基于参数自整定模糊PID算法的平地机行走速度优化控制系统设计
2018-08-09吴廷强熊中刚罗德莲
吴廷强,熊中刚,2*,罗德莲
( 1.遵义师范学院 工学院,贵州 遵义 563002;2.贵州省电子电工实验示范研究中心,贵州 遵义 563002)
0 引言
我国是农业大国,机械化平地对大面积农业生产种植至关重要,而最重要的机械化工具是平地机,平地机是一种以铲刀为主的土地平整和整形作业的施工机械,并有多种可换作业装置[1,2].
平地机可以在较短时间完成大面积的田地平整作业,可以有效提高平地效率,并节省了人力和物力,减轻了农民的负担[3,4],同时平地机是一个具有高度复杂特性的非线性系统,在工作过程中,平地机作业时受到不同大小土块和地形的影响,系统许多参数是随时改变的,使其速度达不到精准控制的目的,因此平地机作业的优化设计具有重要的意义[5,6].
同时,速度控制存在一定的滞后性,特别是在丘陵地形作业时,地形起伏较大,对平地机的稳定作业适应性提出了更高的要求,可靠性要求也较高[7].为此,本文研究了基于参数自整定模糊PID算法的平地机行走速度优化控制系统设计,以期达到对速度的稳定、高效和精准控制的目的.
1 系统总体组成及其工作原理
主要针对液力机械传动型平地机进行行走控制系统的研究.目的是实现平地机作业时根据行走状态参数进行速度优化控制[8].控制系统总体组成框图如图1所示,主要由耕地平整度信号检测模块、信号调理模块、中央控制器、调速执行机构、行走系统、行进速度检测模块、电源模块、液晶显示模块、参数设置模块和报警模块组成.
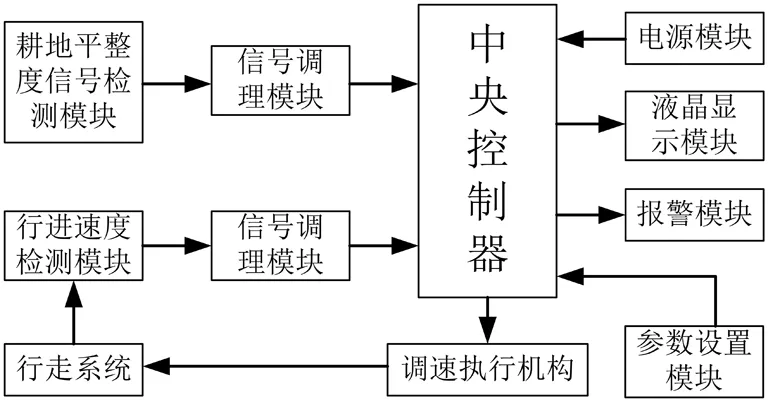
图1 系统组成框图Fig. 1 The composition block diagram of system
系统设计中为实现平地机速度的优化控制,需要对发动机油门开度(转速)进行实时数据采集,经由参数自整定模糊PID算法对实时检测参数和设定值进行比较后输出,采用闭环系统反馈调节的方法通过不断的迭代计算,实现最低控制误差完成对速度的优化配置,从而能够经由控制时间的缩短完成对控制精度提高的目的.
2 平地机行走速度的参数自整定模糊PID控制器设计
平地机的行走系统比较复杂,同时具有滞后性、时变性和非线性等特点[9],所以建立精确的能够适时调节控制系统的数学模型很困难,故而根据系统工作需求特点,采用集合论、语言变量和逻辑推理等特性的模糊算法实现计算机的有效控制[10].
2.1 模糊控制系统的建立
根据平地机行走系统作业速度控制要求,针对系统实现控制的主要目的是能够通过检测发动机的实际转速完成稳定控制[11],为了提高系统的控制精度,本文设计中采用参数自整定模糊PID控制的平地机行走速度控制系统,如图2所示.
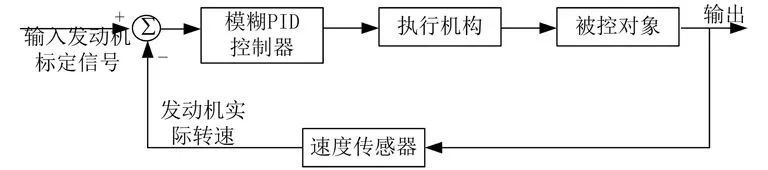
图2 平地机的速度模糊控制系统Fig. 2 The speed fuzzy control system of motor
2.2 参数自整定模糊PID控制器的设计
本系统根据平地机作业时的特点,行走速度控制系统选择能够满足控制精度要求的二维模糊控制器,因为平地机作业时环境变化复杂,产生的输入偏差控制量有大小变化,因此需要能够随偏差变化而随动变化的控制器,即需要采用能进行PID参数自整定的模糊PID控制器[12],完成对变量的调节控制,从而有效保持系统稳定性以及动态响应效果,如图3所示为模糊PID自整定控制器.
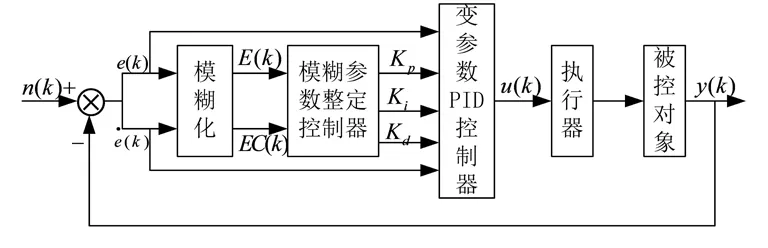
图3 自整定模糊PID控制器流程图Fig. 3 The flow chart of self-tuning fuzzy PID controller
2.3 输入输出控制变量的模糊化
本文所设计的模糊控制系统以输入发动机的转速标定信号和检测的发动机实际转速之间的差值作为输入变量误差E,同时以发动机转速差的变化率EC作为模糊参数整定控制器的输入量.为实现变参数自整定控制,设定变参数PID控制器的输入变量为kP、kI和kD,y(k)为模糊控制的输出值,根据输出值U(k)的变化情况,通过模糊控制规则完成变量大小调节.根据设计需求所得的相应数学模型为:
u(k)=[kP+kI]·e(k)+kD·[ec(k)-
ec(k-1)]+u(k-1),
式中:u(k) 为控制器的输出值,发动机转速的偏差值为e(k),转速偏差增量为ec(k)=e(k)-e(k-1),kP、kI和kD分别为比例、积分和微分系数.
将输入变量E、EC和输出变量U(k)作为模糊语言变量时,将转速升高定为正值,降低为负值,其模糊子集为:
FE={NB,NM,NS,ZE,PS,PN,PB}
FEC={NB,NM,NS,ZE,PS,PN,PB}
FU(k)={NB,NM,NS,ZE,PS,PN,PB}
输入系统设计的输入变量误差和转速差的变化率以及输出变量控制器的输出值3个变量的模糊等级均可分为:负大(NB)、负中(NM)、负小(NS)、零(ZE)、正小(PS)、正中(PN)、正大(PB),每个变量的基本论域都按照15个等级进行划分,并将离散论域表示为:
E={-7,-6,-5,-4,-3,
-2,-1,0,1,2,3,4,5,6,7},
其
EC={-7,-6,-5,-4,-3,
-2,-1,0,1,2,3,4,5,6,7}
全部根据系统要求,遵照本文设计的模糊控制规则得到相关参数协调关系Gec=(1.5~2.5)Ge,输入变量误差E相应的量化因子为kE=0.2,转速差的变化率EC量化因子kEC=0.2,变量控制器的输出值量化因子kU(k)=2.
为了能够准确获取在实际工作中平地机所产生的转差率,依据实际调控的PID参数取值状态,建立两个域之间的模糊映射关系F,表示如下:
E×EC→kP×kI×kD
其中:E,EC,kP,kI,kD表示模糊子集.映射关系F反映的是一种参数调整规则,即:
IF
E=AIANDEC=BI
THEN
kP=CkANDkI=D1ANDkD=Fq
用模糊关系矩阵表示为:
F=Vl[AI×Bj×(Ck∪Dj∪Fq)]=
Vl[(AI×Bj×Ck)∪
Vl[(AI×Bj×Dj)∪AI×Bj×Fq)]
式中:l为语言规则的数目;∪为两分块矩阵并列.
2.4 模糊控制输出量的精确化
本文采用广大研究者使用频率较高的面积中心法实现从推理所得的模糊量到精确量的非模糊化处理[13],计算式子如下:
(1)
经由模糊规则得到模糊关系矩阵R,由模糊决策将kP,kI,kD采用VR模糊变量表示,则可得到:
VF=[E(k)×EC(k)]•F.
(2)
通过最大隶属度法,得到如下kP、kI和kD的表达式:
kP=[E(k)×EC(k)]•F•GP,
kI=[E(k)×EC(k)]•F•GI,
kD=[E(k)×EC(k)]•F•GD.
以发动机的转速误差E以及转速误差的变化率EC作为给定输入量,采用PID模糊合成运算求得模糊输出量U*,并采用下式将其转化为精确量,从而方便计算机的控制.
(3)
式中:ui为U的论域元素;μui为相应于ui的隶属度.

(4)
根据得到的u*乘以比例因子GU即可以反映出实际控制电压值u,从而得到作业时准确地控制量完成对比例阀的控制.
3 仿真设计及测试
为了测试平地机参数自整定模糊PID控制的有效性和可靠性,采用Matlab的Simulink仿真环境,分别对不带PID控制、PID控制和参数自整点模糊PID控制三种控制方式进行仿真测试,所设计的仿真框图如图4所示.
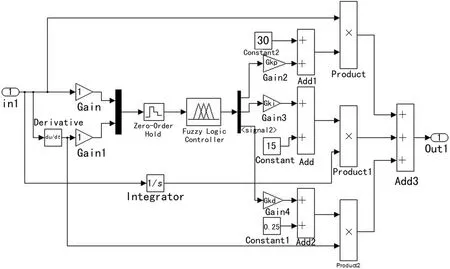
图4 带PID自整定的转速偏差控制的模糊控制器框图Fig. 4 The fuzzy controller block diagram with PID self-tuning speed deviation control
通过对平地机行走速度的采集,使用MatLab 软件对系统的响应进行绘图,采用单位阶跃输入信号对前进速度控制系统进行参数自整定模糊PID算法控制的仿真测试,得到如图5、图6和图7所示的仿真测试曲线.
由图5、图6和图7对比可见,通过仿真对比测试不带PID控制的方式下系统存在无法消除的静差,最主要达不到系统的控制需求;然而常规PID控制能够达到系统的控制需求,却存在较大超调量的缺点,同时需要的稳定时间也较长;本文设计的带参数自整点的模糊PID控制具有超调量比较小、控制稳定性好、所需要的调整时间比较短以及响应速度快等特点,而且发动机的转速误差控制在有效精度范围内,动态控制性能很好.
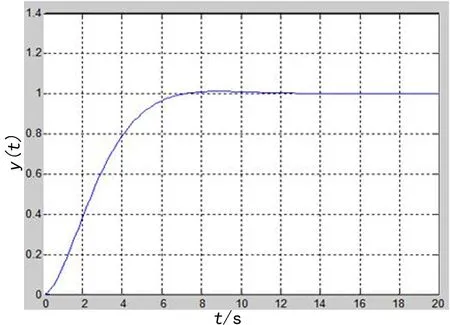
图5 不带PID控制的性能曲线Fig. 5 The performance curve without PID control
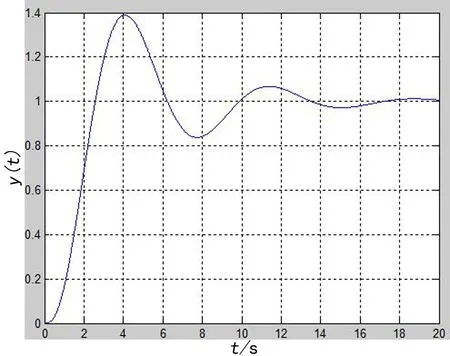
图6 PID控制的性能曲线Fig. 6 The performance curve of PID control
按照本文设定的参数自整点模糊控制规则,分别对kP取较大初始值,kI取很小初始值,kD初始值最小,并设定开始时偏差很大,得到如图8所示的kP、kI、kD整定过程曲线,充分体现了系统复杂工况以及状态多变的良好动态适应性.
图7 模糊PID控制的性能曲线Fig. 7 The performance curve of fuzzy PID control
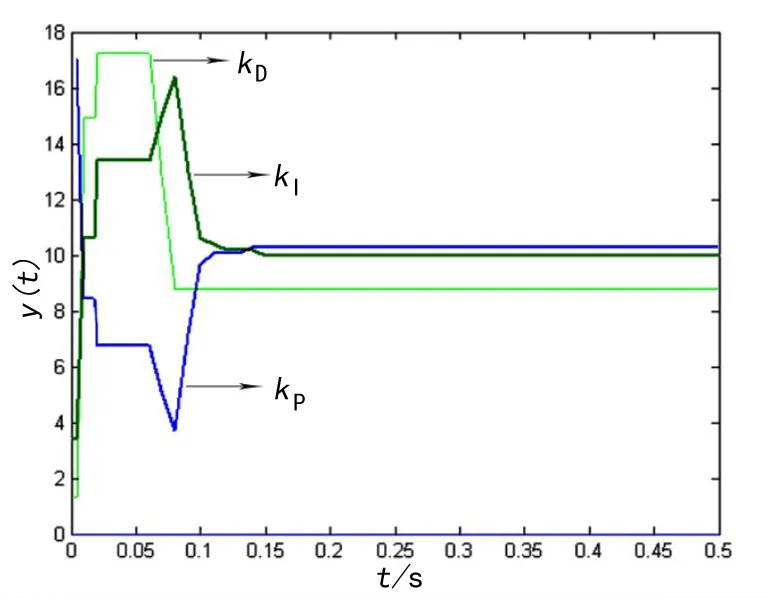
图8 模糊PID控制器调节参数的整定过程性能曲线Fig. 8 The performance curve of the tuning parameters of fuzzy PID controller
4 结论
本文以平地机作为研究对象,采用单片机作为速度执行器,提出了基于参数自整定模糊PID算法的平地机行走速度优化控制方案,同时为验证算法的可靠性和有效性,以喂入不同大小土块作为干扰信号,进行了参数的反复在线调整仿真测试,得出当初始值kP取较大值30,kI取15,kD取0.25时,可以尽快消除偏差,提高了响应速度,有效防止超调过大而产生振荡,使系统在线调整参数迅速达到稳定.
分别对不加PID的常规控制、PID控制和参数自整定模糊PID控制进行速度稳定控制的效果对比,由图可见不带PID控制方式存在无法消除的静差,且调节时间达到了8 s,无法满足系统控制要求;PID和模糊PID控制都能够满足系统控制要求,但PID控制存在较大超调,且稳定时间需要14 s,而同等条件下模糊PID控制,几乎没有产生超调量,动态响应时间很短且控制稳定性好,极大提高了系统调节动态响应速度,具有很好的动态控制性能,有效保证平地机行走速度优化控制.
