基于高效低损目标的马铃薯收获机改进设计
2018-08-10孙传祝魏忠彩苏国粱李学强王法明王相友
孙传祝,魏忠彩,苏国粱,杨 平,李学强,王法明,王相友
(1.山东理工大学 a.机械工程学院;b.农业工程与食品科学学院,山东 淄博 255091;2.山东省马铃薯生产装备智能化工程技术研究中心,山东 德州 253600;3.中国农业大学 工学院,北京 100083;4.山东希成农业机械科技有限公司,山东 德州 253600;5.淄博市农业科学研究院,山东 淄博 255033)
0 引言
马铃薯粮菜兼用,营养丰富,产品附加值高,国内种植面积居世界首位[1-2]。但是,目前马铃薯收获装备无法满足产业化需求,其机械化收获水平远低于小麦、玉米和水稻等主要粮食作物。农业部启动“马铃薯主粮化”战略之后,对马铃薯收获装备提出了更高要求。
但是,现有设备的收获效率低、伤薯率和破皮率高,较差的薯土分离效果和较高的伤薯率是制约马铃薯收获机高效、可靠工作的技术瓶颈[3-4]。据统计,马铃薯总损伤量的70%来自于收获环节,收获过程中机具的前进速度和土壤的含水率均影响着马铃薯块茎的损伤。国内对马铃薯收获机械的技术要求是:明薯率≥95%,伤薯率≤5%,损失率≤5%[5-6]。
目前,国内主要采用分段式收获,杆条式分离筛是目前国内外马铃薯收获机具中广泛采用的结构形式[7]。收获作业后马铃薯被散置于地面,然后再进行人工捡拾,作业效率较低,劳动强度大[8-9]。马铃薯收获机从挖掘、薯土分离到薯秧分离各个环节输送距离较长,薯块翻滚次数较多,碰撞、摩擦甚至挤压导致伤薯率较高。杆条式分离装置一般通过设置抖动轮的方式来抖落泥土,加大振动幅度可提高分离效率,但伤薯率则随着振动幅度的加大而趋于严重。因此,薯土分离效果与抖动装置对马铃薯的损伤相互矛盾、难以兼顾[10]。另外,杆条式分离装置收获作业一段时间后,杆条上会附着一定厚度的泥土,有学者专门设计了橡胶圆辊式清土装置,泥土清理效果较好[11]。
在马铃薯收获与捡拾装备研究方面,一些学者做了相关研究[5,12-13]。目前,如何合理调控垄上压力,提高薯土分离效果,合理控制薯土挖掘量,进一步提高收净率和明薯率,最大限度地降低伤薯率和破皮率,是设计和改进马铃薯收获机械的关键所在[14]。本文针对现有马铃薯收获机存在的问题,从垄上压力调整、切土调整、挖掘调整和薯土分离调整等高效低损关键技术入手进行改进,以期保证良好的薯土分离效果,且损失率低、破皮率低、含杂少。
1 总体结构及工作原理
1.1 总体结构
马铃薯收获机主要由机架、垄上压力调整装置、切土调整装置、挖掘调整装置及薯土分离装置等组成,如图1所示。沿着马铃薯收获机的前进方向,机架从前到后设有前、中、后3条横梁。垄上压土调整装置安装于机架的前横梁与中横梁之间的下方,其圆柱形压土轮对应压在凸起的马铃薯薯垄上,两侧中横梁下方对称安装有切土调整装置;压土轮背向马铃薯收获机前进方向的后下方安装有挖掘铲,自挖掘铲铲面至收获机前进方向的最后端设有薯土分离装置。

1.垄上压力调整装置 2.传动装置 3.挖掘调整装置 4.地轮 5.薯土分离装置 6.机架 7.切土调整装置
1.2 工作原理
收获过程中,马铃薯收获机在拖拉机的牵引下向前运行。压土轮对应压在薯垄上,既限制挖掘深度,又达到松离薯土之目的。切土装置可将薯垄与地面切断,不仅便于上土、减小上土阻力,同时还可切断秧蔓,便于挖掘和薯秧分离。
随着收获机的前行,挖掘调整装置将对应位于薯垄两侧的一对切土盘切开后的薯垄整个挖取起来,并输送到薯土分离装置的分离筛上面。薯、土、秧的混合物随着杆条式分离筛的工作段由前向后运动,土壤穿过分离筛的杆条间隙不断落下,秧蔓则被抽秧装置分离出去,分离干净的马铃薯摆放在地面上。
2 关键零部件改进设计
2.1 垄上压力调整装置
垄上压力自动调整装置主要由U形架、摆动架、摆臂、压土轮、悬挂架和液压缸等组成,如图2所示。两个U形架分别相对于两组切土调整装置对称固定在前横梁下方,摆动架前端两侧各向下伸出一凸耳,并分别铰接在U形架两侧面前端;两个摆臂的一端分别固定在摆架两侧的下边缘处,向后伸出的另一端装在压土轮轴的两端。槽形悬挂架一端固定在中横梁前侧,且设有铅垂方向的长槽;两个液压缸的缸体分别铰接在悬挂架的长槽内,液压缸的缸杆末端铰接在摆动架上。
当遇到薯垄凹凸不平、土壤疏松程度不一时,通过液压缸缸杆的伸缩带动摆动架和摆臂上下摆动,使得压土轮处于浮动状态下工作,以自动调整收获机对薯垄的压力,既达到薯土松离的效果,又可避免压溃薯垄而导致伤薯;通过调整液压缸缸体在长槽内的不同位置来控制压土轮施加于薯垄上的作用力,解决了因收获机自身质量过大易压溃薯垄而造成伤薯的问题;改变销轴的不同位置,也可辅助调整压土轮施加于薯垄上的作用力。另外,对于收获期降雨量大、含水率较高的地块,垄上压力调整装置可有效避免薯垄过度“下陷”。因此,该设计提高了马铃薯收获机对不同地块、不同马铃薯品种的适应能力。
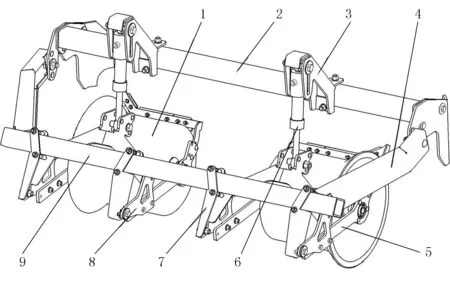
1.压土轮 2.中横梁 3.悬挂架 4.连接臂 5.摆臂 6.液压缸 7.U形架 8.摆动架 9.前横梁
2.2 切土驱动装置及调整原理
2.2.1 切土驱动装置
切土装置由立柱、切土盘、摆动杆、调整杆和切土驱动装置等组成。其中,切土驱动装置包括驱动盘和抓地爪,如图3所示。
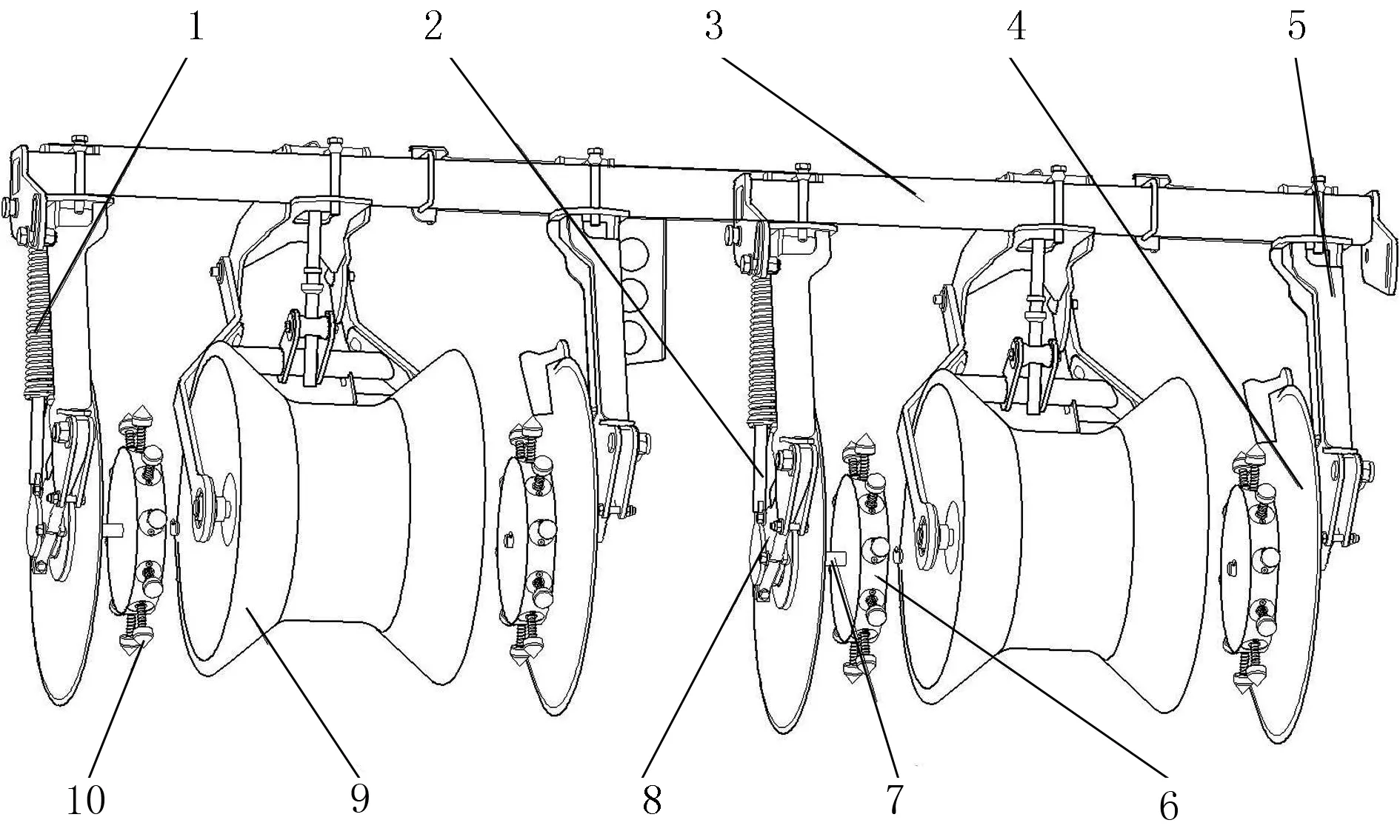
1.弹簧 2.调整杆 3.中横梁 4.切土盘 5.立柱 6.抓地爪 7.垄上压力调整装置 8.摆动杆 9.销轴 10.驱动盘
安装于中横梁下方的立柱朝着前进方向倾斜的下端设有扇形槽,扇形开口的最低点处设有限位钉;摆动杆的一端安装在扇形槽的孔内,另一端与安装有切土盘的销轴中部铰接;调整杆的下端与销轴铰接,外圆套有弹簧后,向上的伸出端穿过立柱上端的连接板后装有螺母。同一组切土装置的两片切土盘之间靠近切土盘处对称装有两组切土驱动装置,其驱动盘外圆柱面上沿径向均匀设有多个沉孔,且各沉孔内装有抓地爪。
2.2.2 切土调整原理
更换地块或收获不同品种的马铃薯时,改变图2中液压缸的供油压力大小即可改变压土轮相对于横梁(即相对于马铃薯收获机机架)的高低位置,从而改变了切土盘相对于横梁的高低位置,最终改变了切土盘的切土深度。
拧动调整杆上端的螺母,也可改变切土盘相对于马铃薯收获机机架的高低位置,即达到单独调整切土深度之目的。但由于拧动螺母的同时,还改变了弹簧的压缩程度,因此单独调整切土深度的幅度相对较小。收获过程中,若切土盘遇到石块等坚硬杂物时,切土盘将通过调整杆压缩弹簧向上抬起,以避免损坏切土盘。
由于切土盘同轴安装有切土驱动装置,且其抓地爪端部呈圆锥形,增大了与地面之间的附着力,收获过程中可驱动切土盘始终处于正常转动状态,彻底解决了现有马铃薯收获机作业过程中切土盘的时断时续转动问题,确保秧蔓和杂草切割顺畅,提高了切土效率和马铃薯收获机的工作可靠性。
2.3 挖掘调整装置
挖掘调整装置由机架Ⅰ、机架Ⅱ、挖掘装置和深度自动调整装置等组成,如图4所示。
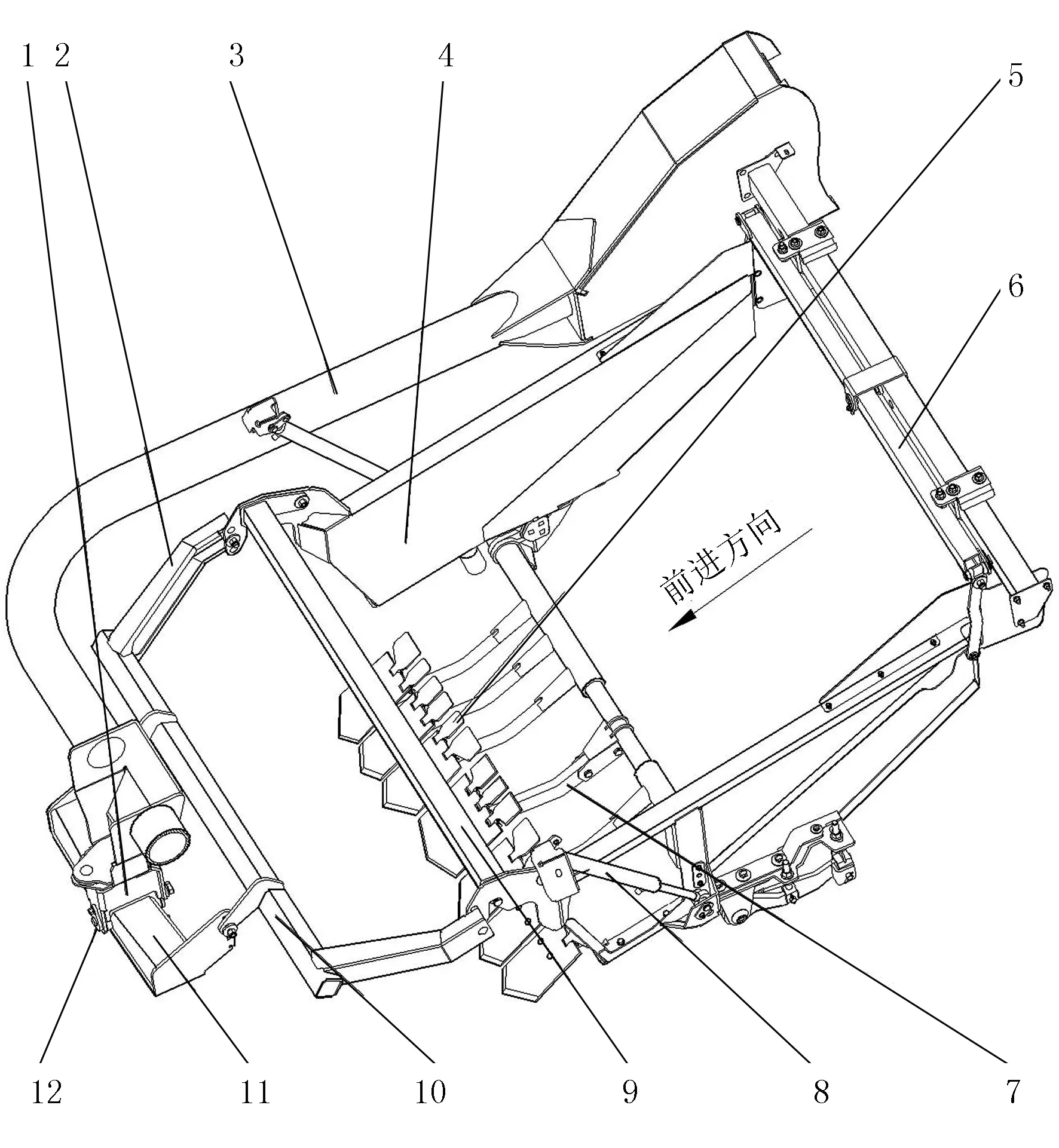
1.吊架 2.连接臂 3.机架Ⅱ 4.立板 5.侧挖掘铲 6.后横梁 7.中挖掘铲 8.液压缸 9.中横梁 10.前横梁 11.连接桥 12.销轴
其中,机架Ⅰ包括横梁、连接臂和立板等;挖掘装置包括侧挖掘装置和中挖掘装置;深度自动调整装置包括液压缸、吊架、连接桥和销轴等。连接桥的两U形侧边分别与固定在前横梁两端的连接件铰连,一端固定在牵引架下方的吊架铰接在连接桥U形底边中点处,机架Ⅰ的后横梁与机架Ⅱ的后横梁Ⅳ的中点处铰接。两个液压缸一端分别铰接在机架Ⅰ上,另一端分别铰接在机架Ⅱ上。侧挖掘装置对应于薯垄,以完成正常挖掘作业;中挖掘装置对应于两薯垄之间的“垄沟”位置,以便将与该收获机配套使用的侧输出收获机收获、摆放于“垄沟”的薯块收集、输运至薯土分离装置。机架Ⅰ通过铰接在连接桥U形底边的回转轴和穿过后横梁的回转轴铰接在机架Ⅱ上。
在收获地表具有一定侧向倾斜角度的地块时,两侧由拖拉机的液压系统供给液压油的液压缸可自动调整机架Ⅰ与机架Ⅱ的相对位置,即始终保持与地表的倾斜程度一致,保证安装在横梁Ⅰ上的压土调整装置、切土调整装置及挖掘装置也实现同步实时调整,且两侧的挖掘深度始终一致,从而可有效解决因地表倾斜而导致的伤薯以及整机自平衡等问题。
2.4 薯土分离装置
2.4.1 振动强度可调式薯土分离装置
振动强度可调式薯土分离装置由机架、分离筛和振动调节装置组成。其中,振动调节装置包括液压马达、偏心轮、连杆、摇臂、摆动轴、摆动架和胶轮,如图5所示。
1.摇臂 2.摆动轴 3.连杆 4.偏心轮 5.液压马达 6.支座 7.机架 8.分离筛 9.摆动架 10.胶轮
支座固定在机架一侧的立板上,液压马达安装在支座靠近机架的一侧,其输出轴穿过支座后的伸出端装有偏心轮;摆动轴两端安装在机架两侧的立板上,摇臂的一端固定在摆动轴穿过机架立板后的伸出端上,另一端与连杆的一端铰接,连接的另一端套装在偏心轮上;3个V形摆动架的V形顶点均匀固定在摆动轴上,V形末端各装有胶轮。
当遇到不同土壤类型、不同马铃薯品种对分离筛的振动强度需求有所差异时,通过调整液压马达的供油压力即可调整振动调节装置的振动频率;通过改变销轴在摇臂的不同孔的铰接位置,即可实现振幅的调节。因此,解决了传统马铃薯收获机薯土分离装置的振幅、频率调节受限的问题,进一步提高了马铃薯收获机对不同地块、不同马铃薯品种的适应能力。
2.4.2 波浪式薯土分离装置
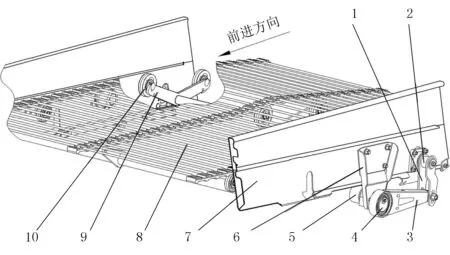
波浪式薯土分离装置由机架、分离筛、主动辊、从动轴、支承胶轮、压筛轮和自动调整机构等组成。其中,自动调整机构包括液压缸、液压锁、连杆和摆动杆,如图6所示。
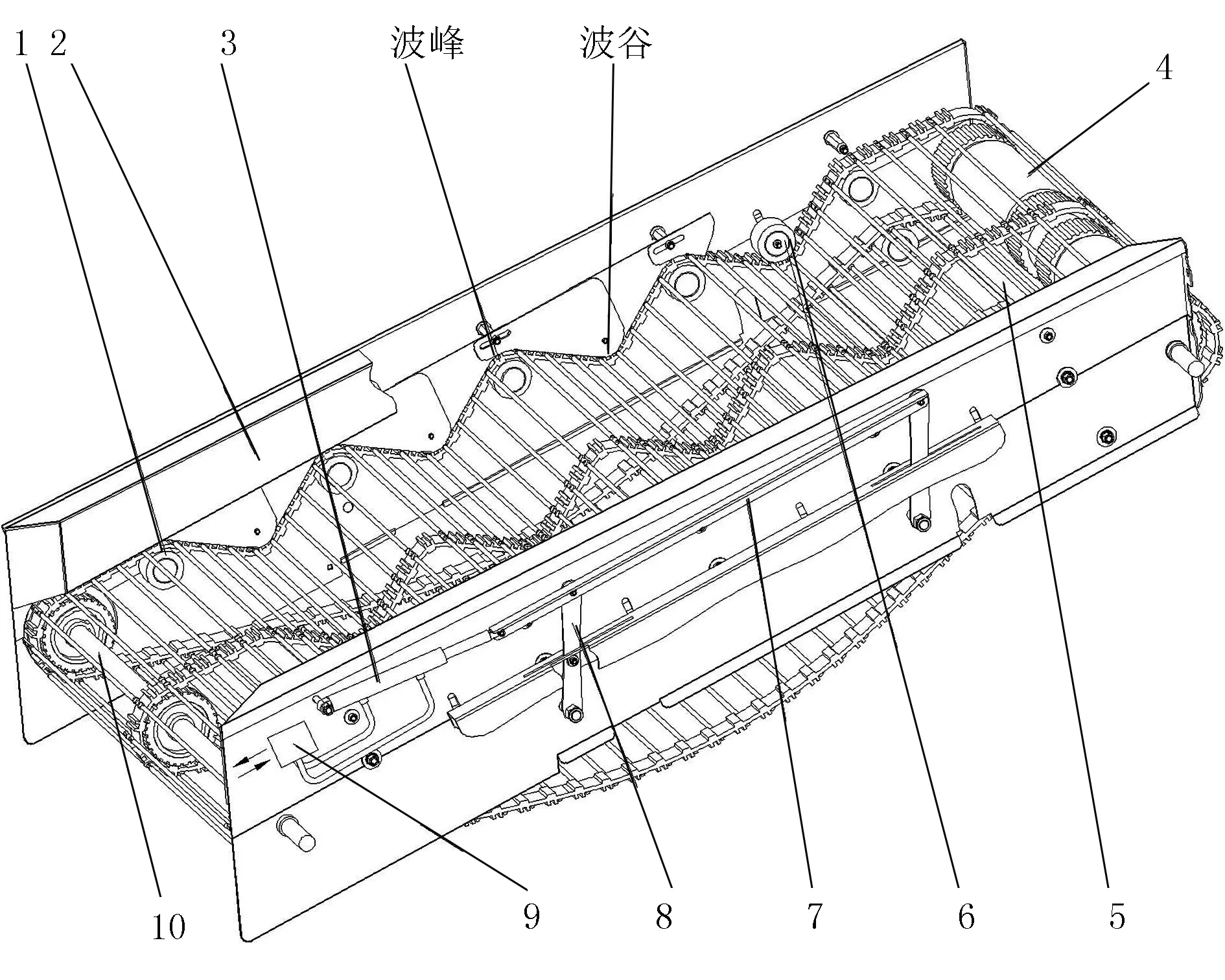
1.支承胶轮 2.机架 3.液压缸 4.主动辊 5.分离筛 6.压筛轮 7.连杆 8.摆动杆 9.液压锁 10.从动轴
从动轴和主动辊两端均支承在机架两侧壁上,并分别位于收获机前进方向的前端和后端,机架两内侧壁位于主动辊和从动轴之间分别均匀装有多个支承胶轮。4个摆动杆一端分别对称铰接在机架两外侧壁上,另一端分别铰接在两个连杆两端,连杆的另一端分别与液压缸的缸杆端部铰接,液压缸缸体分别铰接在机架两外侧壁上,液压缸与液压锁连通;升降架的U形底面朝上对称套装在铰接于机架两侧的摆动杆上部,且升降架的U形内侧底面均与安装在摆动杆中部的滚轮贴合,压筛轮分别安装在升降架的U形侧壁上。连接成环状的分离筛挂在主动辊和从动轴上,位于主动辊和从动轴之间的上段分离筛分别承托在支承胶轮上方,且被压在压筛轮下方。
由于将薯土分离装置设计成波浪形,挖掘后粘性较强的土壤时,马铃薯及土块、秧蔓混合物经过波峰与波谷之间的“翻滚”过程而实现碎土,同时有助于秧蔓在上下、前后运动过程中下落,提高了土壤、秧蔓的筛分效率;由于液压缸和液压锁配合使用,使得波浪幅度大小可调,既能收获粘性土壤,又可收获中性土壤地块的马铃薯。因此,可有效解决目前马铃薯收获过程中筛分效率不高、破皮率较高的难题,进一步提高了马铃薯收获机对不同土壤地块、不同马铃薯品种的适应能力。
3 结论
1)当遇到薯垄凹凸不平、土壤疏松程度不一时,由于液压缸缸杆的伸缩带动摆动架和摆臂上下摆动,使得压土轮处于浮动状态工作,既松离薯土,又可避免压溃薯垄而导致伤薯。
2)增设的切土驱动装置可有效保证收获过程中切土盘始终处于正常转动状态,彻底解决了现有马铃薯收获机作业过程中切土盘的时断时续转动问题,确保秧蔓和杂草切割顺畅,提高了切土效率和马铃薯收获机的工作可靠性。
3)当收获地表具有一定侧向倾斜角度的地块时,两侧液压缸可以自动调整机架Ⅰ与机架Ⅱ的相对位置,保证压土调整装置、切土调整装置及挖掘装置实现同步实时调整,从而始终保证两侧的挖掘深度的一致性,有效解决了因地表倾斜而导致的伤薯、整机自平衡及能耗较高等问题。
4)当收获不同土壤类型、不同马铃薯品种时,可自动调整振动调节装置的振动频率和振动幅度。挖掘后粘性较强的土壤时,由于采用可调节的波浪形薯土分离装置,马铃薯及土块、秧蔓混合物经过波峰与波谷之间的“翻滚”过程而实现碎土,提高了土壤、秧蔓的筛分效率。因此,本设计可有效解决目前马铃薯收获过程中筛分效率不高、破皮率较高的难题,进一步提高了马铃薯收获机对不同土壤地块、不同马铃薯品种的适应能力。
