AD2S1210在气象雷达中的应用
2018-08-08刘仁贵李伟华党建林马胜毅侯成英
刘仁贵 ,李伟华 ,党建林 ,马胜毅 ,侯成英
(1.西北工业大学明德学院陕西西安710124;2.陕西捷普控制技术有限公司陕西西安712000;3.西安晨曦航空科技股份有限公司陕西西安710077)
气象雷达是用于探测天气的雷达,气象雷达在工作的过程中,有时需要对特定的空间区域进行反复扫描,实时跟踪特定云系的变化和走向,以提高预报的准确性。因此,在气象雷达运动控制系统中,需要对方位和俯仰的角度位置实时解码,并精确定点到某个特殊的角度,否则容易造成前后扫描云图的重合性变差。
旋转变压器(旋变)[1]的定子和转子是分开安装的,为非接触式结构,结构简单,坚固耐用,维护方便,对机械和电气噪音不敏感,抗干扰能力好,具有很高的可靠性,因此广泛应用于各种条件恶劣环境下的角度测量。
由于旋变的输入端是具有一定频率的交流励磁电压[2],输出端也是模拟量信号。在用旋变进行角度测量时,需要为其产生励磁信号并将旋变输出的模拟量变换成表示角度的数字信号的解码器。
本文阐述了一种新型单芯片旋变数字转换器AD2S1210的外围硬件电路设计以及软件设计,并对设计进行了验证,给出了试验结果。
1 硬件设计
1.1 气象雷达运动控制方案
为了减少经过滑环的电缆的数量,提高控制系统的可靠性,气象雷达的俯仰运动和方位[3]运动分别由两块独立的控制板卡完成,两块控制板卡通过两个独立的RS232通信端口接收主控计算机发出的定速或定点控制指令。定速则是方位运动或者俯仰运动按照主控计算机指定的速度匀速转动,定点运动则是方位运动或者俯仰运动转动到指定的角度位置并停止转动。气象雷达的控制方案如图1所示。

图1 气象雷达控制方案
1.2 AD2S1210概述
AD2S1210[4]是ADI公司推出的完整的单芯片旋变数字转换器(R/DC),在分辨率为10位且时钟为8.192 MHz的情况下,最大跟踪速率可达2 500 rps。AD2S1210的最大分辨可达16位,可由用户设定,最大精度可达0.005°。可通过并行或者串行SPI接口对其进行配置以及读取绝对位置、实时速度以及故障代码数据。
AD2S1210的外围电路主要是旋变励磁信号驱动电路和旋变输出的SIN/COS信号接收电路[5],AD2S1210与外围电路的硬件接线关系如图2所示。
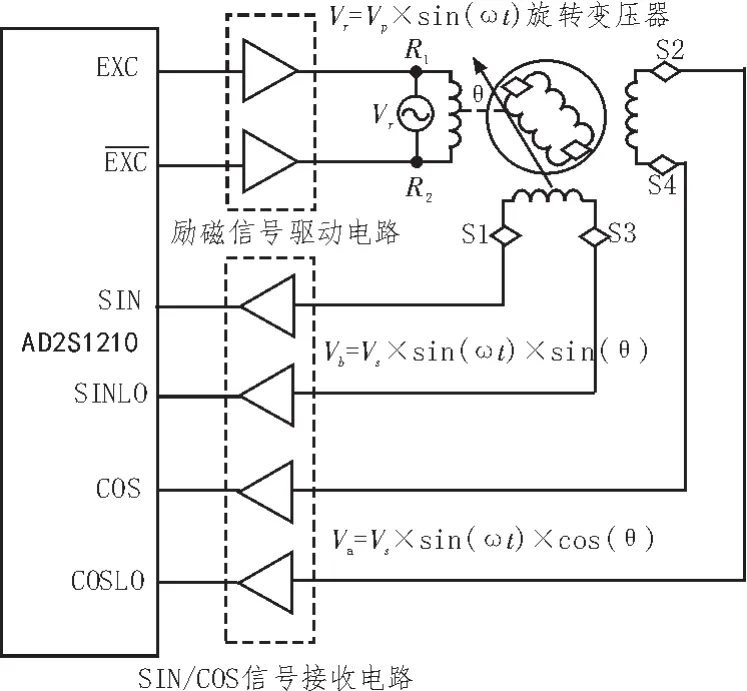
图2 AD2S1210的硬件接线图
1.3 AD2S1210励磁信号电路
由于旋变与AD2S1210的距离较远,且旋变的阻抗一般都不大,从几十欧姆到几百欧姆,例如160XZ01-1B型旋变的直流阻抗为200Ω左右,而AD2S1210输出的差分励磁信号EXC/------EXC幅度仅为3.6Vp-p,抗干扰能力和驱动能力弱,因此,为了提高励磁信号的抗干扰能力和驱动能力,需要对励磁信号进行电压和电流的放大[6],为旋变提供足够的驱动电流。另外,AD2S1210输出的励磁信号EXC/------EXC来自其内部D/AC,由于D/AC过程会产生一定的量化噪声,因此,励磁驱动电路中还应增加滤波电路,以减少驱动信号中的噪声[7]。AD2S1210励磁信号电路如图3所示。
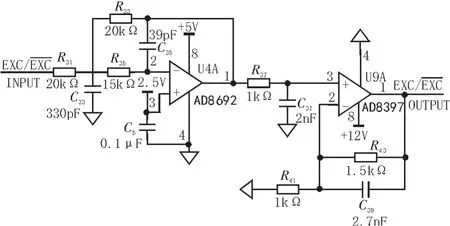
图3 励磁信号电路
图3中,励磁信号经过以双通道运算放大器AD8692[8]为核心的三阶巴特沃兹低通滤波器[9]以及AD8397构成的高电流驱动后,与旋变的励磁端连接。
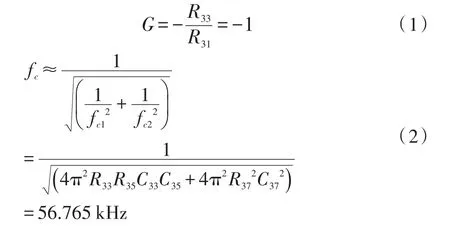
三阶巴特沃兹低通滤波器由前、后两级组成,前级由R31、R33、R35、C33、C35、U4A构成多反馈有源低通滤波器,后级由R37、C37组成一阶无源RC滤波器。三阶巴特沃兹低通滤波器的直流增益和-3 dB的截止频率分别如式(1)和式(2)。
滤波前与滤波后的励磁信号如图4所示。图4中,上面的波形为滤波前的波形,下面的波形为滤波后的波形。
从图4可以看出,滤波器电路的引入,有效减少了励磁信号中的噪声,但由于滤波电路中电容的存在,引起了信号的相移[10],其相移为-5°左右。
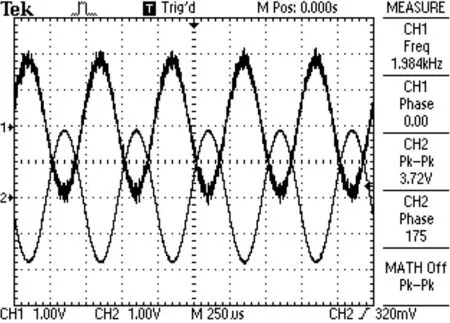
图4 滤波效果
高电流驱动电路以AD8397为核心,其最大输出电流高达310 mA,高电流驱动电路的单端增益为1+R43/R41=2.5,差分信号增益为5。因此,高电流驱动电路不仅为旋变提供了足够的驱动电流,同时还将励磁信号放大到适当的值,以提高励磁信号的抗干扰能力。在12 V供电的情况下,AD8397输出的励磁信号幅度为3.6Vp-p×5=18Vp-p。
1.4 AD2S1210信号接收电路
由于旋变输出的SIN/COS信号要经过较长线路传输,传输过程中容易受到噪声干扰,且信号的幅度不满足AD2S1210信号输入的要求,因此,AD2S1210信号接收电路的主要作用是消除传输线路上产生的干扰信号,并将SIN/COS信号调整到AD2S1210能接受的3.15 Vp-p±27%范围内。AD2S1210信号接收电路如图5所示。
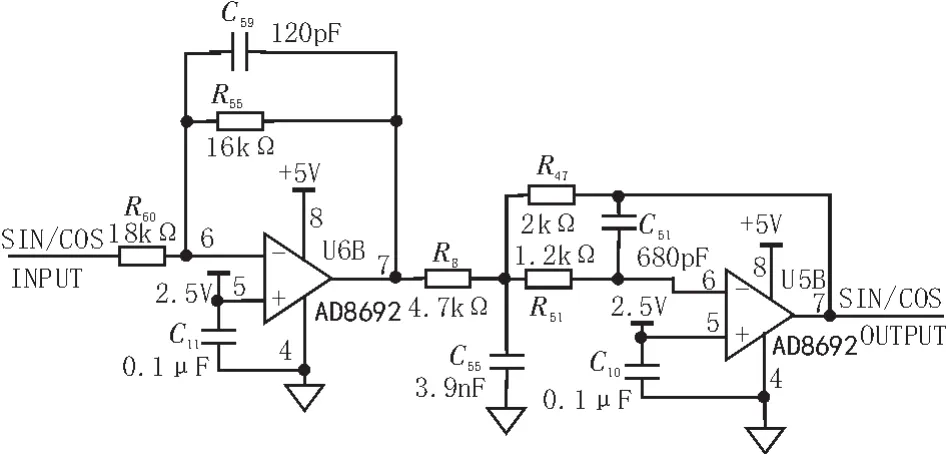
图5 AD2S1210信号接收电路
信号接收电路由两级组成,前级为一阶有源低通滤波器,增益为-R55/R60=-0.889,后级为多反馈有源低通滤波器,其增益为-R47/R8=-0.426。信号接收电路总的增益和-3 dB截止频率分别如式(3)、(4)。
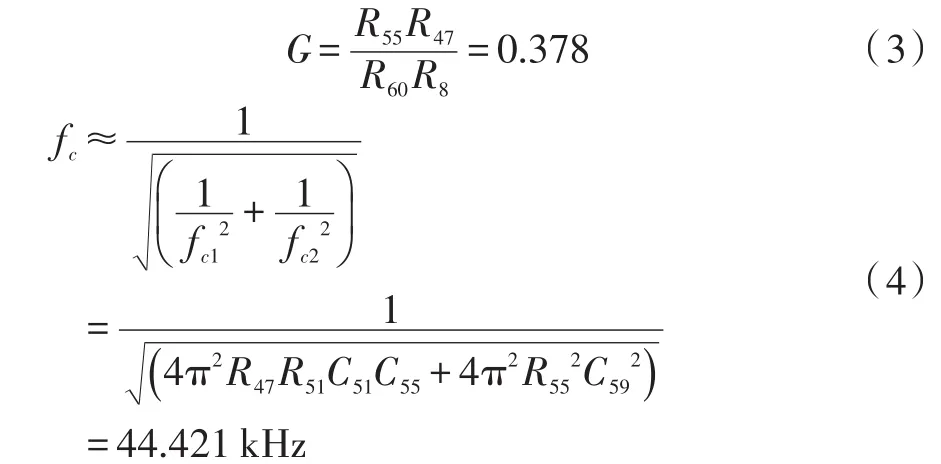
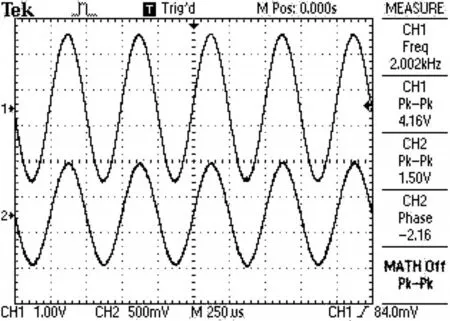
图6 接收电路输入、输出信号
由于气象雷达选用旋变的变比为0.45,因此旋变输出的差分SIN/COS信号幅度最大为8.1 Vp-p,AD2S1210输入信号的幅度为8.1 V×0.378=3.062 Vp-p,满足AD2S1210的输入电压要求。
图6为AD2S1210信号接收电路的输入信号(上)、输出信号(下)的对比图。
从图6可以看出,由于旋变自身良好的抗干特性以及系统中屏蔽传输线的使用,信号几乎不受外界干扰。滤波电路引起信号-2.16°的相移。
1.5 信号的相移

图7 相位差
从图7可以看出,由于旋变相移的存在,整个信号链路的总相移约为2.87°,大大低于±44°的最大允许值。
2 软件设计
2.1 软件流程
在气象雷达控制系统中,微处理器采用STM32F407VGT6,其主频高达 168 MHz,并带 DSP、FPU以及丰富的外设,使其非常适合气象雷达伺服电机的控制以及相关浮点数据的计算[12]。STM32F407VGT6通过SPI接口对AD2S1210进行设置和读取相关寄存器的数据。AD2S1210的软件操作流程如图8所示。
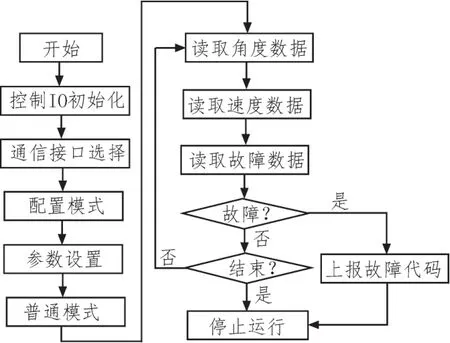
图8 软件流程
2.2 通信接口选择
AD2S1210与控制器之间既可以通过4线串行SPI接口进行通信[13],也可以通过16位并行接口通信,但SPI接口占用的硬件IO资源少,且时钟速率最高可达25 MHz,完全满足系统的要求,因此,气象雷达控制系统中,AD2S1210与控制器之间通过SPI接口进行通信。通信接口的选择,由信号的电平决定,当为高电平时,并行接口使能;当引脚处于低电平时,串行接口使能。
2.3 工作模式选择
AD2S1210有配置模式和普通模式两种工作模式[14]。配置模式用于对相关参数进行设置,如励磁频率、分辨率和故障检测阈值等。配置模式也可用于读取故障寄存器中的信息。位置和速度寄存器中的数据也可以在配置模式下进行读取。AD2S1210可以完全工作在配置模式下,也可以在配置完成后,工作在普通模式下。在普通模式下,可以读取位置和速度数据。A0和A1引脚的电平用来确定工作模式,以及普通模式下输出的是位置还是速度数据[15],具体如表1所示。
2.4 参数设置
在实际应用中,AD2S1210的设置主要是励磁频率的设置和分辨率的设置。
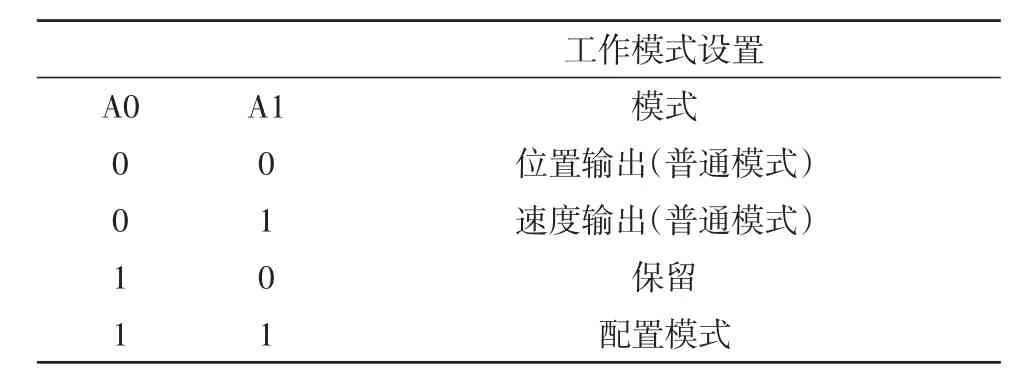
表1 工作模式设置
AD2S1210的励磁频率范围是从2 kHz到20 kHz,以250 Hz为增量。励磁频率的设置主要是修改寄存器0x91的值FCW,励磁频率的计算如式(5)。

式(5)中,fCLKIN为AD2S120的晶振频率。在本控制系统中,AD2S1210的励磁频率采用2 kHz,频率低可以减小信号的相移。
AD2S1210最大跟踪速度与分辨率有关,分辨率越高,其最大跟踪速度越低。气象雷达在转动的过程中,方位最大转速仅为36°/秒,但定点精度要求最大误差不大于0.1°,因此在气象雷达控制系统中,AD2S1210的分辨率设置为16位。在普通模式下,分辨率由RES0和RES1输入引脚电平决定,在配置模式下,分辨率由设置控制寄存器0x92中的D0和D1位,即RES0和RES1位决定。具体设置如表2所示。
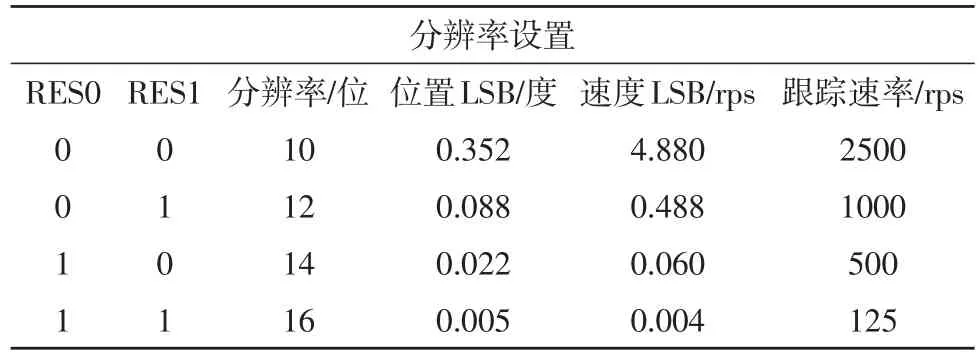
表2 分辨率设置
2.5 数据读取
AD2S1210位置[16]数据高、低字节分别存储于0x80和0x81寄存器中,速度数据高、低字节分别存储于0x82和0x83寄存器中。在气象雷达控制系统中,AD2S1210的分辨率采用16位,因此,可以将位置数据的两个字节组合成一个无符号的短整型数据,并乘以0.005493(360/65536)即可得到角度位置。将速度数据的两个字节组合成一个有符号的短整型数据,并乘以0.003815(125/32768)即可得到实时速度,实时速度为正值,表示旋转方向为顺时针方向,为负值,则表示旋转方向为逆时针方向。
2.6 故障处理
AD2S1210的故障寄存器0xFF是一个8位的寄存器,每一位的值代表一种故障是否发生,如表3所示。
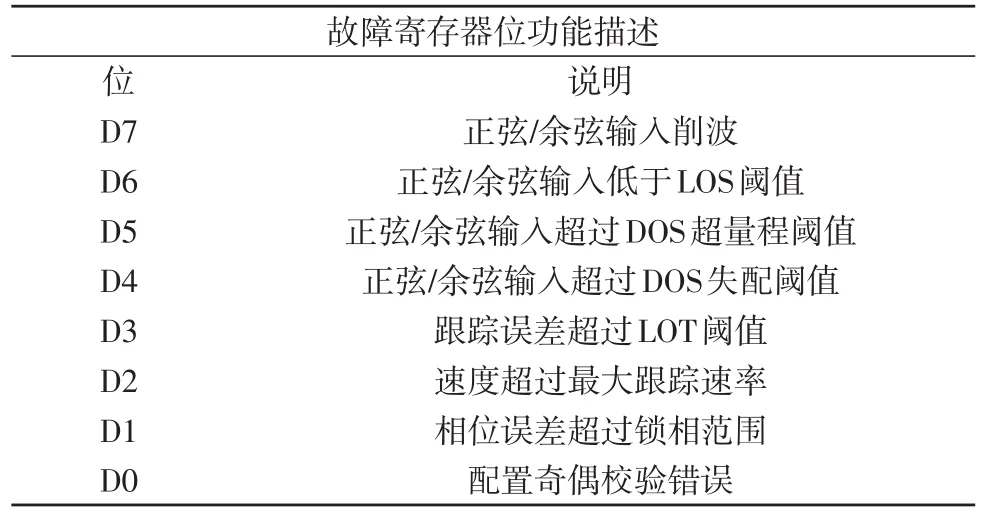
表3 故障寄存器位功能描述
AD2S1210能够自动检测输入信号故障,当没有故障发生时,寄存器的值为0,当发生故障时,对应的位为1,且读取到的位置和速度数据也为无效数据,因此通过读取故障寄存器的值可以判定当前读取的数据是否有效,以及故障发生的原因,方便故障的排除。该功能在气象雷达控制系统中非常有用,为系统的平稳运行提供了有力的保证,因为错误的数据将可能导致定点控制算法失效,造成雷达剧烈震动,对系统结构造成损坏。在气象雷达控制系统中,当检测到有故障发生时,微处理器将上报主控计算机,并立即停止转动,确保系统安全。
3 实际效果
基于AD2S1210的旋变信号采集板如图9所示。
图9 信号采集板实物图
定点控制测试结果如图10所示。
从图10可以看出,方位定点180°时,实际定点为 180.02°,误差为 0.02°;俯仰定点 45°时,实际定点为45.00°,误差为0.00°。
4 结论

图10 定点控制测试
本文着重介绍了AD2S1210的外围硬件电路设计以及AD2S1210的软件操作,并制作实际电路对设计经行了验证,从实验的结果来看,俯仰控制误差不大于0.01°,方位控制误差不大于0.02°,且AD2S1210的读数非常准确、稳定,为系统的高精度定点控制和长期的稳定运行提供了重要的保证。从实际装机运行的结果来看,定点迅速、精确,系统运行非常稳定,最终雷达扫描空间区域得到的云图效果也非常好。
