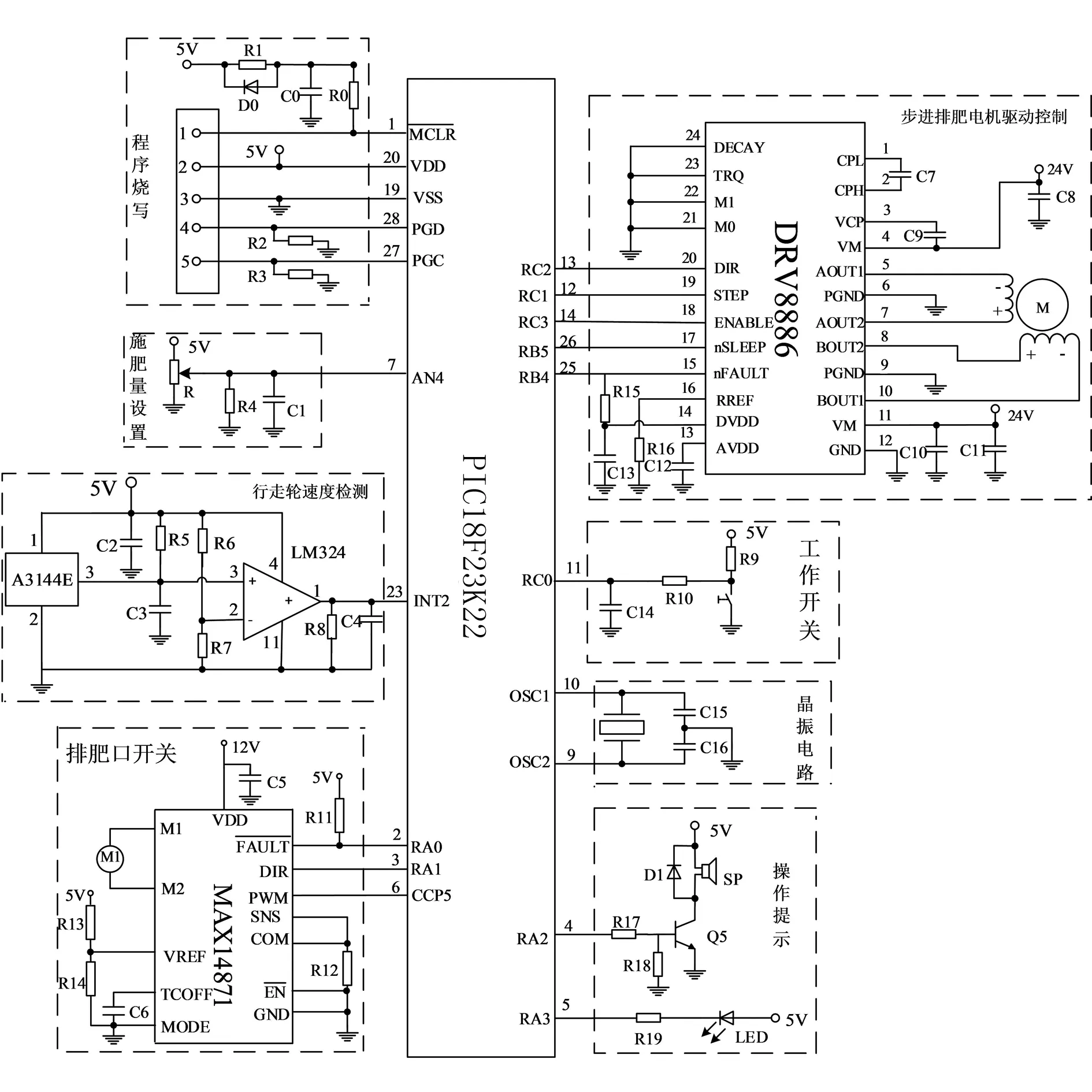
图4 硬件电路设计原理图
4 竖直螺旋式精量施肥机的试验
为了测试竖直螺旋式精量施肥机的实际性能,对其进行竖直螺旋式排肥器的性能试验、精量施肥机的均匀性试验和田间试验。
4.1 竖直螺旋式排肥机的性能试验
4.1.1 试验条件
根据精量施肥机的工作要求,选择行距为1.15m的地块进行试验,排肥量设置范围300~750kg/hm2,施肥机行走速度为0.5~1.2 m/s。试验开始时,排肥步进电机接入稳定12V直流电源,采用单片机内部时钟作为定时器并定时20s,采用方波脉冲发生器模拟行走轮测速传感器的脉冲,调节方波脉冲频率分别为13、12、11、10、9、8、7、6Hz;计时结束,自动关断步进电机电源,用数字电子秤称量各脉冲频率下竖直螺旋式排肥机的排肥量。
4.1.2 试验结果及分析
测量得到不同方波脉冲频率下对应竖直螺旋式排肥器的排肥量,试验数据如表1所示。

表1 排肥器性能试验数据表
通过对试验数据进行分析,得出单位长度的施肥量一定时方波脉冲(Hz)频率与排肥量(kg)的一次、二次拟合曲线,如图5所示。

图5 排肥量与PWM占空比的一次、二次拟合曲线
由图5可以看出:对方波频率与排肥量的关系进行曲线拟合, 通过比较一次、二次多项式模型,其相关系数R的大小几乎相等,保留4位小数均为0.995 1,超过了0.99,说明两者的拟合效果均较佳。由二次拟合多项式可以看出:二次项系数近似为零,可以从方程中去除,去除后为一次项模型。因一次项模型中已有最优拟合模型,故模型为
y=0.1681x-0.0669
R2=0.9951
(5)
式中x—方波频率(Hz);
y—排肥量(kg)。
4.2 试验
为了测试该条施机的工作性能,在重庆西南大学工程技术学院试验田里进行了田间试验。试验前,先根据当地标准作业行距计算出单位长度的施肥量,手动设置好每667m2施肥量,分别设置每667m2地施肥量为300、30、40、50kg。用电子秤称量适量的颗粒复合肥放入肥箱,然后人工推着该条施机样机在正常工作行走速度范围内行走施肥,用皮尺测量施肥距离,每隔10m测量1次施肥量。施肥量由作业前后肥箱里肥料的质量差测出,理论计算得出每10m对应的施肥量分别为345、517.5、690、863g。试验数据如表2所示。
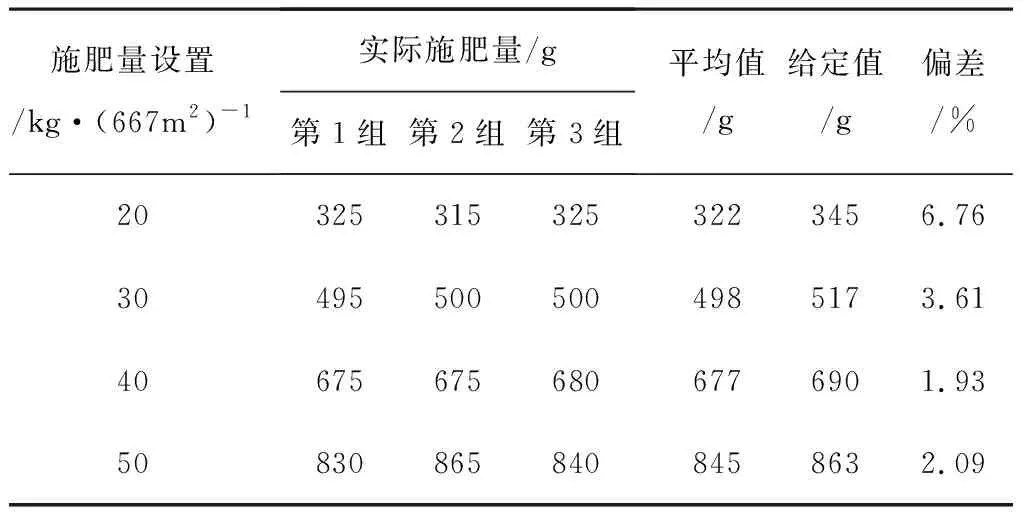
表2 田间试验数据表
根据施肥量与作业距离计算出单位长度的实际施肥量,用施肥量设置旋钮的值与单位长度的实际排肥量相比较,得出施肥机的田间作业精度[3]为
(6)
式中γ—施肥量偏差;
Wq—试验前料箱中肥料质量(kg);
Wh—试验后料箱中肥料质量(kg);
L—施肥作业长度(m);
F—给定施肥量(kg/m)。
定量施肥机的工作性能主要体现为排肥量的稳定性和一致性,分析评价指标主要为排肥量的变异系数。由试验数据表中的施肥量,可以计算出施肥量设置为最大、中间和最小时,单位长度内的平均施肥量、标准差D和变异系数σ为
(7)
(8)
(9)
式中xi—各次试验的排量(g);
x—各次试验的平均值(g);
S—各次排肥量一致性的标准差(g);
V—各次排肥量一致性的变异系数(%);
n—测量次数。
由试验数据可以得出:排肥量调节到750kg/hm2时,变异系数为V=1.80% ;排肥量调节到450kg/hm2时,变异系数为V=0.59%;排肥量调节到300kg/hm2时,变异系数为V=2.13%。由此可见,单位长度内施肥机具有较好的一致性,变异系数13%,满足施肥机施肥稳定性和一致性要求。
由表2可以看出:施肥量为300~750kg/hm2时,定量施肥机控制系统的最大偏差为6.76%,满足定量施肥机的设计要求,可以实现精确定量施肥。
5 结 论
1)通过建立竖直螺旋排肥器的数学模型,得到螺旋叶片主要参数为:内径18mm,外径45mm,螺距20mm。
2)设计了一种小型竖直螺旋式精量条施机,包括竖直螺旋排肥机构、行走轮速度检测装置和控制系统。控制系统根据霍尔传感器抗干扰电路处理后检测的行走轮速度,结合当前设置施肥量控制步进排肥电机转速,从而达到精量施肥的目的。
3)试验表明:设置施肥量一定时,小型竖直螺旋式精量条施机的排肥量与行走距离成线性关系;精量施肥机控制系统的最大偏差为6.76%,控制精度高;变速行走时,单位长度内施肥机具有较好的一致性,变异系数13%,排肥均匀性好。该施肥机为精量施肥机的设计提供了参考,提高了农业机械的机电一体化程度。
