功率因数矫正器自动控制系统的设计
2018-08-08连玉杰侯慧张侨
连玉杰,侯慧,张侨
(武汉理工大学自动化学院,湖北武汉430070)
随着社会的发展与进步,电力电子设备越来越广泛的应用在我们的日常生活中。大多数负载在实际应用时均不呈现纯电阻性,因此在电源供电时会在输入端产生大量谐波并倒入电网产生严重的谐波“污染”,谐波电流会使线路中的正弦电压产生畸变电压,损害其他用电设备[1-2]。因此功率因数矫正(PFC)技术是电力电子设备要求的必需手段,也是未来电源电子领域发展的研究热点之一。
数字控制方式相比较于传统的模拟控制方式具有可编程性能够实现更为复杂的控制算法,操作系统更为方便快捷,在相同经费的前提下前者可以达到更准确的控制精度和稳定的工作性能。因此数字控制是现在PFC技术研究的主流方向之一。
文中提出了一种可预测占空比的控制方式,该算法控制和计算相对简单,通过正弦表格的方式离散保存并计算处理得到一个线电压周期内的所有占空比。省去了传统数字控制方式中电流环的设计,弥补了传统数字控制方式的不足。
1 可预测占空比算法介绍
假设Boost电路工作模式为连续电流工作模式;开关频率远远高于线电压频率,因此可认为一个开关周期内线电压可视为一个常量;同时忽略输出电压纹波的影响[3]。
基于上述假设,文献提出第n个开关周期占空比计算方法,本文提出的可预测控制算法占空比计算公式如下:

其中,
上式中ω为线电压频率,Vpid表示电压外环中PI调节器的输出,根据负载类型不同通过电压外环建模可以整定出不同的PI参数。基准电流与输入电压同相位,|sinω·tn|表示整流过频率为线电压频率的正弦波,当PFC变换器处于稳态时,d1部分的取值取决于参考电流值,参考电流决定于此时刻PI调节器的输出Vpid以及频率为线电压频率的正弦数组对应时刻的取值。当负载发生剧变时,例如负载从重载突变为轻载,输出电压骤升,此时PI调节器输出Vpid降低导致d1部分减小,调整占空比降低,开关关断,促使输出电压上升并重新平衡参考值,保证了输出电压随负载变化时动态响应性能。d2部分则直接反映了占空比随输入电压的变化情况,例如当输入电压骤降时,d2部分增大导致占空比增大,从而调节输出电压增加,保证了系统输出电压随输入电压变化的动态响应性能。综上所述,d1与d2两部分分别反映了输出电压随负载和输入电压变化时的动态响应性能,基准电流设置为线电压频率的正弦数组与PI调节器输出的乘积,理想条件下输入电流追随基准电流与输入线电压同相位,功率因数近乎为1,如图1所示。
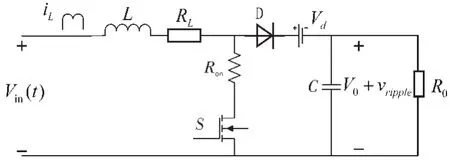
图1 boost电路精确模型
2 控制算法状态分析
在实际应用中会存在二极管压降,电感阻抗等外在因素,为了改善电感电流正弦化程度,本文根据更为精确的boost电路模型,如图1所示。式(5)表示精确模型下占空比计算公式:
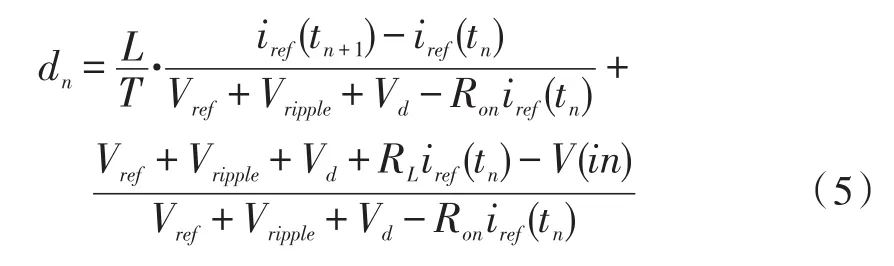
因此在一个开关周期内我们需要实时采样此时刻输出电容上的纹波以及输入电压上的谐波,如图2所示。

图2 可预测控制算法示意图
可预测占空比算法与传统大多数数字控制算法区别在于省去了电流环的设计方案,传统的控制方案通过采样某时刻输入端电流值,以及正弦表格和PI调节器的输出经过乘法器的计算得到周期结束时刻的电感电流,以此来得到正弦化电流下的此时刻下的占空比。因此在一个开关周期内只需要采样电压值,所以在数字控制器内省去了电流环的计算,简化了电路结构,开关周期内需要计算用到的数据数量大大减小,因此处理速度相对加快,解除了开关频率和采样频率之间的矛盾限制。本文提出的可预测占空比控制框图如图2所示,根据精确模型下的占空比计算公式,本文在已有技术的基础上增加了电压前馈补偿和电压纹波采样。为了实现更好的动态与稳态性能,提出了一种电压前端反馈控制策略。在每个线电压周期内,电网电压可能会出现失真或者波动导致输入电压不正弦化产生谐波,输入电压反馈主要就是针对电网电压产生高次谐波时,通过电压采样计算得出在电网失真情况下的补偿占空比。
PFC连续工作模式下,在电网电压过零点,输入电流会短暂的进入DCM模式,产生谐波电流。PFC在输入电压过零点时,电感电流上升率很小,输入电流短暂超前于输入电压,当输入电感数值选取不当时也会对电路输入电流产生影响[4-7]。因此在本控制系统中加入电流谐波抑制系统,通过采样整流前端输入电压,加入零阶保持器检测输入电压过零点时刻,选取合适步长修正弦数组参考电流初始相位,通过修正相位后的正弦表数据得到补偿后的参考电流。
3 电压外环建模分析
为了便于分析PFC变换器输入输出之间的关系,针对电压外环进行建模。PFC控制系统输出电压为二倍线电压频率纹波,为了滤除其分量,对PFC变换器进行一次周期平均运算,即交流线电压整流后的一个周期,根据输入输出功率平衡关系[8]:

式(6)中vin与iin分别表示输入电压与电流的有效值,vo与io分别表示输出电压与电流。当PFC系统进入稳态时,可以假设iin≈iref,将in带入功率平衡公式可得:

式(7)中K为输入电压峰值,vpid为PI调节器的输出值,运算结果表明电路关系仍呈非线性,针对电路中稳定工作点引入小信号扰动变量代入功率平衡公式,化简等式以及消除直流分量与二阶微分项可得:

输入端口改写电流表达式并消除二阶微分项可得:

为了分析方便,仿真环节负载选取电阻性负载,可方便求出s域内PI调节器输出至PFC系统输出的传递函数:

以及PFC控制系统输入至输出的传递函数:

根据G1(s)设置滞后补偿环节,输出电压为二倍线电压频率的纹波,为了减小纹波对电压外环的影响,电压外环的增益需要远小于二倍的线电压频率。因此可以设置补偿环节转折频率为二分之一线电压频率,那么系统环路将得到近似于45°的相位裕度,十分稳定[9-12]。
4 仿真结果与分析
本文使用Matlab/Simuink进行仿真分析,仿真所采用的输入为有效值220 V的正弦电压,不需要考虑电网谐波等带来的影响,根据算法框架构建仿真[13-15]。表1给出了PFC变换器仿真参数设置。如表1所示。
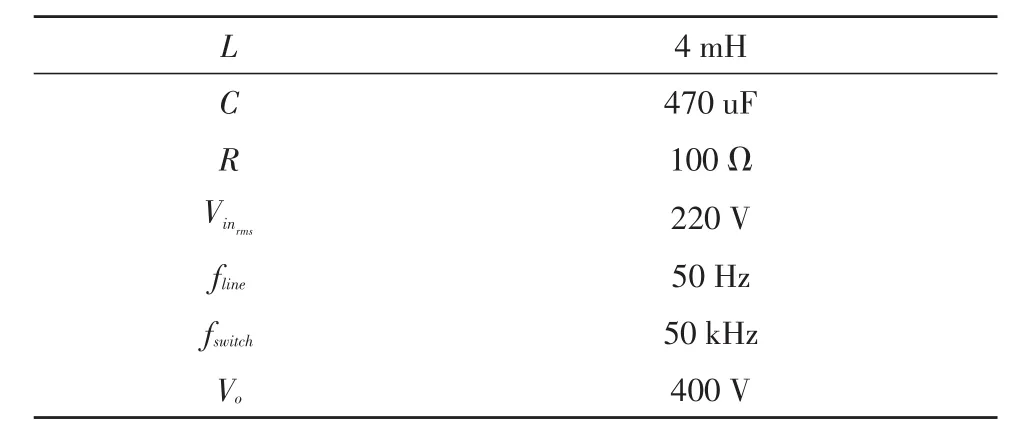
表1 PFC变换器参数设置
算法控制结构按照图2进行搭建,仿真所采用控制算法仿真图搭建如图3所示。
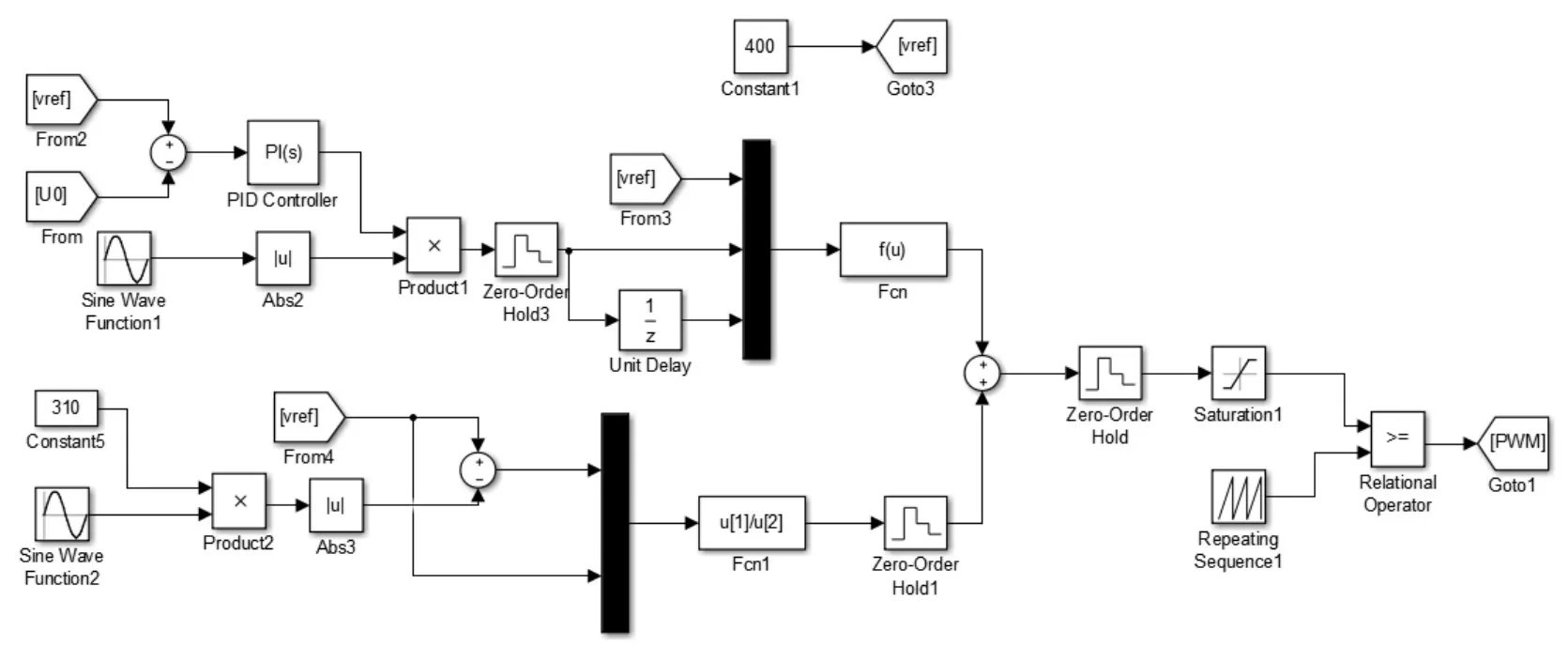
图3 PFC占空比计算模块
PFC变换器Boost电路仿真模型如图4所示。
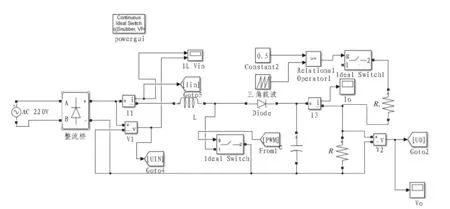
图4 Boost电路仿真模型
正弦数组频率选取线电压频率,占空比分为两部分分别进行计算,通过设置延迟环节来实现一个周期前后基准电流的差值计算[16]。图4表示系统进入稳态整流后的系统输入电压与输入电流波形,可以看出输入电流正弦化程度很好,与输入电压相位差很小,此时功率因数可达到0.998。如图5所示。
新算法能够在短时间内迅速的进入稳态,并能够得到理想的功率因数和输入电流波形。图6给出了负载在1 s时骤降至800 W时的输出电压波形图。系统大约在变载后0.2 s左右重新进入稳态,过渡过程平滑过渡震动幅度很小实现平滑过渡,如图6所示。
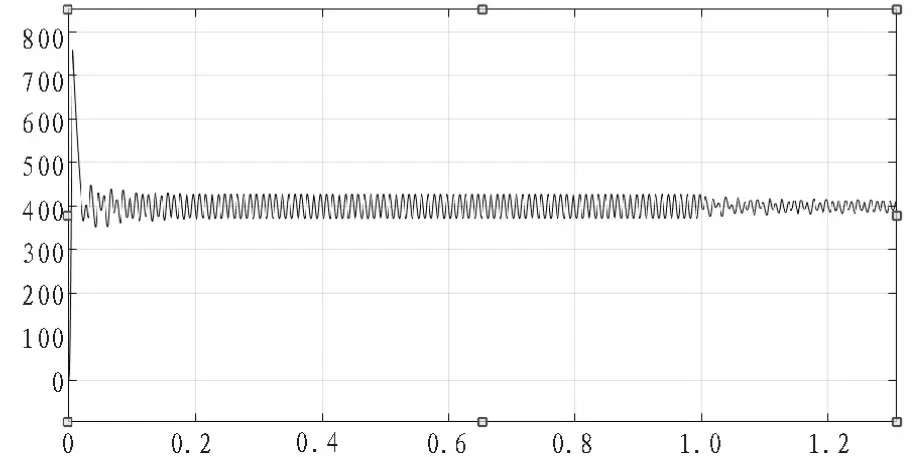
图6 负载骤变输出电压波形图
图7所示为功率因数波形图,图中可以得出系统大约在0.04 s功率因数稳定在0.995以上,可以证明本文提出的控制算法可以很快并且稳定的得到非常高的功率因数,如图7所示。
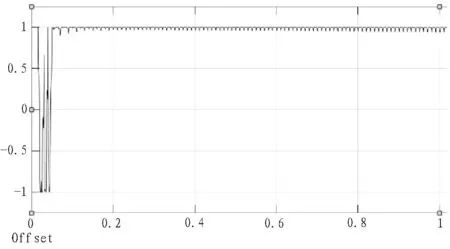
图7 可预测控制算法PF波形图
仿真模型将可预测占空比算法应用于Boost电路中,仿真结果验证了本文中提出的可预测占空比算法与系统分析的准确性,输入电感电流谐波失真较小,通过电压外环的控制跟随基准电流,得到了随正弦电压变化的高正弦化的电流输入波形,输出电压实时准确跟随参考电压,实现单位功率因数整流。外部负载突变后可以迅速进入新的稳态,实现单位功率因数整流,因为正弦表数据随输入电压变化较为敏感,因此减小动态响应时间,改善系统工作性能,这部分仍需要进一步的改进。
5 结论
文中基于可预测占空比控制方法进行分析和理论推导,省去了传统数字控制中电流内环的设计,通过直接设置开关周期开始与结束时刻电流为基准电流,预先设置正弦表数据,直接通过基准电流来计算占空比,替代了电感电流采样模块与传统控制方案中的PID电流补偿环节[17],避免了常规控制算法中在每个周期内冗杂的占空比运算,减小了控制系统在每个周期内的工作量,得到了更高的开关频率与工作效率。仿真结果表明可预测占空比算法的可行性,具有很好的动态与静态性能,不足之处在于负载较轻在输入电压过零点时容易进入DCM工作模式,这也是现阶段PFC工作研究的热点之一。
