太阳能板的自动清扫装置的研究
2018-08-07许昌电气职业学院李莲英张坤平
许昌电气职业学院 李莲英 张坤平
一、背景和意义
煤炭、石油、天然气传统的不可再生能源逐渐减少,无法满足经济发展需求,能源危机问题日渐突出。各个国家不得不竭尽全力去寻找其他的新型能源用来应对其所面临的能源问题,能否找到新的能源,处理好能源问题关系到经济社会能否健康稳定发展。
大家都熟知的是太阳能发电站的电池板工作是需要长时间暴露在室外环境中,随着暴漏在室外环境中时间的增长,会有许多的灰尘和污垢落在光伏组件的表面,这其中的主要成分是无机及有机物污染物,出现这一现象后,太阳能电池板对光线的吸收作用被大大降低,使得发电量会降低,并且因为“热岛效应”造成局部发热而损坏。因此可见,因为表面灰尘和污垢会引起的发电效率的降低,严重时会导致安全事故。人们不得不考虑如何降低这种影响。目前的形势下,光伏产业的发展十分迅速,基于对以上因素的考虑,人们开始从各个角度对光伏组件表面的积灰效应进行了试验研究。结果显示太阳能板的发电效率与积灰量呈负相关变化,当积灰量达到5.65g/m2时,其输出功率损失达可以到15.2%。消除这种影响所带来的经济效益要比在提高光伏材料的转换效率上更加可观。依据数据统计,太阳能电池板如果超过3个月没有进行表面清洁,那么将会有5%左右发电效率的损失,尤其是在较为恶劣的天气环境下,如果超过20天没有对其进行清洗,其发电效率大约会损失超过12%。基于以上这些学者测试和实验结果表明,太阳能电池板表面的灰尘已经对发电效率产生较为严重的影响。
面对此问题,如何对太阳能电池板进行有效的清洗已成为摆在光伏产业面前急需解决的问题。传统的清洁维护工作以人工擦拭和清水冲洗为主,但是多数太阳能电站建设在沙漠或戈壁,自然条件本身就十分恶劣,水资源缺乏,使得这种清洁方式难度大,成本高。基于此,设计开发一种能够有效清扫太阳能板表面灰尘的自动化装置变得十分必要。
二、国内外研究现状及发展趋势
1.光伏组件清洁机器人及自动清扫装置研究现状
目前具有代表性的有以下几种:
日本的未来机械公司于2013推出的出免水清扫机器人,如图1-1所示。设备自带蓄电池,无需用水,适合在干旱缺水地区使用和推广。

图1-1 免水太阳能面板清扫机器人
2013年日本Sinfonia Technology公司推出自动行走式机器人,如图1-2所示。配备蓄电池,可以一边移动,一边向外洒水,利用旋转刷和刮板进行清扫,清扫能力为每小时100m2。
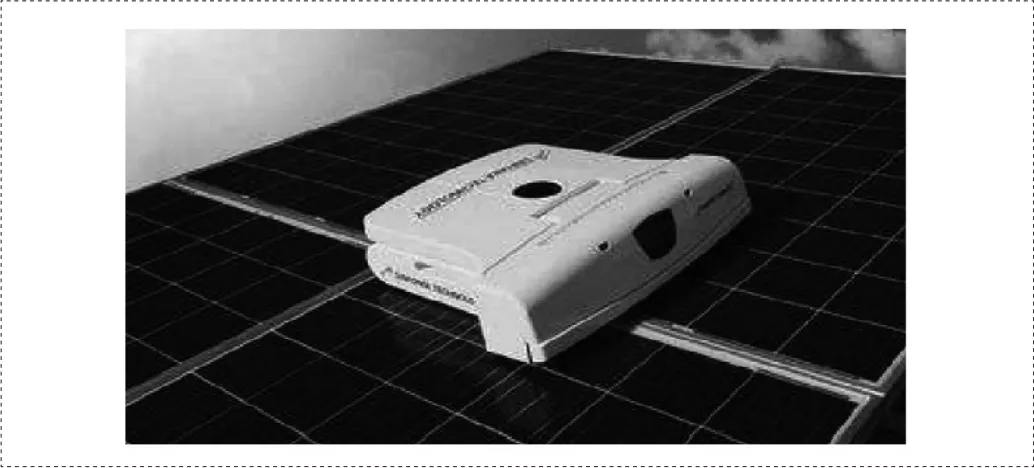
图1-2 自动行走式清扫机器人
2015国际消费电子展(CES)上,科沃斯推出了清洁机器人锐宝,其可以实现自主行走、路径规划,进行自动升降式清扫。
2.发展趋势
以上提到的各种方法中,效率最低的是人工清洗,而且消耗的水量很大;利用纳米材料和静电技术的成本很高;种类繁多的小型机器人一方面因为成本原因,一方面是他们对环境要求高。目前来看,轨道式装置具备比较明显的优点。是目前首选的发展方向。同时,需要考虑装置所应具有的特点和优势:安全性、响应速度、低成本,节约水,操作简单。
三、太阳能光伏板自动清扫创新点
通过查阅资料、文献、专利等对现有的太阳能板的清扫方式及清扫装置的研究情况有一个较为全面的了解,在此基础之上,针对对光伏电站太阳能电池板清扫系统的需求进行分析,并针三门峡鹏飞电子有限公司光伏电站的清扫情况的特点和存在的问题进行调研。结合现有技术,进行一定的改进,制作一款自动清扫装置。主要研究内容及过程如下:
1.查阅各类资料,分析光伏电站对太阳能电池组件清扫系统的需求与现状,现有情况以及使用的关键技术。
2.依据总体方案,细化设计要求,内容包括机械结构,可靠性和安全性。还有控制系统的要求,包括硬件和软件设计。
3.根据设计要求,完成机械部分的设计与样机的加工制作。包括图纸,控制板、软件设计。
4.系统调试与实验,搭建小型清扫装置,对样机进行调试,验证系统功能。5.针对出现的问题对方案和细节部分进行修改完善,总结整个课题工作开展过程中的问题。
四、清扫装置总体方案设计
1.系统整体设计
针对现场需求,考虑如下设计要求:
(1)无需用水。
(2)利用原有支架进行改造,保证机构的可靠性,便于维护更换。
(3)模块化的设计,将装置分为横向行走部分,纵向行走部分,清扫部分。
(4)选择合适的滚轮,保证运动过程不对组件表面造成破坏。
(5)安装相应的传感器,实现较为精确的自动控制。
2.清扫装置机械结构设计
针对上述要求,首先进行了机械部分的设计。主要结构如图2-1所示。行走部分所需的框架不需要另行设计,可以利用原有的太阳能阵列的边框,考虑到其承载能力和系统的功耗。选用材料时,考虑的主要因素是材质和强度。以质量轻和合适的强度为要求。除了行走框架之外,主要包含有行走装置、提升装置、清扫部分。其组装方式和工作原理为,将行走装置通过滚轮卡在原有的矩形框架上,通过电机的带动可以实现横向的移动,提升装置安放在行走装置上,可以实现上下运动功能,清扫部分位于提升装置下端的小车上,通过电机带动滚筒对太阳能电池板的表面进行清扫。通过这种组合方式可以实现滚筒运动对光伏板表面的全覆盖运动,以实现清扫目的。
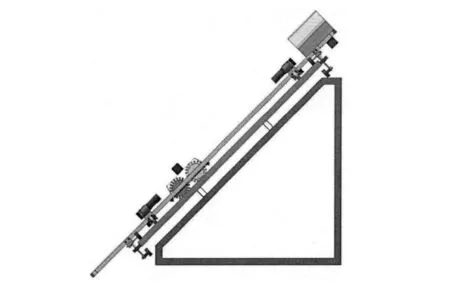
图2-1 装置结构图
(1)行走装置
该部分的主要功能是能够带动行走装置包括位于其上的提升装置和清扫装置可以沿着原有框架做横向运动。包括主动轮、从动轮、传动带和驱动电机等。主要运动过程为,在不进行清扫的时候,在整个光伏板框架的一边为其提供一个静止位置,当执行自动清扫功能是,行走装置先检测个位置信号是否到位,接着沿光伏组件的框架横向移动一段距离,该距离和装置上的清扫小车一次可以清扫的宽度相同,这样能够保证在横向移动过程中能够对光伏组件实现全部覆盖。当清扫装置清扫完这一个幅面的组件后,行走装置自动移动到下一个幅面。
(2)提升装置
实现对装置中清扫小车的上拉和下放控制。由提升电机、滚筒、电缆轴、缆绳组成。依据清扫装置的重量选择合适的直流电机,能够进行正反转,以实现拉和放的控制。当行走装置停留在一个幅面上时,提升装置开始带动清扫小车从原始位置(下方)开始向上运动,运动到上端时,停留一个时间间隔后接着向下运动,回到原始位置。上下的停留位置需要由限位开关给出信号,限位开关的安装位置由光伏组件的上下边缘和清扫刷能够覆盖到的位置决定。
(3)清扫装置
通过电机带动清扫刷的运动去除组件表面的灰尘。该部分主要由电机、滚筒刷和用来实现传动功能的皮带轮构成。在提升装置带动清扫车进行上下运动的过程,清扫电机带动清扫刷转动,将灰尘扫去。该部分的运动较为简单,在提升装置带动小车上下运动的过程中,由电机带动刷子转动,对光伏组件表面的灰尘进行清扫。此装置的安装高度是调试制作过程中的关键点。高度适中能够保证有效的清扫,同时降低对表面的磨损。
(4)其他辅助装置
为实现自动控制功能,需要在部分位置安装限位开关,需要设计给行走、提升机清扫装置自供电系统。除此之外,可以根据需要安装例如温湿度传感器,风速仪等。用来检测自然环境,可以根据这些条件来控制装置何时运行或停止。
