空间高精度太阳跟踪器设计与实现
2018-08-10曹倩石峰王宇徐彭梅
曹倩 石峰 王宇 徐彭梅
空间高精度太阳跟踪器设计与实现
曹倩 石峰 王宇 徐彭梅
(北京空间机电研究所,北京 100094)
文章通过对“高分五号”卫星大气环境红外甚高光谱探测仪太阳跟踪器的设计,探讨了航天器高精度高稳定度跟踪指向技术,提出了一种挠性枢轴支撑、音圈电机驱动的高精度跟踪机构设计方法。挠性枢轴传动环节无接触摩擦,能够实现较高精度的轴系支撑;音圈电机具有结构简单、便于控制的优点,适用于短行程快响应的高精度闭环伺服控制系统,同时满足航天产品轻质、可靠的设计要求。跟踪控制采用基于位置反馈的闭环控制实现太阳粗跟踪,结合图像信息反馈的闭环控制实现精跟踪。通过仿真分析和试验测试,验证了机构跟踪精度可达0.065mrad、跟踪稳定度可达14.2μrad。该设计方法可为空间相似载荷的跟踪、扫描系统提供借鉴。
跟踪机构 高精度 音圈电机 挠性枢轴 “高分五号”卫星
0 引言
随着航天遥感任务需求的不断提升,航天器所携带的载荷设备越来越精密,相应地对航天器指向精度、跟踪稳定度的要求也越来越高。国外现已有高精度、高稳定度、高敏捷指向能力的天文卫星、遥感卫星、激光通信卫星[1-2];美国新一代“詹姆斯-韦伯空间望远镜”(JWST),实现了指向精度优于6.5″,0.1s内指向稳定度为1″[3-4];NASA太阳系外行星探测计划之一的主动校正日冕仪(ACCESS)卫星本体姿态控制指向精度要求优于30″(偏航方向、俯仰方向、滚动方向),稳定度要求1 000s内优于0.1″[5]。中国“风云三号”卫星03星于2013年10月成功发射,太阳辐射监测仪为其主要载荷之一,俯仰在轨跟踪精度为0.029°,偏航在轨跟踪精度为0.025°[6-7]。
大气环境红外甚高光谱探测仪是“高分五号”高光谱观测卫星的主载荷之一,采用太阳掩星的探测方式获取经大气吸收的太阳辐射光,进而对大气进行高光谱、高信噪比、宽波段范围的精细探测,获取不同高度大气的成分和浓度分布。探测仪工作时需要对太阳质心进行非常精确的跟踪,并将太阳入射光引入探测仪。
本文针对“高分五号”(GF-5)卫星大气环境红外甚高光谱探测仪(以下简称红外甚高探测仪)太阳跟踪器,探讨高精度太阳跟踪器的设计与实现,主要内容包括机构轴系支撑和驱动、活动部件锁定、高精度控制系统的设计与实现等。
1 太阳跟踪器系统概述
太阳相对于“高分五号”卫星载荷为二维运动,因此太阳跟踪器需要实现两维摆动,关键性能指标要求如下:
1)通光口径:≥168mm(长轴),≥136mm(短轴);
2)跟踪角度:–3.2°~3.2°(俯仰轴),–6.43°~6.43°(偏转轴);
3)锁定状态下机构基频:≥120Hz;
4)指向精度:优于0.1mrad;
5)跟踪稳定度:100s内优于15μrad。
红外甚高探测仪太阳跟踪器的主要功能是实现稳定精确的太阳质心跟踪,并将太阳光引入探测仪,是探测仪的关键组成。太阳跟踪器由太阳跟踪机构、太阳跟踪相机、太阳跟踪控制器组成。太阳跟踪相机的主要功能是为跟踪控制器提供太阳图像数据;太阳跟踪机构主要用于保证指向镜的运动能力,并实现各零部件之间的位置保持功能;跟踪控制器控制跟踪机构实现各种预定的动作和功能,最终实现对日跟踪。太阳跟踪器组成如图1所示,其工作原理为:首先跟踪控制器根据给定的太阳矢量驱动跟踪机构,实现太阳粗跟踪;然后太阳跟踪相机获取太阳图像,并将图像数据传输至跟踪控制器;跟踪控制器根据太阳图像数据,驱动太阳跟踪机构完成太阳精跟踪,同时将太阳光线引入探测仪。

图1 太阳跟踪器系统组成
由上述关键性能指标要求和系统工作原理可知,该太阳跟踪器两轴运动范围要求均较小,但具有较高的指向精度和跟踪稳定度要求。太阳跟踪相机自成体系,其输出图像数据作为太阳跟踪控制器的输入条件,由于篇幅有限,本文暂不讨论太阳跟踪相机的具体实现理论和方法。重点围绕机构轴系精度、结构稳定度及指向控制精度展开分析,主要涉及机构轴系支撑设计、驱动器件选取、控制策略设计等内容。
2 跟踪机构设计与实现
太阳跟踪机构是太阳跟踪器的核心部分,用于保证指向镜的运动能力和各零部件之间的位置保持,机构的三维模型如图2所示。指向镜设计为四边倒角的矩形,留出一定的加工塌边量和装调余量,最终长边设计尺寸为178mm,短边设计尺寸为146mm。太阳跟踪机构采用内环俯仰和外环偏转串联的机构形式,这种结构形式可以实现内外环转动方向的完全解耦,便于控制[8]。
2.1 支撑方式设计
传统的转动轴系设计中多采用滚动轴承作为结构支撑部件,但滚动轴承一般适用于轴系整周旋转,或轴承中滚动体整周旋转且均匀受力的工况。当轴系摆动速度较低时滚动轴承易产生爬移现象,将对系统精度产生较大影响[9-10];且轴系运动范围较小时,轴承中滚动体在长期非整周受力情况下,寿命也会受到严重影响。
挠性枢轴是一种常用于航空、航天领域内的高精密轴系支撑装置[11],其内部由十字交叉片簧组成,片簧两端分别连接在固定轴段和旋转轴段,内部结构如图3所示。挠性枢轴工作时无接触摩擦力或摩擦力矩,无需采用任何润滑措施,轴系扭转阻力矩仅与枢轴扭转刚度和转动角度相关,不受温度、压强等环境因素影响,特别适用于宇航环境中小摆角机构的轴系支撑。
本文设计的太阳跟踪机构内外环采用了挠性枢轴支撑方式,为避免枢轴在卫星发射振动环境及在轨长期工作过程中松动,安装枢轴时应实施放松措施,本设计采用预压放松。预压防松时预压量视枢轴大小、型号及其负载确定,通常限制范围为0.01mm~0.02mm。计算枢轴承载安全系数时,需将预压(0.01~0.02mm)产生的预压力作为枢轴的负载考虑;同时轴系结构加工误差、组件装配误差导致的强迫力也应作为枢轴的负载考虑。

图2 太阳跟踪机构三维模型
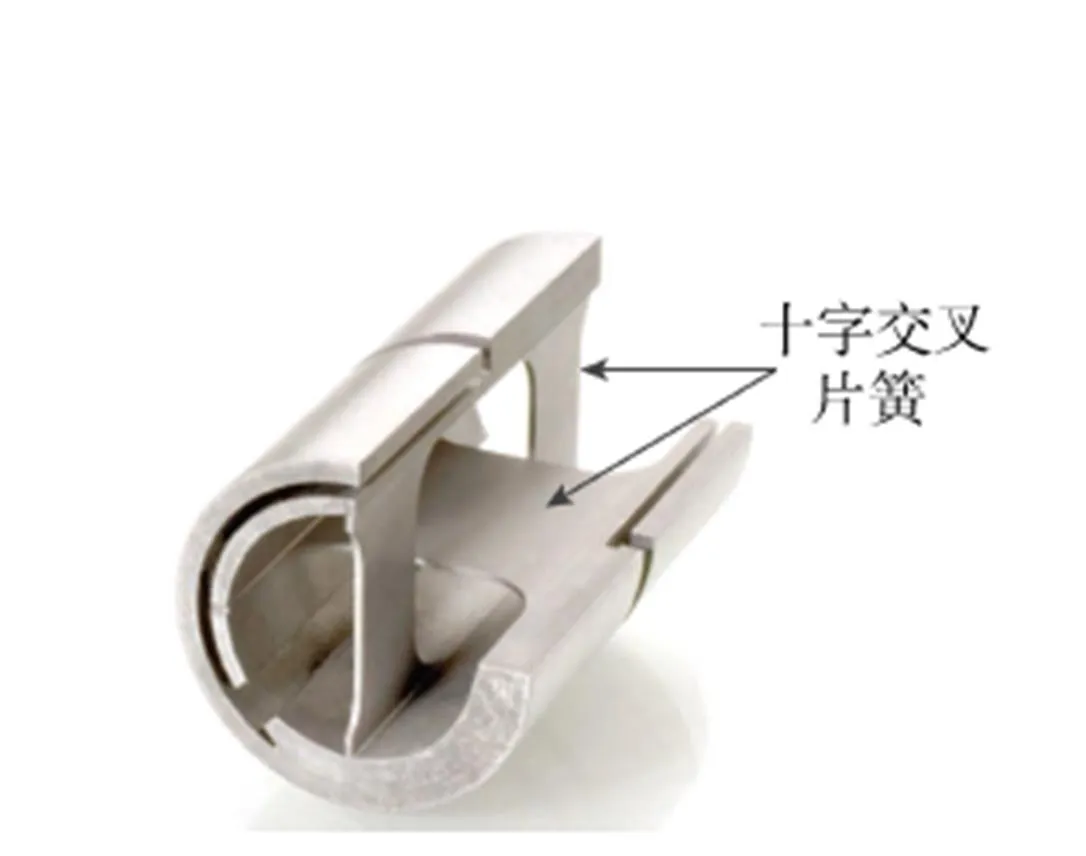
图3 挠性枢轴内部结构示意
2.2 驱动部件选取
太阳跟踪机构需要驱动指向镜在一定角度范围内有规律的摆动,其运动形式特点在于:首先指向镜运动限定为有限角度(–7º~+7º)范围内的往复摆动;其次轴系负载不是传统轴系中的轴承摩擦力矩,而是与摆角正相关的弹性扭矩;且由于指向镜转速很低,使其两轴惯性负载极小。因此要求驱动部件工作时输出力矩大小可调节,且对驱动部件输出力矩的波动有极其严格的要求,否则轴系的运动精度将受到直接影响[12-14]。
旋转式音圈电机是一种结构特殊的有限转角电机,兼具力矩电机的特点,同时满足航天产品小型轻量的要求[15],其外形及内部结构如图4所示。因其工作原理与扬声器类似而得名,其工作原理即是安培原理,通电线圈(导体)放在磁场内产生力,力的大小与线圈内的电流成正比。音圈电机将电能直接转换成机械能,省去了中间转换机构,具有体积小、质量轻、响应快等一系列优点[16],在地面一些精密定位系统、高加速领域中得到了广泛的应用,如磁盘定位、光学透镜定位等[17]。

图4 旋转式音圈电机结构示意
由上所述,太阳跟踪机构两轴均选用音圈电机作为有限摆角往复运动的驱动部件,无需换向装置,结构简单,可靠性高;自身转动惯量小,加速度大、响应快;无齿槽效应,控制定位精度高;特别适用于短行程快响应的高精度闭环伺服控制系统。
2.3 轴系力矩裕度设计
轴系力矩裕度包括静力矩裕度和动力矩裕度,前者保证轴系由静止状态变化到运动状态,后者保证轴系运动参数满足工况要求。
机构轴系静力矩裕度j可表示为

机构轴系动力矩裕度d可表示为
式中o为驱动部件大输出扭矩;q为轴系动惯性力矩;f为轴系的最大阻力矩。
对于滚动轴承支撑的轴系设计,轴系负载源于滚动轴承产生的摩擦力矩,此摩擦力矩受安装方式、轴承预紧量、环境温度、润滑方式等诸多因素影响,导致其实际摩擦力矩与设计值偏差较大。因此对于滚动轴承支撑的轴系,一般要求静力矩裕度不小于3。
太阳跟踪机构其内外环均采用挠性枢轴支撑方式,不同于滚动轴承支撑轴系设计,无摩擦力或摩擦力矩,无任何润滑措施,轴系负载仅与枢轴扭转刚度和转动角度正相关,不受温度、压强等环境因素影响。因此轴系的驱动电机仅需克服枢轴产生的阻扭矩,此阻扭矩可以通过实测准确获得。
同时太阳跟踪器要满足指向精度优于0.1mrad,100s跟踪稳定度优于15μrad的指标要求。跟踪控制器采用脉冲宽度调制(PWM)的方式控制两轴电机实现驱动,系统控制细分量一定的情况下,轴系力矩裕度越大,可达的指向精度和跟踪稳定度越低[18-19]。根据系统精度误差分析,当轴系静力矩裕度大于2时,控制系统已无法保证跟踪精度指标要求。因此综合考虑系统指向精度、跟踪稳定度和活动部件可靠性,太阳跟踪机构两轴轴系静力矩裕度均设计为1.5。
2.4 轴系设计
太阳跟踪机构由内环组件、外环组件组成,内环组件和外环组件实现原理相同,组成类似,均主要由负载组件、音圈电机、旋变等部件组成。内环组件结构、外环组件结构如图5所示。负载组件通过挠性枢轴与固定框相连;电机转子和旋变转子等通过转轴与负载组件连接;电机定子和旋变定子通过转接件安装在固定结构上,从而实现电机驱动负载转动,旋转变压器具有反馈角位置信息的功能。其中内环组件的负载为指向镜,外环组件的负载为内环组件;内环组件的固定结构为镜框,外环组件的固定结构为机构基座。

图5 内外环组件结构示意
2.5 锁定组件设计
由于挠性枢轴承载能力有限,在发射阶段的振动环境下容易造成破坏,因此针对太阳跟踪机构内外环的运动部件,设计了锁定组件,如图6所示。其工作原理为:锁定时步进电机正转驱动大锥齿轮,小锥齿轮与大锥齿轮啮合传动,直线单元转旋转运动为直线运动,驱动锥尖顶杆平移前进,直至顶杆锥尖插入活动部件的锥窝,到位后步进电机断电完成锁定动作。解锁时步进电机加电反转,传动过程与加锁时一致,带动顶杆锥尖后退拔出锥窝,到位后即完成解锁。

图6 锁定组件结构示意
锁定组件中电机的扭矩负荷主要包括两部分:1)由锁定组件负荷引起的摩擦扭矩1;2)电机机构加速启动时所需的扭矩2;

式中a为轴向负荷,即滚珠丝杠的摩擦力;为滚珠丝杠及锥齿轮副导程;为滚珠丝杠及锥齿轮传动效率。

式中为锁定组件的负载惯性矩;为锁定组件的负载质量;s为丝杠的惯性矩;A为齿轮的惯性距;为转动加速度。
由上述公式求得锁定组件的总扭矩负荷=1+2。
根据电机驱动力矩进一步求得锁定组件的锁定安全系数为25.8,解锁安全系数为85.8,满足可靠性设计要求。
3 跟踪控制器设计与实现
太阳跟踪器的最终任务是通过接收太阳图像实现对日精确、稳定地跟踪,但在日出前没有太阳图像时,需要跟踪器实时响应太阳矢量的方向,保证在日出后能够及时实现对日跟踪。因此入轨后的对日跟踪过程可以分为粗跟踪(矢量跟踪)和精跟踪(图像跟踪)两个过程,如图7所示,图中0表示卫星出阴影的时刻。

图7 控制系统工作流程
太阳跟踪控制器采用基于位置反馈的闭环控制实现太阳粗跟踪,结合基于图像信息反馈的闭环控制实现太阳精跟踪。高精度旋转变压器实时反馈两轴位置信息,其电气误差为±15″。太阳跟踪相机捕获太阳图像数据,用于系统精跟踪闭环控制输入。太阳跟踪器功能实现原理如图8所示。
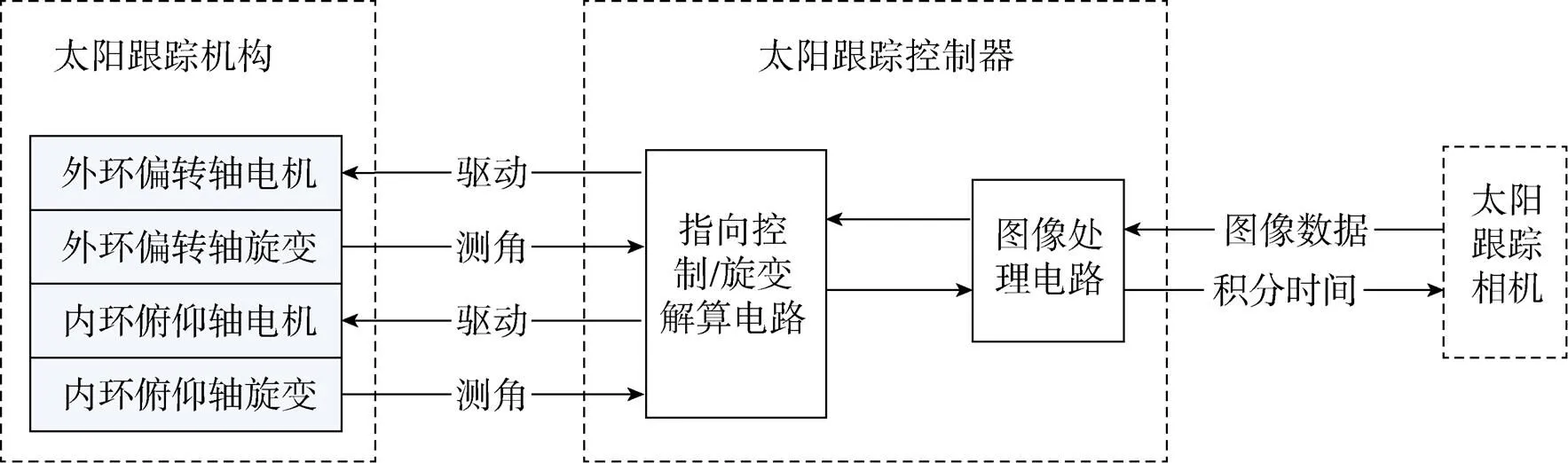
图8 太阳跟踪器功能实现原理示意
3.1 粗跟踪工作流程
为实现探测仪入轨后的掩星探测,太阳跟踪系统需在卫星出阴影前开机工作。此时太阳在地平面以下,跟踪相机无法获取太阳图像。跟踪系统利用卫星发送的太阳矢量,实时计算跟踪机构两轴转角信息,控制跟踪机构指向日出方向,随时准备日出后的精跟踪。为了减少力矩波动,提高定位控制精度,跟踪控制器选择PWM控制方法,控制电路将旋转变压器给出的位置信号转换为角位置信息和角速度信息,在位置回路校正网络和速度回路校正网络中对控制量进行校正。校正结果利用PWM驱动器件完成电机的实时、准确控制。粗跟踪工作流程如图9所示。
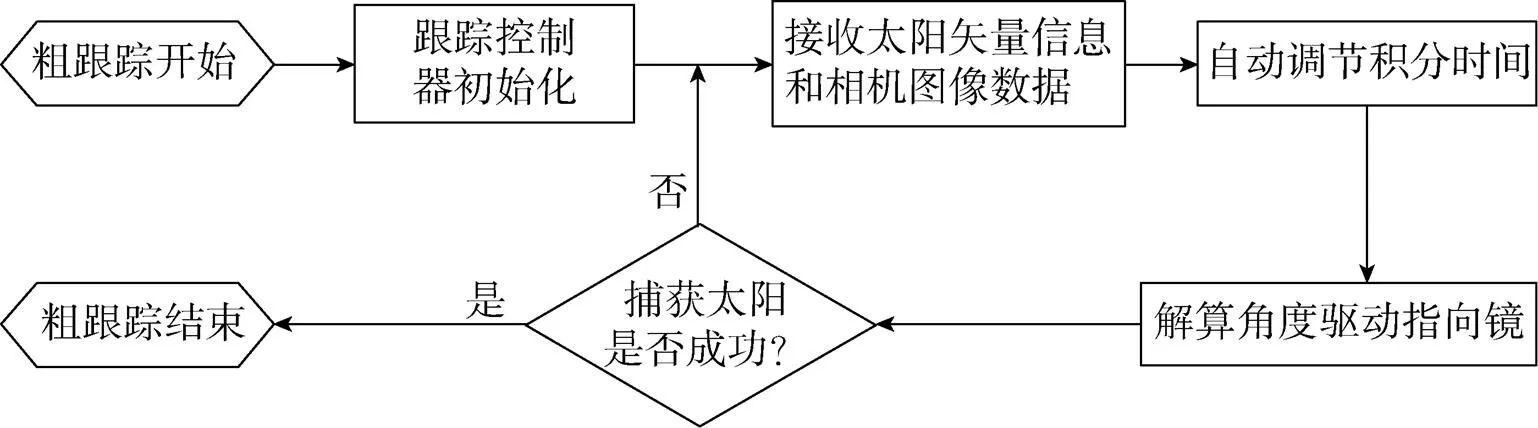
图9 粗跟踪控制工作流程
3.2 精跟踪工作流程
日出后,跟踪相机采集到太阳图像,并将数据及时发送到跟踪控制器。跟踪控制器根据实时接收的图像数据进行判断,当认为图像中出现太阳信息时,开始进入基于图像闭环控制的精跟踪。为保证精跟踪的精度和稳定度,跟踪相机需要提供25帧/s的太阳图像,跟踪控制器根据太阳图像对太阳轮廓进行辨识并计算太阳质心位置,进而实现对太阳质心的精确、稳定跟踪。精跟踪工作流程如图10所示。

图10 精跟踪控制工作流程
4 有限元分析及试验验证
4.1 机构有限元分析
太阳跟踪机构设计总质量为8.8kg,内外的主要结构物理特性、负载扭矩及电机主要性能参数如表1所示。
表1 轴系结构关键参数

Tab.1 Key parameters of sun-tracking mechanism
对机构进行了有限元建模,如图11所示,各部件之间的螺栓连接采用Rbe2单元来实现,节点总数为228 878。图12为机构约束状态下的第1~6阶模态,机构的第1阶频率为135Hz,满足设计指标要求。图11、图12中向为机构俯仰轴线方向,向为机构偏转轴线方向,向垂直于、向。

图11 机构有限元模型

图12 机构约束状态下第1~6阶模态
4.2 试验验证
对太阳跟踪机构进行鉴定级振动试验,对振动前后的结构基频进行了对比,对比数据如表2所示。可见,振动试验前后机构、、Z方向频率漂移分别为0.96%、2.37%和0.48%,均满足要求。振动试验1阶频率与仿真分析结果相符,满足基频≥120Hz的指标要求,验证了太阳跟踪机构的结构稳定性。
表2 机构振动前后的基频对比结果

Tab.2 Comparison of fundamental frequencies
同时振动试验前后对太阳跟踪器指向精度和跟踪稳定度进行了测试,测试结果见表3。由表中数据可知,振动试验前后指向精度最大值为0.065mrad,跟踪稳定度最大值为14.2μrad,均满足技术要求。
表3 指向精度和跟踪稳定度测试结果

Tab.3 Test results of tracking accuracy and stability
5 结论
本文针对“高分五号”卫星大气环境红外甚高光谱探测仪太阳跟踪器,探讨航天器高精度高稳定度跟踪指向技术,对其高精度轴系支撑、轴系驱动、活动部件锁定、跟踪控制等技术进行了研究,并得出以下结论:
1)设计了挠性枢轴支撑、音圈电机驱动的二维太阳跟踪机构;挠性枢轴无接触摩擦、无需润滑措施,负载不受温度、压强等环境因素影响;音圈电机结构简单、自身转动惯量小、响应快;并设计了锁定组件,实现了高精度小摆角空间二维机构;
2)设计了高精度跟踪伺服控制系统,实现了基于位置反馈的闭环粗跟踪和基于图像信息反馈的闭环精跟踪;
3)通过仿真分析和试验测试,验证了机构的稳定性,以及系统指向精度达0.065mrad,跟踪稳定度达14.2μrad,满足技术要求;
4)上述技术适用于航天产品中运动范围要求(–7º~+7º)的高精度跟踪设计与实现。
[1] 徐广德, 武江凯, 苟仲秋, 等. 国外航天器高精度高稳定度高敏捷指向技术综述[J]. 航天器工程, 2017, 26(1): 91-99. XU Guangde, WU Jiangkai, GOU Zhongqiu, et al. High Accuracy High Stability and High Agility Pointing Technology of Spacecraft[J]. Spacecraft Engineering, 2017, 26(1): 91-99. (Chinese)
[2] 从强, 罗敏, 李伟杰. 空间机构技术发展趋势及展望[J]. 载人航天, 2016, 22(1): 1-8. CONG Qiang, LUO Min, LI Weijie. Development Trends and Prospects of Space Mechanism[J]. Manned Spaceflight, 2016, 22(1): 1-8. (Chinese)
[3] NELLA J, ATCHESON P, ATKINSON C, et a1. James Webb Space Telescope (JWST) Observatory Architeeture and Performance[C]//Proceedings of SPIE. Bellingham: SPIE, 2004.
[4] MEZA L, TUNG F, ANANDAKRISHNAN S, et a1. Line of Sight Stabilization of James Webb Space Telescope[C]//27th Annual AAS Guidance and Control Conference. San Diego, CA: AAS, 2005.
[5] SOMOV Y, SIGUERDIDJANE H, FEDOSOV V. Precise Nonius Guidance and Image Stabilization of A Large Space Telescope[C]//2011 5th International Conference on Recent Advances in Space Technologies. Istanbul: RAST, 2011: 869-874.
[6] 王玉鹏, 王凯, 贾瑞栋, 等. 精指向自解锁星载太阳指向器设计与应用[J]. 光学精密工程, 2016, 24(1): 65-72. WANG Yupeng, WANG Kai, JIA Ruidong, et al. Design and Application of Accurate Pointing and Auto-unlocking Sun Tracker on Satellite[J]. Optics and Precision Engineering, 2016, 24(1): 65-72. (Chinese)
[7] 杨东军, 方伟, 叶新, 等. 星载太阳辐射监测仪的高精度太阳跟踪[J]. 光学精密工程, 2014, 22(9): 2483-2490. YANG Dongjun, FANG Wei, YE Xin, et al. High Precision Sun-tracking of Spaceborne Solar Irradiance Monito[J]. Optics and Precision Engineering, 2014, 22(9): 2483-2490. (Chinese)
[8] 付智红, 王黎明, 刘冰. 高精度星载点目标轨迹跟踪系统设计[J]. 计算机测量与控制, 2016, 24(8): 252-271. FU Zhihong, WANG Liming, LIU Bing. Design of High Precision Space-borne Point-target Trajectory Tracking System[J]. Computer Measurement & Control, 2016, 24(8): 252-271. (Chinese)
[9] 李向华, 许黎明, 钱志源. 星载天线指向机构指向精度及速度稳定度的测量[J]. 机械与电子, 2011 (10): 37-40. LI Xianghua, XU Liming, QIAN Zhiyuan. Measurement on the Pointing Accuracy and Velocity Stability for an Antenna Pointing Mechanism[J]. Machinery & Electronics, 2011 (10): 37-40. (Chinese)
[10] 万小平. 一种天线指向机构的指向精度分析[J]. 空间电子技术, 2016, 13(5): 71-75. WAN Xiaoping. Pointing Accuracy Analysis of an Antenna Pointing Mechanism[J]. Space Electronic Technology, 2016, 13(5): 71-75. (Chinese)
[11] 罗渠, 袁立, 杨磊, 等. 一种驱动扫描镜扫描运动的方法[J]. 航天返回与遥感, 2006, 27(1): 36-41. LUO Qu, YUAN Li, YANG Lei, et al. A Method for Driving Scan Mirror[J]. Spacecraft Recovery & Remote Sensing, 2006, 27(1): 36-41. (Chinese)
[12] 王淳, 谢妮慧, 林喆. Delta-Sigma调制器在空间指向镜位置伺服系统中的应用[J]. 航天返回与遥感, 2014, 35(5): 54-60. WANG Chun, XIE Nihui, LIN Zhe. Application of Delta-Sigma Modulator in Space Pointer Mirror Position Servo System[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(5): 54-60. (Chinese)
[13] GODBOLE K. 理解并控制数字马达控制系统的量化误差[J]. 电子设计应用, 2006 (9): 106-110. GODBOLE K. Understanding and Managing Quantization Errors in Digital Motor Control System[J]. Electronic Design & Application World, 2006 (9): 106-110. (Chinese)
[14] 董天舒, 何英姿. 基于增益分配的航天器高精度指向跟踪控制[J]. 航天控制, 2016, 34(1): 50-56 DONG Tianshu, HE Yingzi. A High Precision Attitude Pointing Tracking Control for Spacecraft Based on the Gain Schedule[J]. Aerospace Control, 2016, 34(1): 50-56. (Chinese)
[15] 张大卫, 冯晓梅. 音圈电机的技术原理[J]. 中北大学学报, 2006, 27(3): 225-228. ZHANG Dawei, FENG Xiaomei. The Technical Principle of Voice-coil Actuator[J]. Journal of North University of China, 2006, 27(3): 225-228. (Chinese)
[16] 徐新行, 王兵, 韩旭东, 等. 音圈电机驱动的球面副支撑式快速控制反射镜设计[J]. 光学精密工程, 2011, 19(6): 1320-1324. XU Xinhang, WANG Bing, HAN Xudong, et al. Design of Fast-steering Mirror with Spherical Pair Supporting Structure Driven by Voice Coil Actuators[J]. Optics and Precision Engineering, 2011, 19(6): 1320-1324. (Chinese)
[17] 兴连国, 周惠兴, 侯书林, 等. 音圈电机研究及应用综述[J]. 微电机, 2011, 44(8): 83-88. XING Lianguo, ZHOU Huixing, HOU Shulin, et al. Research and Application of Voice Coil Motor[J]. Micromotors, 2011, 44(8): 83-88. (Chinese)
[18] 聂涛, 张世杰, 赵亚飞, 等. 图像信息反馈的目标航天器跟踪控制方法[J]. 宇航学报, 2016, 37(7): 829-838. NIE Tao, ZHANG Shijie, ZHAO Yafei, et al. Target Spacecraft Tracking Control Based on Image Information[J]. Journal of Astronautics, 2016, 37(7): 829-838. (Chinese)
[19] 朱鸿泰, 孙胜利, 陈桂林. 基于CMOS APS高精度太阳敏感器[J]. 技术与应用, 2006, 12(9): 26-29. ZHU Hongtai, SUN Shengli, CHEN Guilin. High Precision Sun Sensor Based on CMOS APS[J]. Technology & Application, 2006, 12(9): 26-29. (Chinese)
[20] 陈世平. 空间相机设计与实验[M]. 北京: 宇航出版社, 2003. CHEN Shiping. Design and Experiment of Space Camera[M]. Beijing: China Astronautics Press, 2003. (Chinese)
Design and Implementation of Space High Precision Sun-tracking System
CAO Qian SHI Feng WANG Yu XU Pengmei
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
Key technologies of space high precision sun-tracking system applied in GF-5 satellite are researched in this paper. A tracking mechanism supported by two flexural pivots and driven by a voice coil motor is designed. Flexural pivot is one kind of frictionless, stiction-free bearing, ideally suited for high precision tracking mechanism. Voice coil motor has a simple structure without any structure for reversing, and is easy to be controlled. In the system control strategy, an initial tracking is combined with a final tracking, that is, a closed-loop control based on position feedback does the initial sun tracking, and then a closed-loop control based on image information feedback accomplishes the final sun tracking. The system can reach the tracking accuracy of up to 0.065mrad, and the tracking stability of up to 14.2μrad, which is proved by some tests in the end. This method is suitable for many similar tracking and scanning system in space products.
tracking mechanism; high precision; voice coil motor; flexural pivot; GF-5 satellite
V476.4
A
1009-8518(2018)03-0070-10
10.3969/j.issn.1009-8518.2018.03.008
曹倩,女,1984年生,2010年获北京邮电大学机械设计及理论专业硕士学位,高级工程师。研究方向为空间光学遥感机构。E-mail:271673978@qq.com。
2018-04-08
国家重大科技专项工程
(编辑:王丽霞)