大功率平台电站断电保护策略研究
2018-08-08毛亚洲俞孟蕻
毛亚洲,俞孟蕻
(江苏科技大学江苏镇江212000)
在现代海洋船舶中,绝大部分船只采用全电力推进,船上其他生产运输工具也采用电力驱动。如果船舶断电,船舶不仅会失去推进动力和方向,而且船舶上的泊位系统、起重机、装载臂、雷达也将会遭受损害。因此,船舶断电是一场严重的事故,必须积极预防。
本文以1 500米作业水深钻井船为研究对象。其工作原理类似于我们平时打井,区别在于海底钻井要考虑到海水的压力等因素。钻井船对某一区域进行勘测之后,需要先用隔水套管在外围将四周括起来,确保与海水隔开,随后在隔水套管内,将钻柱下入海底,同水龙头、绞盘、钻头等装置配合进行钻探。钻井完成后还要使用防喷器,在海平面隔水套管顶端进行封井,以防止井内压力过大造成原油泄漏。因此,钻井船上有顶驱、泥浆泵、绞盘、绞车等大功率钻井装置。这些钻井装置全部采用电力驱动,电力驱动在带来巨大方便的同时,也增加了钻井船的电站的装机功率和断电风险。
针对钻井船这种大功率平台电站,目前预防断电的办法有:基于可用功率的分级卸载、基于频率的减负载、基于事件式快速减负载、频率相位反馈减负载等。基于可用功率的分级卸载,主要缺点:当有许多负载需要用时卸去时,很难准确预测这些负载的行为;基于事件式快速减负载,存在的主要的问题是通讯延时;频率相位反馈减负载存在主要问题是假断电侦测较高。因此在这些方法的基础上,本文以1 500米作业水深钻井船为研究对象,分析电力系统组成、断电原因和断电动态过程,提出一种新的方法,实现断电保护。
1 1500米作业水深钻井船电力系统
1500米作业水深钻井船电力系统是一个海上移动的孤立电力系统,其结构和运行工况满足海洋 环境的要求,其电力系统基本结构如图1所示。
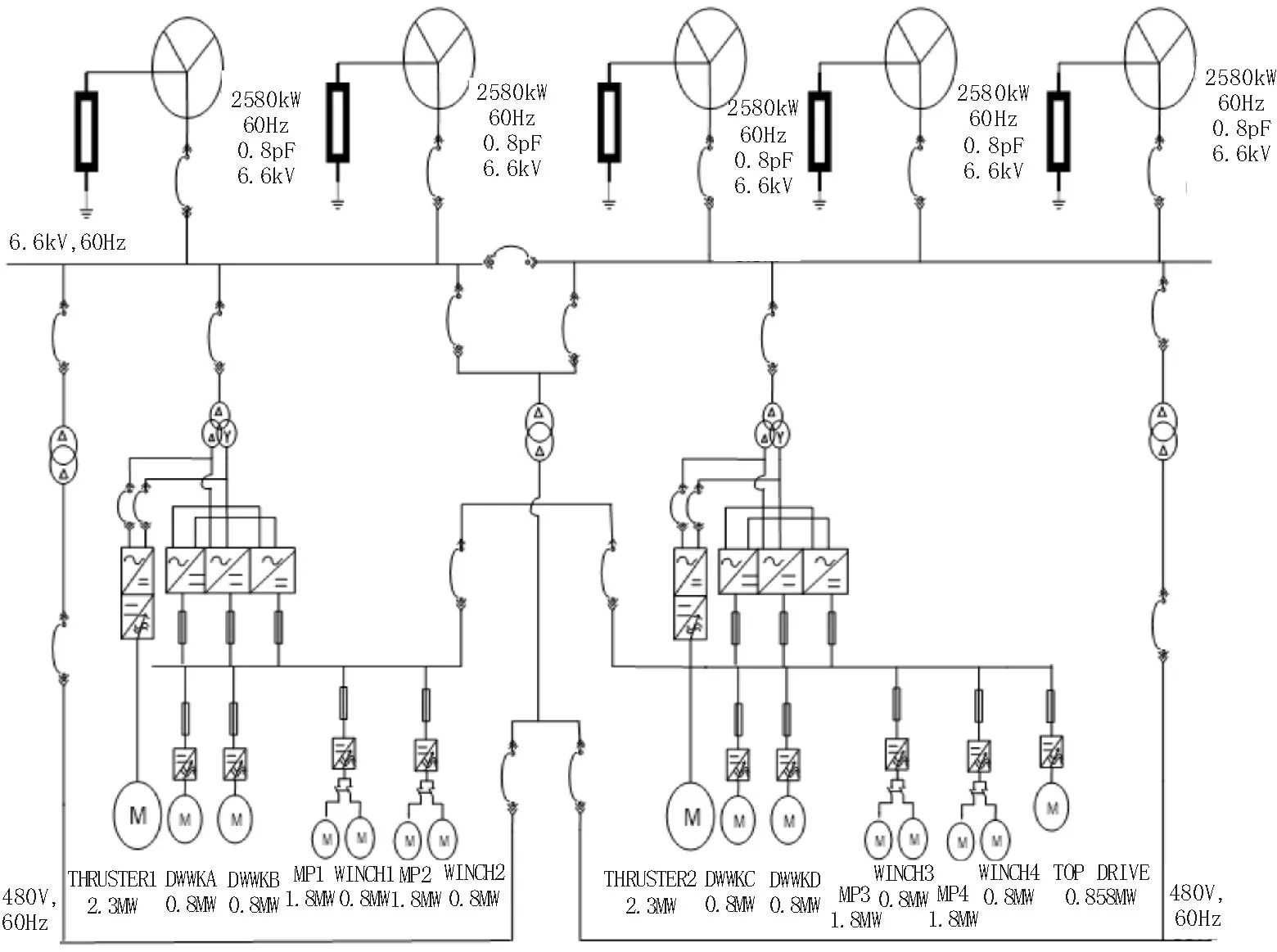
图1 1500米作业水深钻井船电力系统
从图1可以看出,1 500米作业水深钻井船采用单主站交流电力系统,并且具有ABS-R2冗余程度。其组成大致分为以下3部分:
1)发电单元。发电单元采用5台2 580 kW/6 600 V/60 Hz柴油发电机组,总发电量的额定值为12.9 MW。
2)配电单元。由于该钻井船装机功率较大,为降低负载电流和短路电流等级,保证船舶安全,主母线采用中压6 600 V供电。主母线分成两段,其中一段连接两台柴油发电机组,另外一段连接3台柴油发电机组。在推进模式下,两段主母线连接形成一段母线,为功率管理系统提供灵活的功率分配。在正常钻探模式下,两段主母线分开工作,单点故障发生时,不会影响另一条母线工作,增强系统稳定性。
3)电气负载。钻井船中压母线上的负载有两台额定功率为2.3 MW的推进器,4个额定功率为0.8 MW的绞盘,4台额定功率为0.8 MW的绞车;4台额定功率为1.8 MW的泥浆泵。钻井船低压母线上的负载种类很多,大致可以分成:生活电器、驾驶设备、照明设备、钻井辅助设备、通讯设备等。
2 断电原因分析
像钻井船这种大功率平台电站的断电原因有很多,大致可以分成以下两种状况:
当钻井船两段母线合并成一段主母线时(即图1中中压母联开关闭合),钻井船断电原因如下:
1)5台发电机中有一台发电机过电压或励磁故障,其它在运行的发电机因过压保护而跳闸。
2)钻井船上如有一台发电机超速,其余多台发电机跳闸。
3)负载分配严重失衡导致一台发电机过电流,其余发电机因频率和电压过低而跳闸。
4)钻井负载产生大量逆功率或过频,多台发电机因逆功率保护而跳闸。
当两段主母线断开工作时(即图1中中压母联开关断开),以下几种情况可能造成船舶断电:
1)当电力推进和其他钻井负载连接到现有母线上时,电站过载。
2)两个主母线连接开关闭合时,发电机不同步,发电机因过流而跳闸。
3)一个特定的辅助系统配置错误导致船舶停电。
4)从一段母线自动切换到另外一段母线时,断电故障会转移到新母线导致船舶停电。
3 基于观测器的快速减负载系统设计
现有的断电预防策略—频率相位反馈系统,其主要优点是没有数据传输和计算的延迟,每个推进器的PLC检测电网中的频率,一旦发现频率下降,立即采取保护措施。但任何情况引起的频率下降(f<fFLR)都会触发快速减负载系统工作。如果频率下降的原因不是由发电机故障引起的,快速减负载系统的触发就是假断电侦测。假断电侦测,会增加推进电机的磨损率,假断电侦测次数越多,推进电机的磨损率越高。因此,本文设计了一种基于观测器的快速减负载系统。
3.1 发电机组的控制模型
发电机组的平均加速度运动方程如式(1)、(2)所示:

在式(1)、(2)中:ωg是发电机组的平均转子角速度;ω0g是额定速度;Qmg是机械转矩;Qeg是电磁转矩;Qdg是阻尼转矩(Qmg、Qeg、Qdg都是标幺值);是系统惯性时间常数;是经摩擦和阻尼后的机械转矩。
3.2 断电侦测的主要思想
文中采用了一个新的算法来实现船舶的断电预防。该算法检测电网中发电机主开关状态,一旦检测到发电机主开关处于断开状态,立刻触发快速减负载系统,卸去发电机上多余负载,避免电网进一步断电。
对发电机主开关状态快速侦测,是通过比较电网中电磁转矩和机械转矩来实现的。尽管总的机械转矩无法直接测量,但是可以通过状态观测器进行估测。由于机械转矩与电网的平均加速度ω成比例,因此,该算法的断电侦测的速度可以显著地提高。
断电预测算法将转矩波动与预先设定的门限值比较,如式(3)所示。

当转矩波动大于门限值时,表明船舶电网中有一台发电机从电网解列,此时发出减负载信号,快速减负载系统(FLR)启动,电网中的负载减少,从而保证电网的安全稳定。
该算法的主要特征有:
2)当发电机主开关断开,机械转矩下降,转矩波动是正的,即如果电磁转矩Qeg突然增大,转矩波动也会是正的,如果柴油机控制器的负载增加率设置准确,这种情况是不可能发生的。
3.3 观测器估测机械转矩
3.3.1 可行性分析
从式(1)、式(2)发电机组控制模型可以看出系统是线性的,可以写成状态方程形式,如式(4)所示:

由式(5)得到系统能观。因此能够设计一个状态观测器,估测电网中正在运行的发电机的机械转矩。
3.3.2 龙伯格观测器设计
机械转矩是通过观测器估计的,它与电网的频率ωg和电磁转矩Qeg有关。龙伯格观测器通过对误差的反馈来消除状态误差和输出误差,其状态模型如式(6)所示。

根据龙伯格观测器的状态模型和发电机的控制模型,可估测电网中正在运行的发电机机械转矩,如式(7)所示:
在式(7)中,Qeg是系统电磁转矩,是经摩擦和阻尼后估计的机械转矩。L=(l1g,l2g)T是观测器增益,是偏差的加权。
3.3.3 滑模观测器设计
滑模观测器比龙伯格观测器具有更好的收敛性,因此滑模观测器对于输入端或测量端的突然变化能够做出快速的响应。滑模观测器状态模型如式(8)所示:
在式(8)中k1g和k2g是滑模观测器增益。
4 实验结果
以1 500米作业水深钻井船为研究对象,用MATLAB建立其电力系统模型,在此模型基础上研究系统断电保护。
图2表示在50秒时,突然有一台发电机发生故障,从电网脱离。在不采取任何保护措施时,电网中剩余发电机组的功率和频率状况如图2所示。
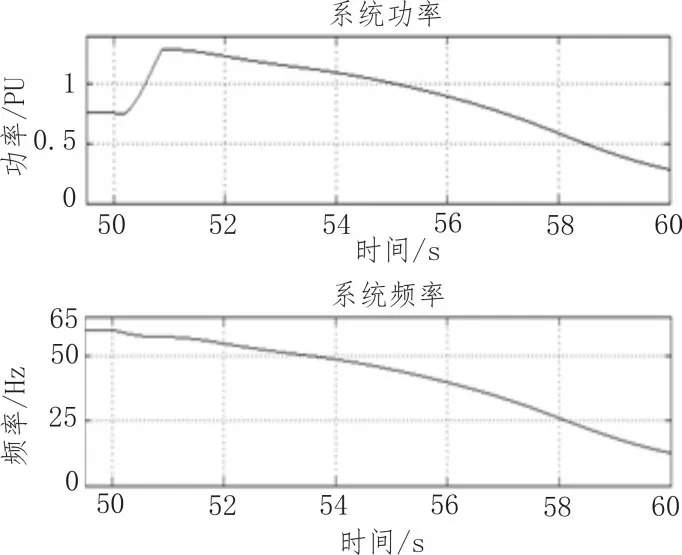
图2 未保护时系统功率和频率图
从图2中我们可以看出当有发电机发生故障时,如果不采取任何保护措施,整个电力系统将会崩溃。
图3表示在50秒时,突然有一台发电机发生故障,从电网脱离。采用基于频率相位反馈快速减负载系统时,电网中剩余发电机组的功率和频率状况。

图3 频率相位反馈系统的功率和频率图
图4表示在50秒时,有一台发电机发生故障,从电网解列。采用龙伯格观测器快速减负载系统时,电网中剩余发电机组的功率和频率状况如图4所示。
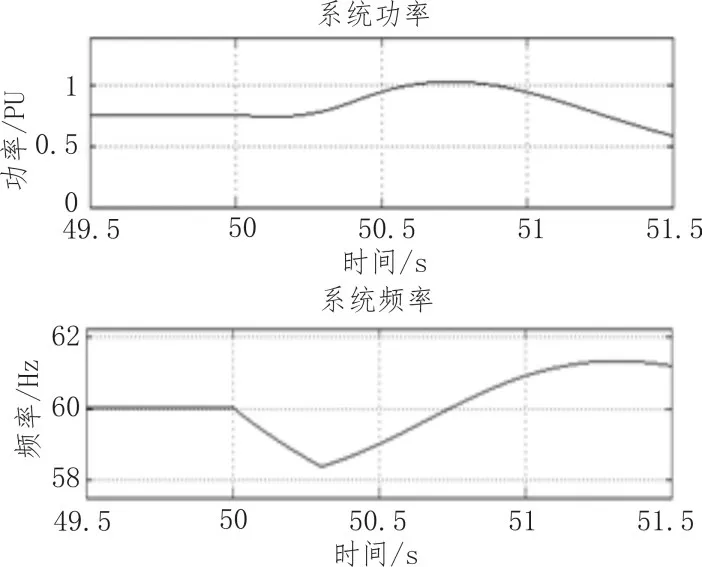
图4 基于龙伯格观测器的系统功率和频率图
图5表示在50秒时,有一台发电机发生故障,从电网脱离。采用滑膜状态观测器快速减负载系统时,电网中剩余发电机组的功率和频率状况如图5所示。
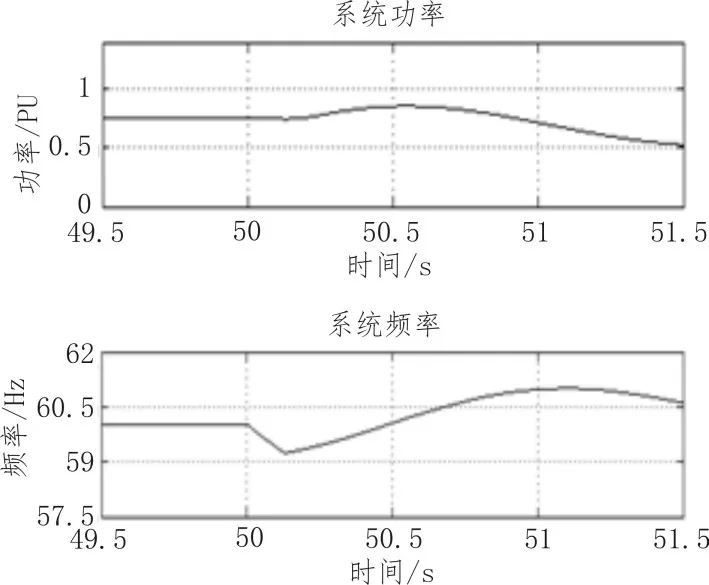
图5 基于滑膜观测器的系统功率和频率图
从图3、4、5可以看出当发电机发生故障时,系统采用快速减负载时,整个船舶能够实现断电保护。从图3中,我们可以发现基于频率相位快速反馈系统在系统频率下降到58 Hz(50.4 s)时,发出减负载信号。即当发电机发生故障后,大约400毫秒,发出减负载信号。
当采用观测器时来检测船舶断电信号时,门限值qFLR必须正确的设置,在这里我们取qFLR=0.2Qmg,这意味着转矩变化超过20%将会触发快速减负载系统卸去负载。从图4可以看出采用龙伯格观测器,大约300 ms过后,发出减负载信号;从图5可以看出采用滑模状态观测器,大约150 ms以后,发出减负载信号。
5 结论
将频率相位快速减负载系统和基于观测器的快速减负载系统进行比较,可以发现采用基于滑模观测器的快速减负载系统,能够将船舶断电的侦测速度提高2.5倍。
此外我们可以发现,采用滑模状态观测器的快速减负载系统,由于其具有快速的船舶断电侦测能力,相关的保护措施能够更早的执行,与频率相位快速减负载系统相比,系统的频率冲击缩小一倍。
