基于计算机视觉的无人机农田信息获取系统研究
2018-08-10舒晓斌
王 琴 ,舒晓斌 ,刘 勇
(1.漯河食品职业学院,河南 漯河 462000;2.河南科技大学,河南 洛阳 471000)
0 引言
无人机是无人驾驶航空飞行器的简称,诞生于1914年,发展至今已经成为了一个庞大的家族。无人机根据飞行平台的不同主要分为固定翼无人机和旋翼无人机,它们实质上都是一个由飞行器平台、遥控站、通讯模块及其它部件组成的系统[1]。固定翼无人机是无人机最早的类型,最初是为军事领域服务,用于侦查联络和作为靶机。后来,以美国为代表的发达国家意识到固定翼无人机的巨大军事价值,开始大力投入并研发出了侦察打击一体的多种无人机型号,引领了无人机的发展趋势[2]。
与固定翼无人机相比,旋翼无人机可以垂直起降,没有滑跑距离,因此对场地的要求低,能够在各种地理环境和复杂条件下作业。同时,旋翼无人机还可以空中悬停,有利于获取更加清晰、准确的地面信息。在设计难度、制造成本及负载能力上,旋翼无人机也体现出明显的优势[3]。旋翼无人机近些年在我国的发展迅猛,形成了以“大疆”系列为代表的多种产品,并且在国民经济和生产的各个领域得到了应用。与固定翼无人机一样,军事也是旋翼无人机的应用领域之一;但是受限于飞行的高度和速度,其主要的功能是对情报的收集。
旋翼无人机在工业方面主要应用于测绘、电力和通信这3大领域。测绘领域的无人机飞行平台上整合各种数字传感器和摄像机,可以获得高清图像,再辅以快速、准确的信号传输能力,使测绘的实时性和准确性明显改善。电力领域通过无人机巡视线路,不仅具有较高的效率,还能够降低人为失误率、危险性和成本,保证电力系统正常运行[2]。
旋翼无人机在农业方面主要用于农药喷洒、农田信息监测和农业保险勘察这3个领域。目前,无人机在农业上最广泛用途是喷洒农药,其飞行速度慢、高度低,因此作业过程中定位准确、喷洒均匀,并且药液的下降距离短,飘散导致的浪费和污染很少。另外,无人机喷药显著地降低了人力成本,在未来农业植保领域的市场预计超过千亿[4]。无人机在农田信息监测中的用途包括作物长势、缺水情况和病虫害检测,大多是通过现代遥感技术获得的。无人机所获得的农田信息覆盖范围大、实效性强且客观准确,较传统检测方法具有无可比拟的优势[5-9]。无人机在农业保险勘察中用于对大范围的受灾田块界定面积和评估损失,机动性和定位精度高,能够快速、高效地完成勘察工作[10]。此外,未来的无人机还可以用于播种、施肥和授粉等作业,推动农业生产方式的变革。
无人机的很多用途都是基于对其所拍摄图像的处理分析来实现的,因此图像分析模块是无人机系统的重要组成部分,甚至成为其性能发挥的关键。计算机视觉是一种新兴的图像分析技术,其利用计算机代替人类视觉,从拍摄的图像中提取目标信息进行分析和识别,最后得到有应用价值的结果。目前,计算机视觉在无人机上的应用是辅助无人机自主着陆、自动导航和飞行姿态监控[11-15]。在农业领域,计算机视觉可以分析无人机拍摄的农田作物图像,获取作物的种类和长势、病虫草害发生程度及水分供应信息,或者在农业保险勘测中分析估算作物受灾面积。李宗南等利用无人机遥感拍摄了玉米田块图像,然后通过计算机视觉分析色彩和纹理特征,建立了玉米倒伏面积提取方法。
在大力发展精准农业的趋势下,作为基础技术的农田信息获取显得尤为重要。农田信息获取的方式包括卫星遥感、大型飞机航拍、车载或手持摄像和无人机拍摄。其中,无人机拍摄适合我国单位种植面积小、农作物品种多样的国情,若将计算机视觉与无人机结合,则有助于推动农田信息获取方式的进步。本文基于计算机视觉,建立了一种获取农田信息的无人机系统。无人机装载的数码相机拍摄农田图像,通过无线通讯装置发送给信息检测中心,由图像采集卡转换为数字信号;计算机视觉模块接收原始图像依次进行预处理、灰度化和特征提取,最后根据颜色特征对农田中的作物种类、生长势态和面积进行识别,从而获取农田信息。利用该系统对种植不同作物的农田进行试验,验证系统信息获取的准确性和实时性,以便为拓宽无人机在农业中的应用范围提供技术支持。
1 系统的设计及组成
1.1 总体设计
农田信息获取系统由无人机平台、无线传输模块、地面站和计算机视觉模块4部分组成。系统的工作流程为地面站根据农田面积和形状等特征规划航线,通过无线传输装置发送给无人机。机载相机拍摄农田图像,回传给地面站进行存储并转换为数字信号由计算机视觉模块分析识别。核心计算机平滑图像噪音增加可识别性,然后对输入的图像进行分析,提取农田信息并进行保存,如图1所示。

图1 农田信息获取系统的工作流程
1.2 组成部分
无人机平台为大疆精灵Phantom 4 Advanced型四旋翼型无人机,满载质量5kg,续航时间30min。其能够采用GPS/GLONASS双模式定位,安装前视视觉装置,无线传输速度可以达到Class10,最远传输距离7km。数码相机为尼康COOLPIX P60型,安装在无人机的下方,光轴与竖直方向夹角为40°,宽度和高度上的像素分别为3 264点和2 448点,拍摄生成JPEG格式的图像。
无线传输模块采用Wifi无线通讯方式,其通讯带宽大,数据实时传输能力强。模块可以通过PID控制方法将设定的飞行路径发送给无人机,并利用红外无线传输控制其飞行速度和方向,同时实时接收相机拍摄的画面并传送给图像采集卡。图像采集卡为天创UB570型,将相机拍摄的JPEG格式图像转换为数字信号以供核心计算机分析。
地面站安装大疆DJIGS Pro专业版软件,用于设计无人机的飞行航路,控制飞行速度、高度、姿态和相机拍摄时机。核心计算机为联想扬天M4700型台式计算机,硬件配置Intel i6中央处理器和10GB的DDR4内存,运行快速,性能稳定。安装Windows10操作系统和MatLab工具箱,可以满足图像实时处理和信息存储的要求。
2 图像处理
2.1 图像的采集和预处理
以水稻田为例,无人机保持4m/s速度和10m高度沿田埂飞行,启动相机拍摄图像。相机与稻田之间处于相对运动的状态,再加上拍摄瞬间可能出现的抖动,导致稻田图像中含有噪音,对成像质量和后续分析造成了影响。这里对图像通过5×5的中值滤波进行平滑处理,去除噪音,得到稻田的原始图像,如图2所示。由于相机在高处俯视拍摄,其光轴与竖直方向存在一定的夹角,使得各个距离上的物体在图像上存在不同程度的畸变,会影响后续作物面积计算结果的准确性。文本参考纪寿文等的方法,对图像的畸变进行矫正[16]。
2.2 图像的灰度化
根据水稻田图像受光照强度影响较大的实际特点,选用HSI模型的颜色空间分析图像,分别对色调H、饱和度S和亮度I分量进行处理,得到在HSI颜色空间下对I分量灰度化的图像,如图3所示。

图2 水稻田的原始图像

图3 水稻田的灰度化图像
2.3 农田信息获取
水稻田图像由水稻、杂草和工作行组成。其中,杂草为浅绿色,两行水稻之间预留的工作行为黑色。水稻按照长势分为两种,扬花期水稻为黄绿色,分蘖期水稻为深绿色。大部分水稻杂草也是禾本科植物,叶片形状与水稻相似,计算机视觉的区分难度较大。因此,利用各组成部分的颜色差异将它们分离出来。
图像分割的计算简单,运行速度快,是利用颜色特征对图像各组成部分进行识别的有效方法。在色调H、饱和度S和亮度I这3个分量中,水稻和杂草的颜色特征受亮度I影响最小。因此,将I分量效果图和灰度图分别做最大类间方差分析后再进行二值化,通过分析直方图获得最大阈值T1、T2和T3,经过阈值分割得到杂草、扬花期水稻、分蘖期水稻和工作行的图像区域,如图4所示。统计各图像区域范围内的像素点数,通过标定像素当量与拍摄距离之间的关系,便可以计算得到各图像区域的实际面积。
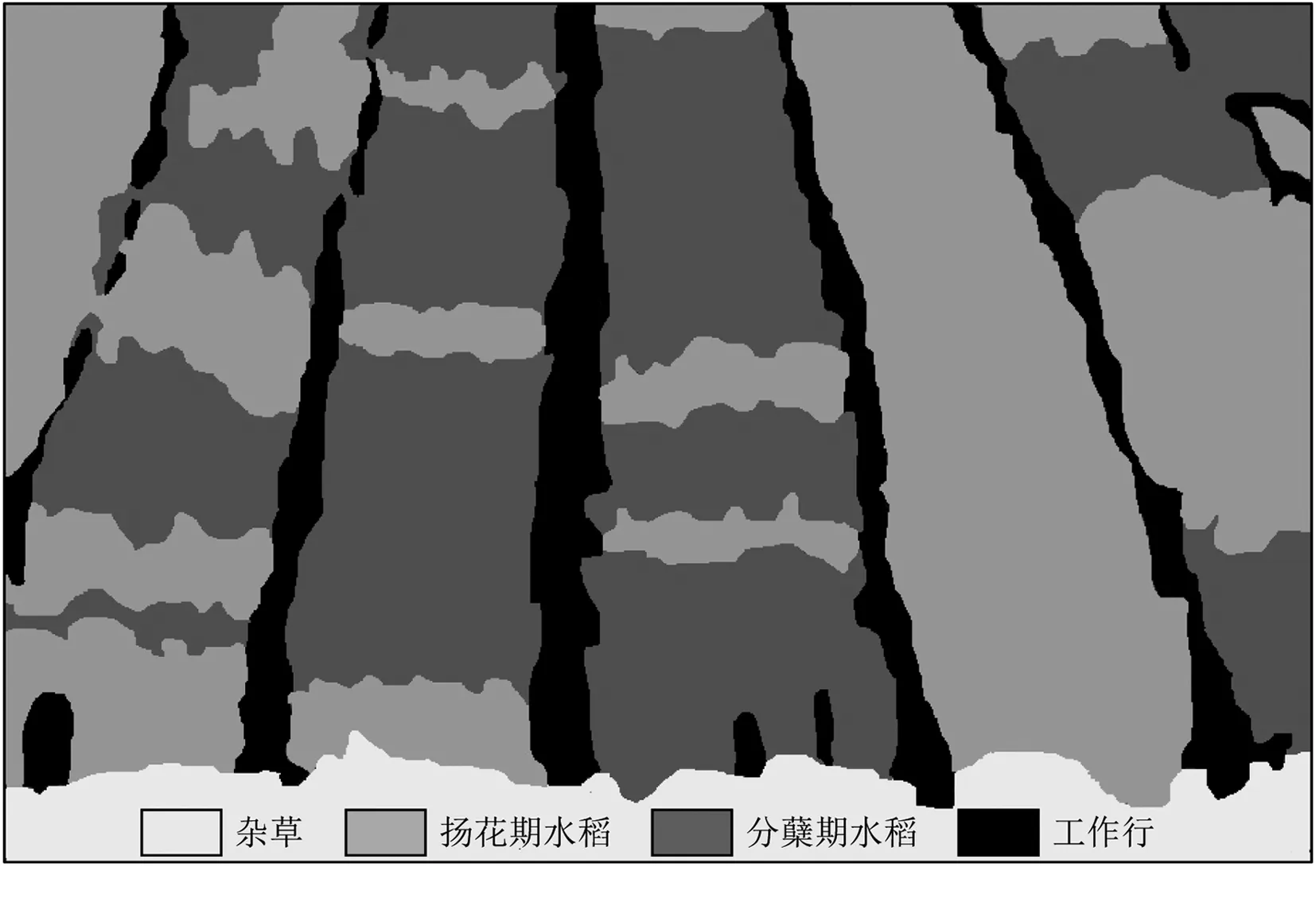
图4 水稻田的图像分割
3 试验结果和分析
在本单位的试验基地内分别选择水稻、小麦、玉米和大豆的代表性田块,用无人机拍摄图像,然后进行计算机视觉分析。4种作物的图像分别在当季拍摄,设置相同的无人机飞行速度、高度和拍摄角度以保证外部条件尽量一致。图像分析后获取作物、杂草和工作行的区域面积,与人工测量的实际值比较,计算相对误差,用以评价系统获取信息的准确性。相对误差计算公式为
式中δ——相对误差,一般用百分数表示;
△——绝对误差;
L——实际测量值。
系统对4种作物农田信息获取结果的准确性如表1所示。在水稻田和大豆田中获取的目标作物面积较为准确,杂草和工作行面积的相对误差较大,都超过10%。小麦田的各项相对误差较小,都没有超过10%,表现出很高的准确性。玉米田的各项相对误差都较大,其中工作行达到23.68%,准确性最低。综合分析发现:作物植株太高会形成遮挡,降低农田信息获取的准确性。田间杂草的叶片形态和颜色与目标作物接近时,识别的难度也会增加。系统从拍摄图像到输出结果的整个过程耗时2s,可以实现农田信息的实时获取和处理。

表1 系统获取的各区域面积相对误差
4 结论
基于计算机视觉技术,建立了一种用于获取农田信息的无人机系统。无人机拍摄农田图像,发送给信息检测中心,转换为数字信号后由计算机视觉模块处理,根据颜色特征识别农田作物种类和生长势态,并计算各区域面积。试验结果表明:系统对水稻、小麦和大豆田的信息获取较为准确,玉米田由于作物植株太高形成遮挡,降低了农田信息获取的准确性。系统从拍摄图像到输出结果的整个过程耗时2s,具有较强的实时性,可以为拓宽无人机在农业中的应用范围提供技术支持。
