农业机器人灵巧手遥操作虚拟现实实验平台
——基于LabVIEW
2018-08-10赵阶晨
赵阶晨
(黄山职业技术学院,安徽 黄山 245000)
0 引言
随着科学水平的不断发展及人类社会活动的拓展升级,深入研究机器人并让其更好地服务于人类已成为发展趋势。人类绝大多数的工作都是依靠双手完成的,目前为止,机械臂技术基本成熟,倘若灵巧手的研究能够跟上,那么机器人代替人类指日可待。本文根据农业机器人工作特性,结合机器人的结构,采用虚拟现实技术,并结合LabVIEW软件开发了上位机,对灵巧手遥操作进行研究,并对灵巧手抓取过程进行实时控制与监测。
1 虚拟现实技术
虚拟现实技术(VR)是计算机控制领域最前沿的新型技术,主要是利用计算机仿真模拟出一种虚拟的场景,用户在场景内可以通过触觉、听觉、视觉感知场景的变化情况,从而使自己沉浸于虚拟世界中,并与其进行一系列的交互。VR技术现已广泛应用于软件模拟仿真、影视动漫设计、房地产样品房设计和3D游戏等领域。
1.1 虚拟现实技术概念与应用领域
1)虚拟现实技术概念。虚拟现实技术是一门综合性学科,包含了计算机图形学、模拟仿真、动漫设计、智能控制、多传感器融合和图像处理等多学科技术。多学科和高新技术的集成与融合给虚拟现实技术带来了高逼真的场景体验,通过模拟人的视、听、触、运动等行为的人机接口技术及特定设备,使客户能够进去虚拟世界,获得身临其境的体验,客户通过人机交互装置便可以去探索宏观与微观世界中事物运动变化的差别。
虚拟现实技术的首要元素是在计算机平台上面建立3D场景,使用者通过听觉、视觉和触觉去感知3D场景,并能够通过特殊的交互设备去操作其中的物体器件,能够以自己的意志感觉随意行走控制场景;其次,虚拟现实技术采用一种先进的用户接口技术。目前,人机接口主要包括键盘、 鼠标、优盘等面向机器的接口,而虚拟现实采用的接口却是面向用户。
2)虚拟现实技术的应用领域。虚拟现实技术最先出现时,主要是应用于军事上的模拟训练。初期主要是训练宇航员、飞行员,3D模拟场景可以模拟出在外太空和飞机上的真实场景,各种设备仪器可以真实地进行操作和工作。宇航员和飞行员可以在虚拟场景中模拟出极端的飞行条件,然后尝试着去解决问题。由此可以提高宇航员和飞行员的实战经历,且不会有什么危险,更不会损坏航天器和飞机而造成经济损失。另外,各国军事部门正在研制一些模拟战场(如陆战、空战、海战等训练场景),在节省训练成本和提高训练效率的同时大大降低了人员的伤亡率。
虚拟现实技术作为新兴产业,其发展才刚刚起步,随着技术的逐渐进步和成熟,未来将应用于更多的场合。
1.2 虚拟现实技术系统组成
虚拟现实技术系统可以根据实际的应用需求进行开发,其主要由以下4部分组成:①3D虚拟场景,是一个由计算机软件模拟出来的可交互场景,用户可以全方位地进行观看或加入。②计算机平台,为系统提供观察和人机交互的功能。③I/O人机接口,为用户和虚拟场景提供交互的工具;④用户,即整个3D虚拟场景的操纵者。
虚拟现实技术系统框架如图1所示。图1中,I/O 人机接口为用户和计算机之间的交互提供了接口,3D虚拟场景由计算机根据软件和数据库建立。
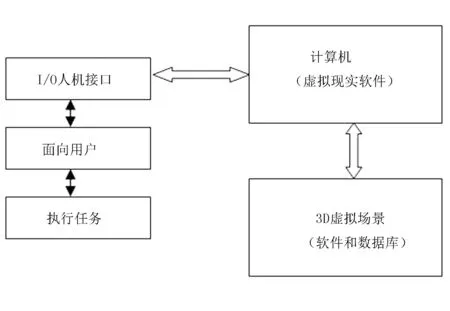
图1 虚拟现实技术系统框架
2 农业机器人灵巧手遥操作软硬件设计
2.1 农业机器人灵巧手遥操作硬件架构设计
灵巧手遥操作虚拟现实实验平台采用分层搭建的思想,在硬件框架设计上分为人机接口和灵巧手控制系统两部分。硬件架构如图2所示。
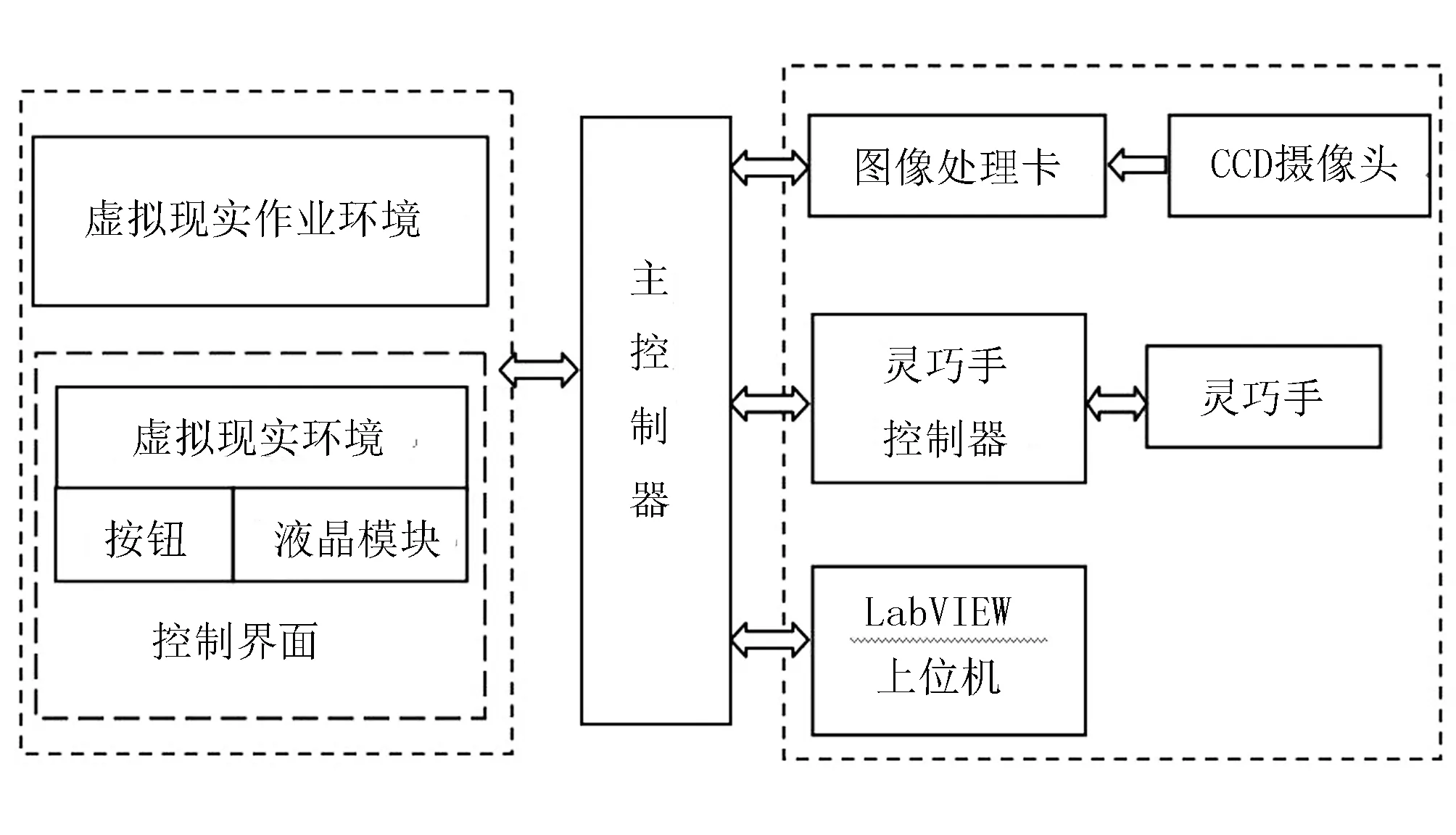
图2 硬件设计架构图
人机接口系统主要包括虚拟现实作业环境、液晶显示模块和控制器按钮组成的控制界面。虚拟现实作业环境可以根据要求模拟仿真出农业机器人灵巧手作业区域的实时场景;控制界面的虚拟现实环境可以实时将灵巧手作业画面现实在终端设备上,供操作人员参考,使其能够准确、及时地操作灵巧书进行作业。控制界面主要提供给操作人员,操作人员根据界面获取作业现场和灵巧手的实时数据信息,并采取一定措施进行操控。
灵巧手控制系统包括图像处理模块、灵巧手控制器及LabVIEW上位机等。图像处理模块主要是对CCD摄像机获取的图像信息进行实时处理,然后回传给主控制器;灵巧手控制器主要是根据人机接口系统发送过控制信息对灵巧手进行实时控制;LabVIEW上位机则是实时对灵巧手的运动信息进行搜集分析,然后将信息反馈给主控制器,再将信息发送给人机接口系统。
在实际的应用中,灵巧手安装在农业机器人末端控制器上,人机接口系统和灵巧手控制系统的工作原理如图3所示。
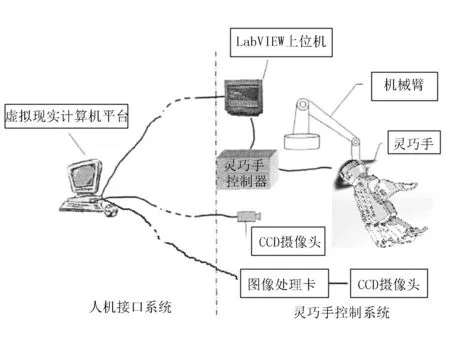
图3 人机接口与灵巧手的工作原理图
2.2 农业机器人灵巧手遥操作软件架构设计
系统软件架构设计采用模块化编程思想,主要包括系统主程序、驱动控制子程序、图像处理子程序、虚拟仿真子程序、信息分析子程序、通讯子程序和LabVIEW上位机。软件设计架构如图4所示。

图4 软件设计架构图
主程序开始工作时,首先对各子程序进行一系列的初始化,然后根据预先设定的流程或者根据操作人员输出的信息执行对应子程序,实现指定的功能。主程序流程如图5所示。
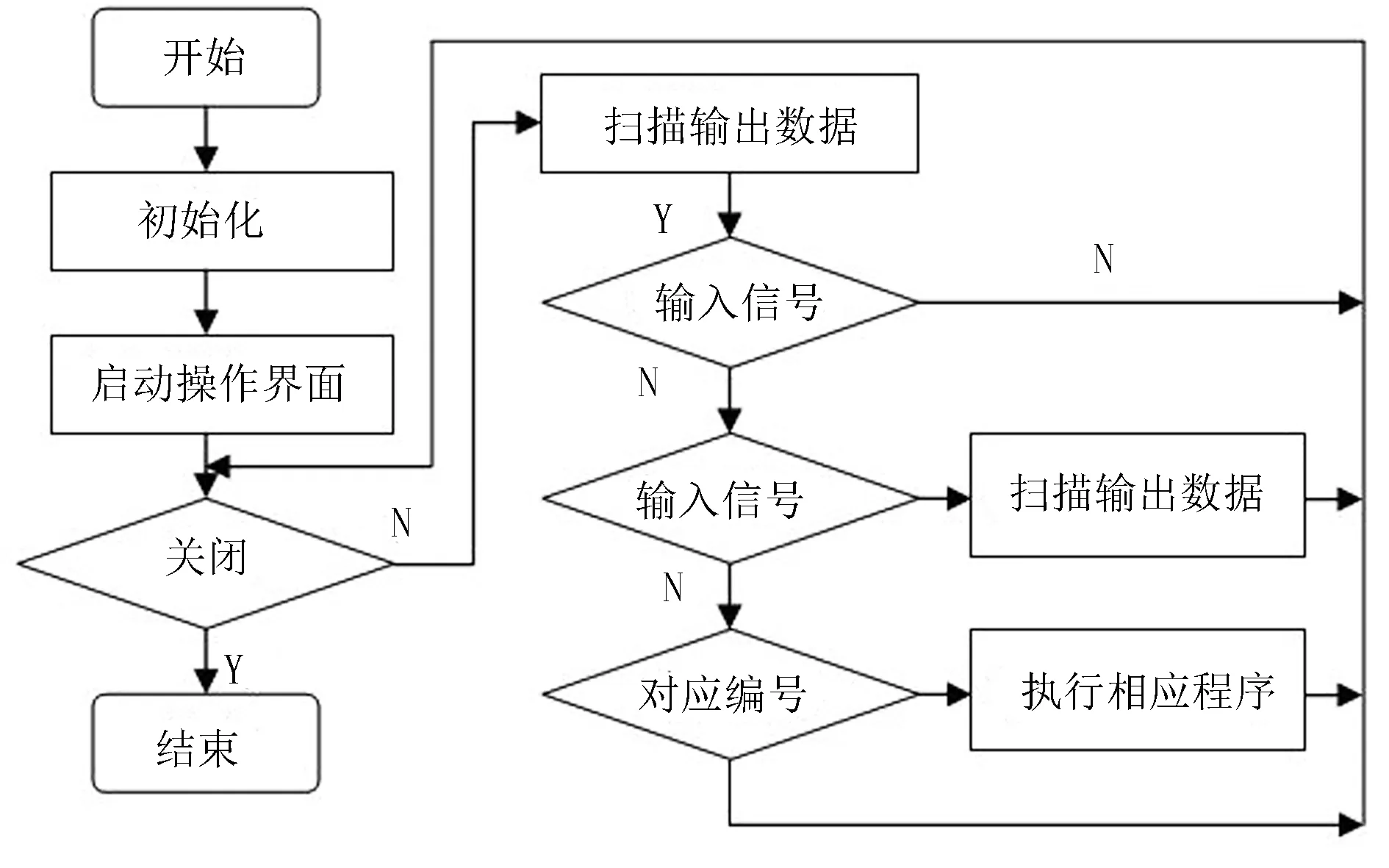
图5 主程序流程图
3 农业机器人灵巧手遥操作虚拟现实实验平台
3.1 虚拟现实环境建模
灵巧手虚拟现实环境采用计算机软件仿真模拟,借助虚拟建模软件搭建灵巧手作业环境,带给操作者视觉上的事实操作感觉。虚拟现实系统的操纵对象是农业机器人灵巧手和实时环境场景,灵巧手虚拟现实环境的对象是农业机器人灵巧手和目标物体。灵巧手虚拟现实环境建模结构如图6所示。
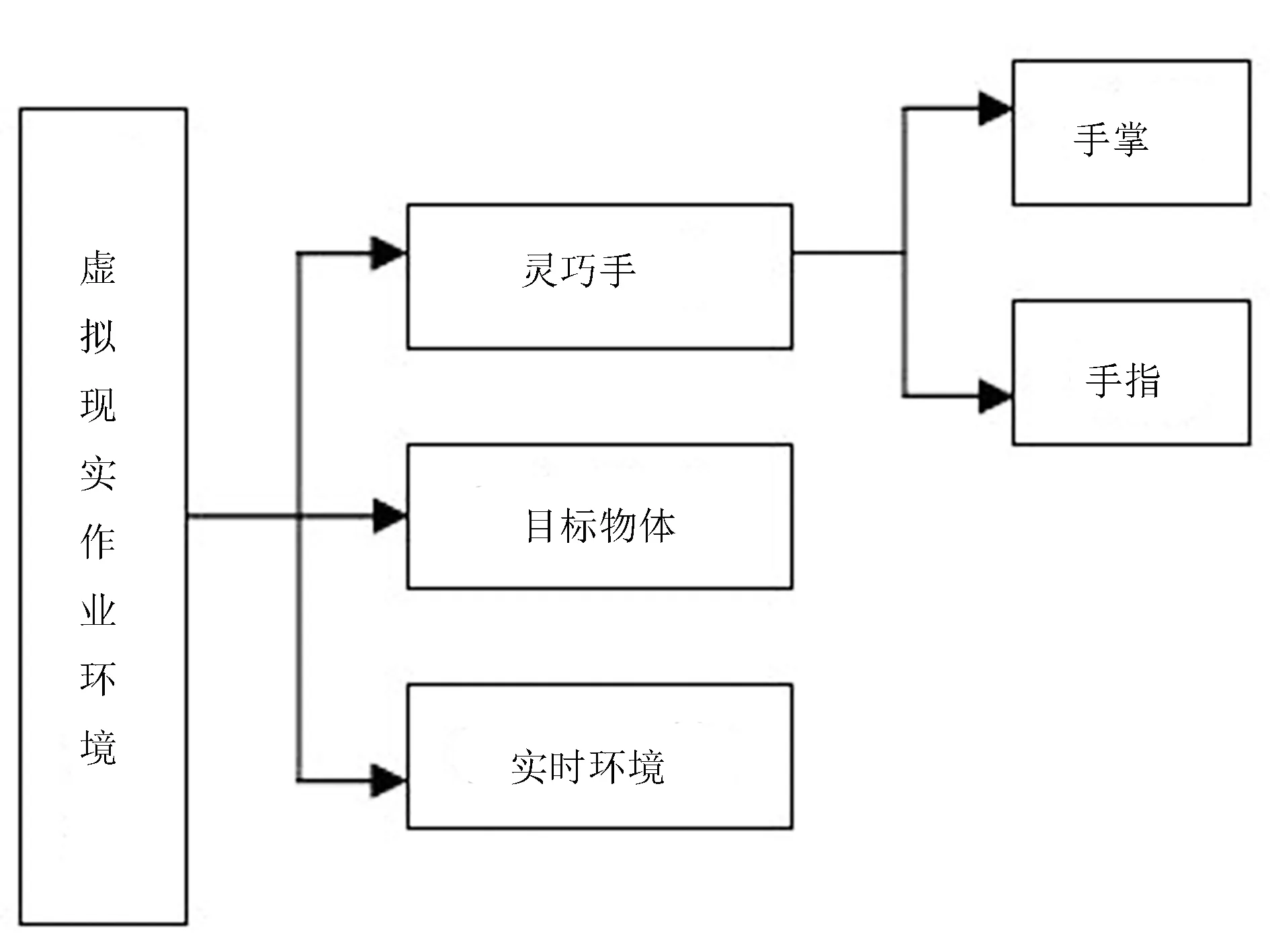
图6 灵巧手虚拟现实环境建模结构图
为了提高灵巧手虚拟现实操作环境的准确性,确保仿真系统的精确度,虚拟环境建模应该从几何环境和运动学两方面建立数学分析模型。本文利用三维仿真软件3D MAX对虚拟现实平台各部分模型进行仿真,根据场景物体的大小、形状、颜色、纹路及空间坐标进行定义,利用Python集成开发平台和Solidwork中3D数据库,将它们按运动学关系设计成新的整体构件。在组建新的构件过程中,定义构件的自由度、平移、移动速度等特性,并将整个虚拟环境的坐标原点定在农业机器人基关节的原点。将农业机器人机械臂、灵巧手掌、灵巧手指进行捆绑定义,让其形成一个控制链,并把作业对象和工作台加入虚拟现实场景中,使得构建的虚拟场景更具“沉浸性”。SolidWork设计的农业机器人灵巧手示意图如图7所示。

图7 农业机器人灵巧手示意图
3.2 建立灵巧手运动学数学模型
为了在虚拟现实实验平台中对农业机器人灵巧手进行有效的遥操作,建立灵巧手运动学数学模型是必须的。为了让灵巧手运动学模型清晰易懂,只对其单指结构进行分析。灵巧手单指模型如图8所示。
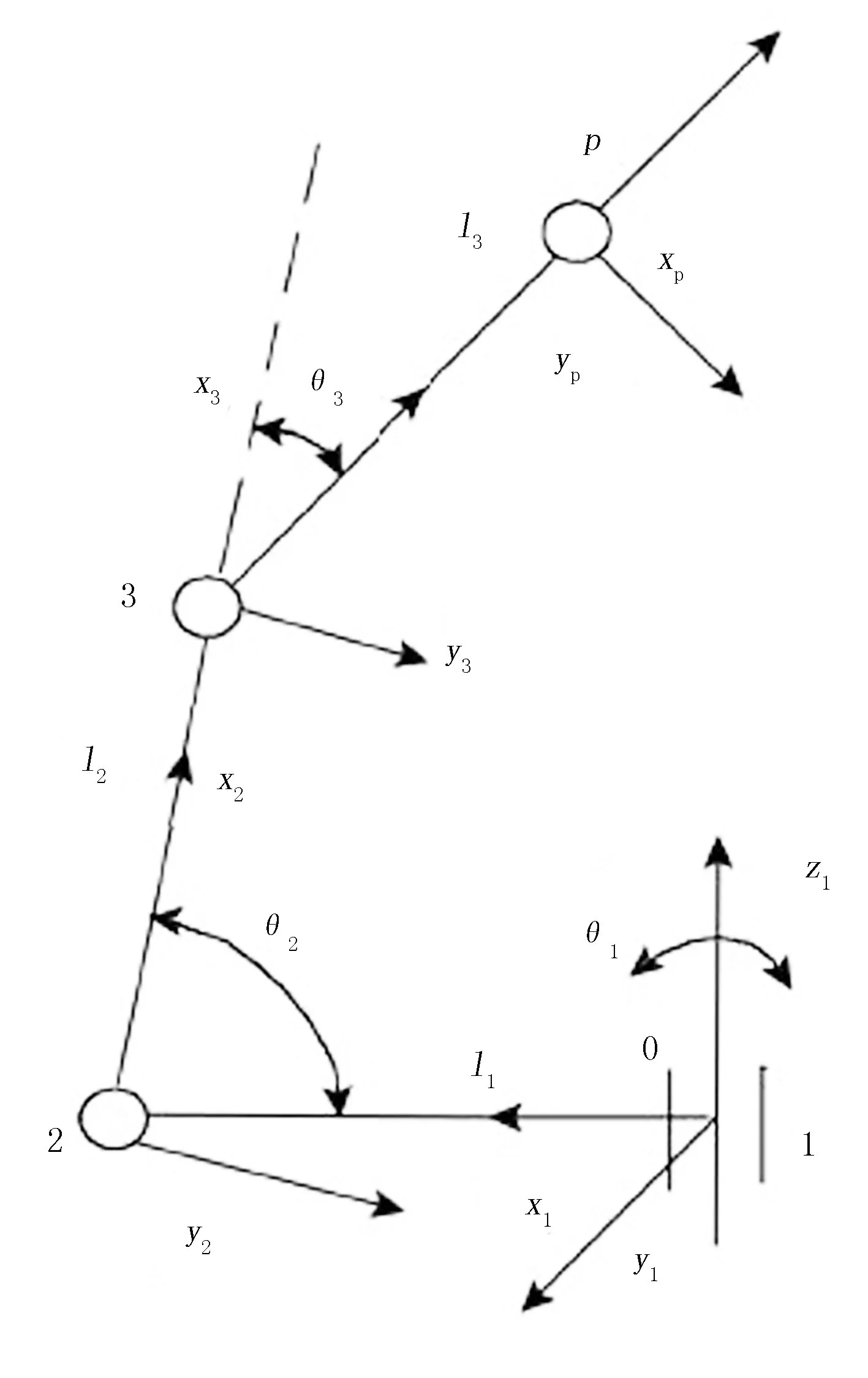
图8 灵巧手单指模型图
图8中,l1为根指关节长度;l2为中指关节长度;l3为端指关节的长度;θ1为x1oy1与绕z1旋转得到的角度;θ2为x2oy2绕z2旋转得到的角度;θ3为x3oy3绕z3旋转得到的角度。
p点在指根坐标系的齐次坐标位置为
(1)
(2)
(3)
(4)
(5)
4 LabVIEW上位机设计与实验
在整个虚拟现实试验平台中,主操作平台是1台基于Windows操作系统的计算机。在LabVIEW上位机操作界面中,有虚拟灵巧手的实时显示,还有作业虚拟场景,实时展示操作的过程。
LabVIEW上位机采用NI公司的LabVIEW软件进行设计,界面直观,操作方便。LabVIEW上位机登录界面前面板和底层图形程序如图9、图10所示。
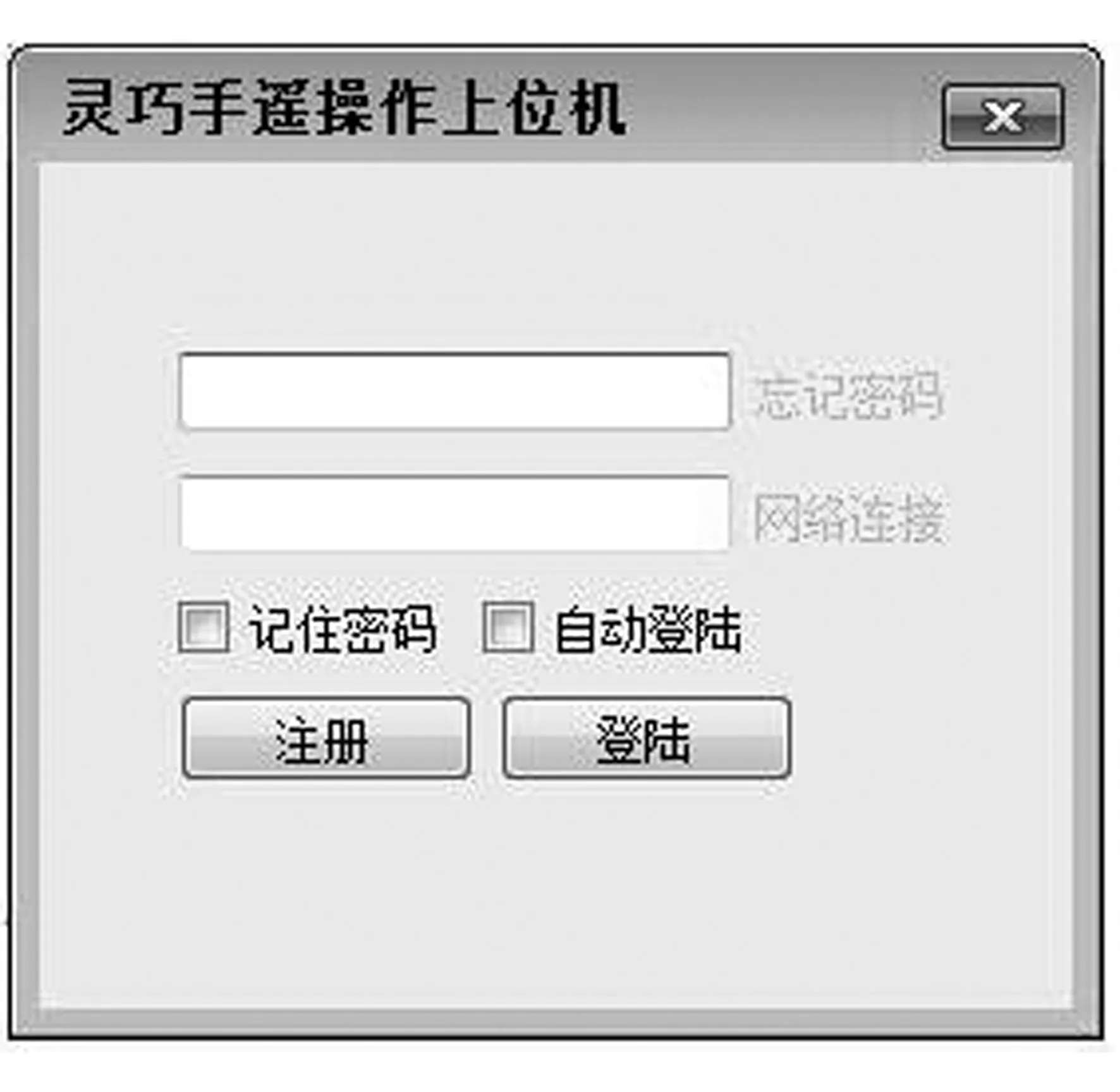
图9 登录界面前面板
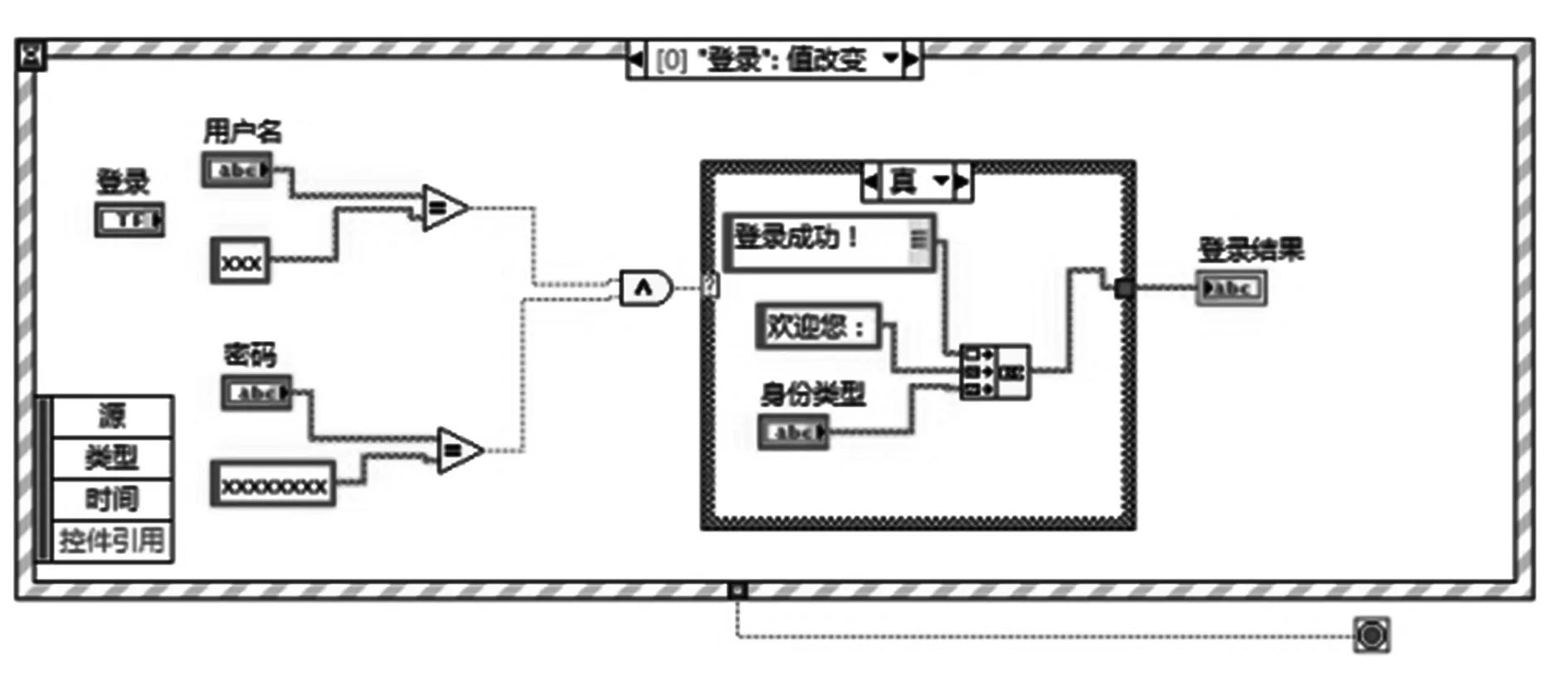
图10 登录界面底层图形程序
为验证本文设计农业机器人灵巧手遥操作虚拟现实实验平台的可靠性,利用LabVIEW上位机对虚拟灵巧手抓物体的特征与位姿进行了实验分析。根据整个抓取过程的预演,能够给操作人员进行遥操作采摘果实提供一定的参考线索。实验中,待抓取物体的尺寸为100mm(长度)×30mm(直径)的圆柱体。抓取实验仿真结果如图11所示。
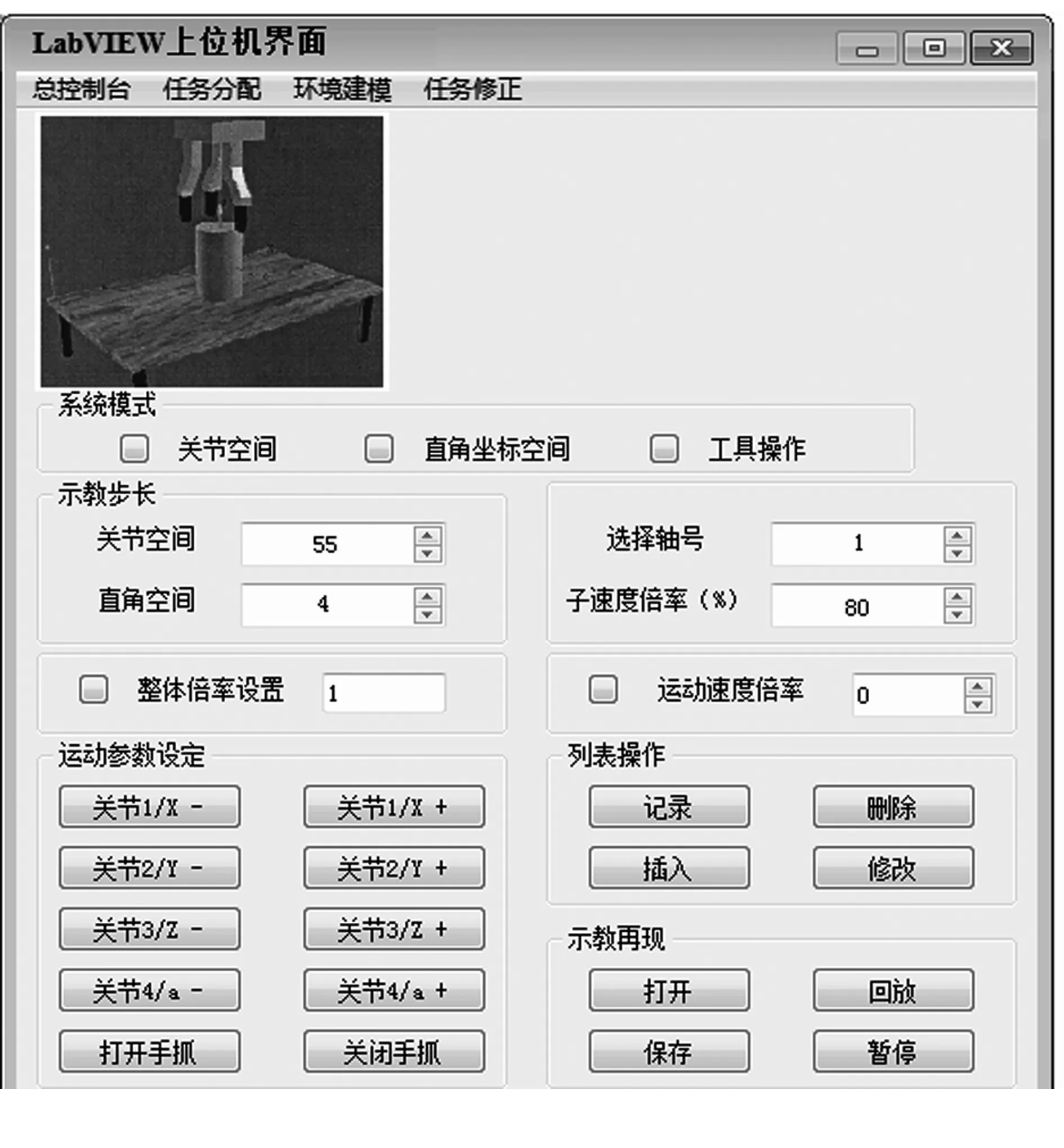
图11 抓取试验仿真结果图
由图11可以看出:农业机器人灵巧手可以准确抓取物体,且在整个过程中没有和其他物体发生碰撞。
5 结论
本文首先分析了虚拟现实技术的概念、应用领域及整个系统的组成架构;然后,对农业机器人灵巧手遥操作平台的软硬件进行了分析设计,进而搭建农业机器人灵巧手遥操作虚拟现实实验平台;最后,为了验证该平台的可靠性,利用LabVIEW上位机对虚拟灵巧手抓物体的特征与位姿进行了实验分析。结果表明:农业机器人灵巧手能够根据物体大小精准地抓取物体,可以满足农业机器人采摘作业要求。
