复杂地形电力线机载激光雷达点云自动提取方法
2018-08-07沈小军于忻乐
沈小军, 秦 川, 杜 勇, 于忻乐
(1.同济大学 电子与信息工程学院,上海 200092;2.国网湖北省电力有限公司检修公司,湖北 武汉 430050)
随着经济的快速发展,为满足日益增长的电力需求,超高压大容量输电线路的建设数量及里程急剧增加,线路走廊穿越的地理环境日趋复杂,给线路运维带来了诸多困难[1].激光雷达(light detection and ranging,LiDAR)技术作为新一代遥感技术,以激光脉冲作为测量媒介,高度集成全球定位系统(global positioning system,GPS)、惯性导航系统(inertial navigation system,INS)以及激光扫描测距仪等先进设备,可快速获取高精度的目标的三维坐标,凭借激光脉冲穿透性良好的优势,可快速探测植被下的地表信息,在复杂地形、甚至危险地区的线路走廊三维信息获取中具有独特优势,已在输电线路巡检领域得到了运用和广泛关注[2-5].
基于机载激光雷达的输电线路巡检技术会产生海量的点云数据,快速、高效地实现线路走廊内的地物、杆塔、电力线及相关附件的点云数据的分割提取能有效提升该项技术的时效性和工程应用价值.文献资料检索分析结果表明,电力线的自动提取虽受到了一定关注,但相关研究尚处于起步阶段[6-9].文献[6]提出了一种基于高程阈值分割的分割算法实现地面点的剔除,但是该方法仅适用于地形平坦且干扰较少的场合,对于地形起伏大、干扰物多的线路区段滤波效果差;文献[7]采用一种基于角度的滤波方法实现植被点与电力线点分离,利用二维Hough变换分离各条电力线,并根据双曲余弦函数拟合单条电力线,但存在着树木和电力线混合区域的提取结果差的问题;文献[8]提出了一种基于监督知识的输电线与周边地物的分类方法,并利用局部仿射模型将输电线点云分割成段,该方法存在操作复杂繁琐、精度较低等问题;文献[9]提出了一种局部高程直方图模式分类滤波算法,通过将点云分布情况分为三种模式,并分别选定分割阈值实现电力线、电塔、地表点的自动分类,但该方法存在着将杆塔横担点误判为电力线点的问题.
电力线准确、高效提取是电力线拟合重建的关键和前提,也是电力巡线和后续应用分析评估的基础数据,关系到输电线路三维实景量测评估的应用效果,然而现有电力线提取方法在算法的可靠性与通用性方面尚有不足,电力线提取精度仍有待提高[10-15].鉴于此,本文从电力线机载LiDAR点云数据的数据结构特征出发,在分析地形起伏较大区域中传统方法提取电力线出现缺失问题的基础上,提出基于子空间特征的高程阈值分割算法以及高程密度分割算法进行地物及杆塔点云分割,重点实现基于激光LiDAR点云数据的复杂地形下电力线高效精准提取,为机载激光雷达海量点云数据的处理提供参考.
1 电力线点云自动提取问题描述
1.1 架空线路机载LiDAR点云特征
由架空线路机载LiDAR扫描作业方法可知,线路机载LiDAR点云数据中除电力线点云外,还含有杆塔点云与地物点云等,如图1所示.杆塔点及地物点的自动识别与分割是实现电力线点云数据自动提取的必要环节,为提高地物、杆塔以及电力线点云的提取效率与精度,需对架空线路机载LiDAR点云数据分布及结构特征进行分析.
Fig.1PointclouddataoftransmissionlinecorridorbasedonairborneLiDAR
(1) 水平空间上的分布特征
架空线路通常需要穿越平原、丘陵、山区等多种复杂地形,在不同地形中点云数据分布存在一定特征差异:在平原等地形变化较小的平坦区域中,各杆塔基本处于同一水平高度,且电力线点云分布高程空间与地面点分布高程空间无重叠;在丘陵、山区等地势起伏较大区域,由于地形变化大,往往造成相邻两杆塔水平高度不一致,甚至出现一端杆塔塔顶比另一端杆塔底端更低的情况,此时,电力线点云分布高程与地面点分布高程将发生重叠.
(2) 垂直空间上的分布特征
在一定区域范围内,按高程大小从下往上依次为地物点、杆塔点与电力线点:地物点云分布于整个区域,具备高程值较小、连续分布等特征;杆塔点云分布较为集中,高程分布范围较广,但具有水平投影后基本分布在一个小范围的矩形区域中,密度较大的特征;电力线点云在三维空间中呈线状分布,由于安全需求,通常与地面具有较大的高程差,且密度最小.在沿导线走向小距离尺度内,地物、杆塔及导线存在清晰的且具有普适性的空间高程分布特征,电力线及杆塔高程在局部范围内要显著大于地面高程.
1.2 传统电力线自动提取算法局限性分析
电力线自动识别与提取的过程即为剔除电力线点云以外其他物体点云的过程.由于输电线路机载激光雷达点云数据中除电力线点云外主要包含地物点云及杆塔点云,因此,电力线自动识别与提取过程主要分为地物点云识别与分割、杆塔识别与分割两部分.通过输电通道机载激光雷达点云特征分析可知,电力线及杆塔高程在局部范围内要显著大于地面高程,而杆塔点在水平面上投影密度比电力线大,可分别利用高程信息和投影密度差来实现地物点分离以及电力线提取[6,9].传统方法即是利用高程阈值分割法与高程投影法实现地物点分割以及电力线的提取,基本原理为:

(1)
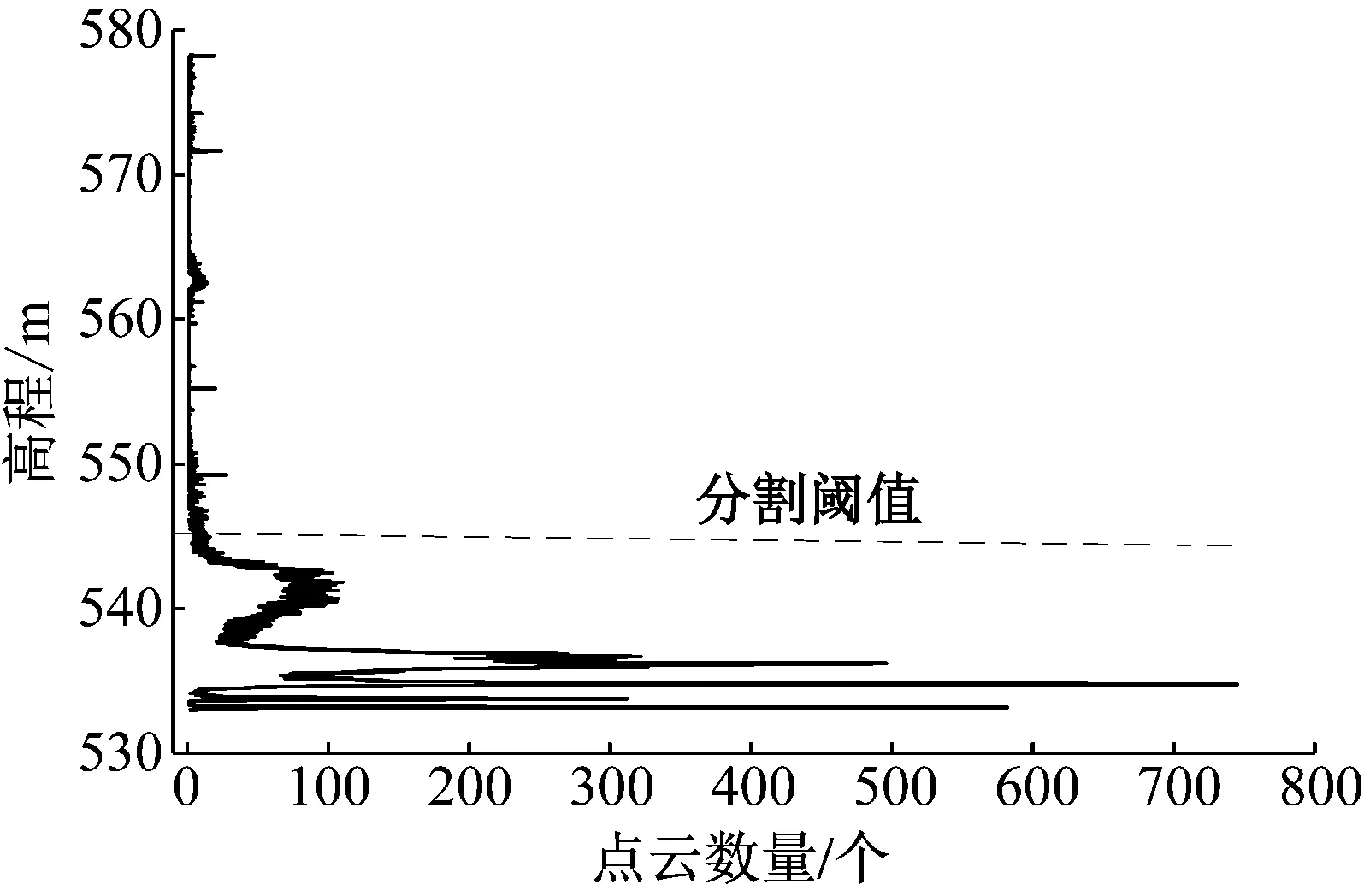
图2 高程分布直方图与分割阈值选取示意图Fig.2 Height distribution histogram and threshold selection
在实现地物点分割的基础上,把非地物点向水平面进行投影,然后将投影面按照一定间隔平分为多个网格,通过统计每个网格中点云的个数作为网格中的点云密度值,并根据密度阈值将网格中的点划分为非电力线点以及电力线点,实现电力线的提取.该环节需将三维点向二维平面进行投影,在二维平面中分别找到电力线与非电力线点之后,再次进行二三维点云对照,实现电力线、杆塔点云的三维空间定位,多次的二三维映射会影响算法效率.
理论分析与工程实践表明:传统方法应用在地形变化较小的平坦区域时,非地物点分割与电力线提取的效果良好,但是在地形起伏较大的地形存在较大问题.分析传统算法中高程阈值的分割原理可发现:该算法是利用档距整体点云数据的平均高程信息确定分割阈值,在地形平坦区段,由于电力线与地物点层次分明且地物点所在高程范围的点云密度明显大于电力线所在高程范围的点云密度,该算法确定的阈值分割效果良好;在地形起伏较大的区段,由于电力线点云高程分布空间可能与地物点高程分布空间出现重叠,当分割阈值在重叠区域中时,将造成部分电力线点被判断成地物点删除,且高于阈值的地物点无法剔除,电力线提取效果差,如图3所示.

a 点云高程分布

b 地物点分割

c 电力线提取
从图3可以看出,由于左端地势明显低于右端地势,整体点云的分割阈值处于左端电力线与右端地面点之间,造成部分电力线被剔除(图中圈出区域),导致电力线提取不完整.
2 复杂地形下电力线自动提取算法
为了有效解决传统电力线点云自动识别与提取算法所存在的不足,本文分别从地物点云识别与分割、杆塔点云识别与分割两个方面进行改进,实现复杂地形下的电力线点云的自动提取.
2.1 地物点云识别与分割算法
由1.2节可知,传统的高程阈值分割算法在地形起伏较大区域地物点分割时存在地物点以及电力线误识别的问题,是因为将完整档距数据采取了整体处理的策略,不能区分电力线点云分布高程与地面点云分布高程的重叠.但在沿导线走向小距离尺度内,地物、杆塔及导线存在清晰的且具有普适性的空间高程分布特征,电力线及杆塔高程在局部范围内要显著大于地面高程.利用子空间划分的方式,将长距离、复杂地形下的地物点识别问题转化为小距离尺度内具有普适性的空间阈值分割问题,解决了传统的高程阈值分割法在复杂地形下因电力线与地物点高程重叠区间导致的电力线误识别问题,在理论上效果可期.为此,本文在高程阈值分割算法的基础上,提出并采用基于子空间特征的差异化高程阈值分割算法剔除地物点云,算法工作原理如下:
首先求出整个原始点云数据的边界值,确定初始点云分布空间M0:
(2)
式中,(x,y,z)为任意一个点云的三维空间坐标值.
其次,依据具体情况,选取合适的划分尺度dx,沿X轴将整个点云空间划分为n个子空间,如式(3)及图4所示.

n=
(xmax-xmin)

/dx+1
(3)
式中:

(xmax-xmin)

表示求取不大于(xmax-xmin)的最大整数.
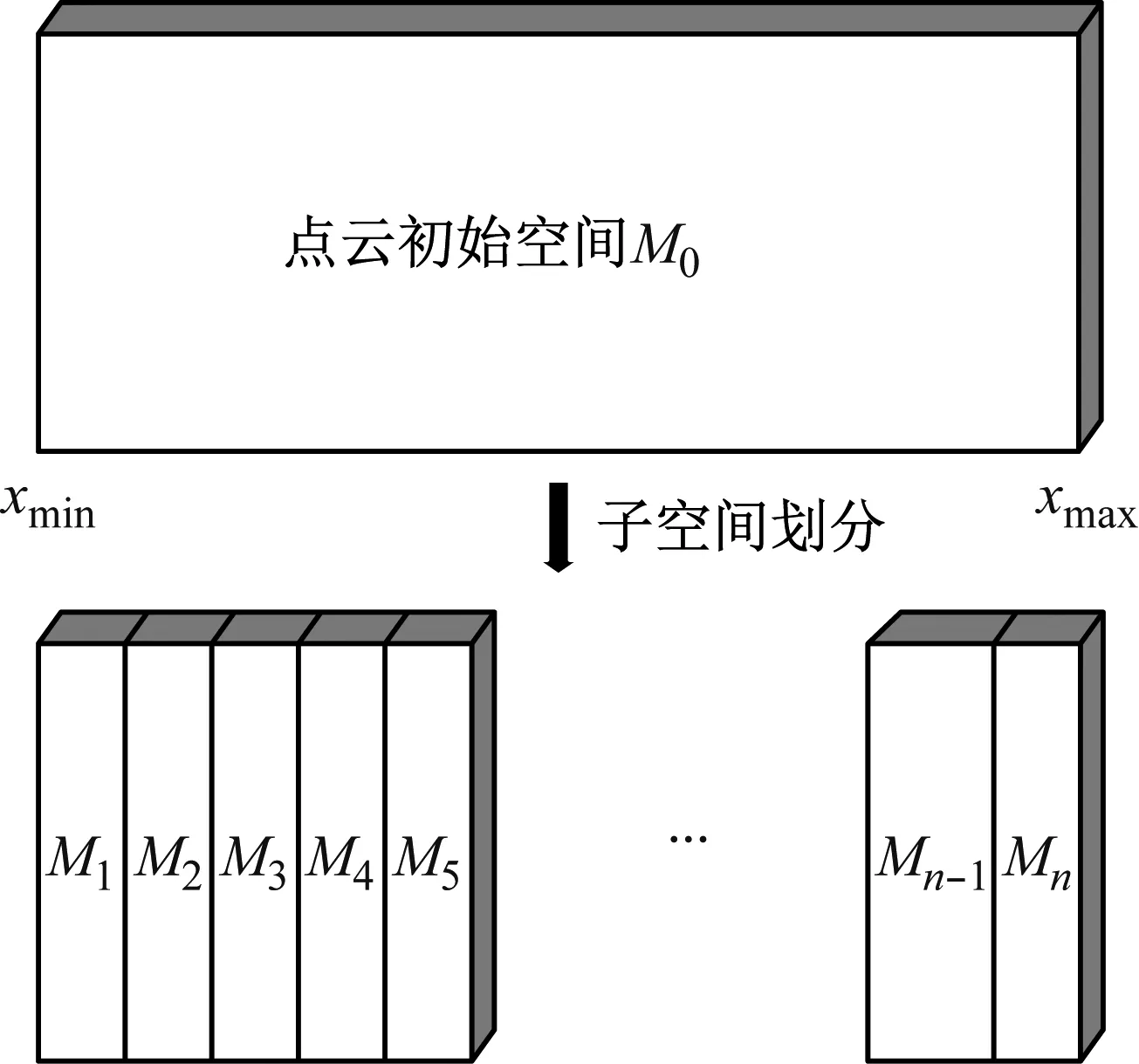
图4 基于X轴的子空间划分示意Fig.4 Subspace division based on X axis
然后,应用式(4)统计每个子空间Mi(i=1,2,3,…,n)中点云的高程差δi,以δi作为子空间Mi的特征值.
δi=zmax-zmin
(4)
最后,设置临界值δz,并依据特征值δi对子空间进行归类:若δi>δz,则归为A类;若δi≤δz,则将该子空间归为B类.其中,B类子空间中的点云可认为是纯地物点云;A类子空间中的点云仍含有地物点与非地物点,可分别利用高程阈值分割法作进一步分割.基于子空间特征的高程阈值分割算法剔除地物点云的流程如图5所示.
2.2 杆塔识别与分割算法
经过2.1节地物点云识别与分割之后,非地物点中仍可能含有电力线点与杆塔点以及少量树木及高坡顶端点云,为提取电力线点云,需将杆塔及其余树木及高坡顶端点云作进一步剔除操作.
点云特征分析结果表明,杆塔点以及树木或者高坡顶端点在水平面上投影密度均比电力线大,两者都可利用密度差异进行剔除,因此,为方便描述,下文中将杆塔点以及树木或者高坡顶端点统称为杆塔点.此外,由于2.1节所提算法存在多次迭代计算,效率较低;同时考虑到传统的高程投影算法存在多次二三维映射导致算法效率进一步降低的问题,为保证杆塔识别与分割的精度同时有效提高算法效率,本文提出采用高程密度分割算法实现杆塔及部分高程剩余物的识别与分割,算法的工作原理如下:
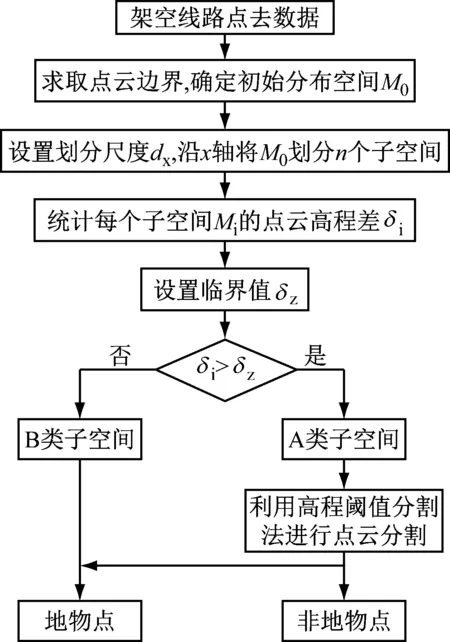
图5 基于子空间特征的高程阈值分割算法流程
Fig.5Flowchartofelevationthresholdsegmentationalgorithmbasedonsubspacefeature
首先,对杆塔及电力线点云边界进行定位,确定点云初始空间M0.其次,选取合适的划分尺度dx、dy,分别沿X、Y轴将初始空间M0划分为m×n个子空间Mi,j(i=1,2,…,m;j=1,2,…,n),如式(5)及图6所示.
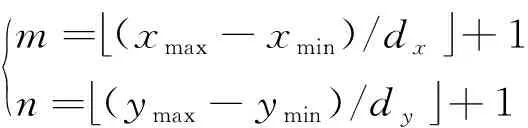
m=(xmax-xmin)/dx+1n=(ymax-ymin)/dy+1
(5)
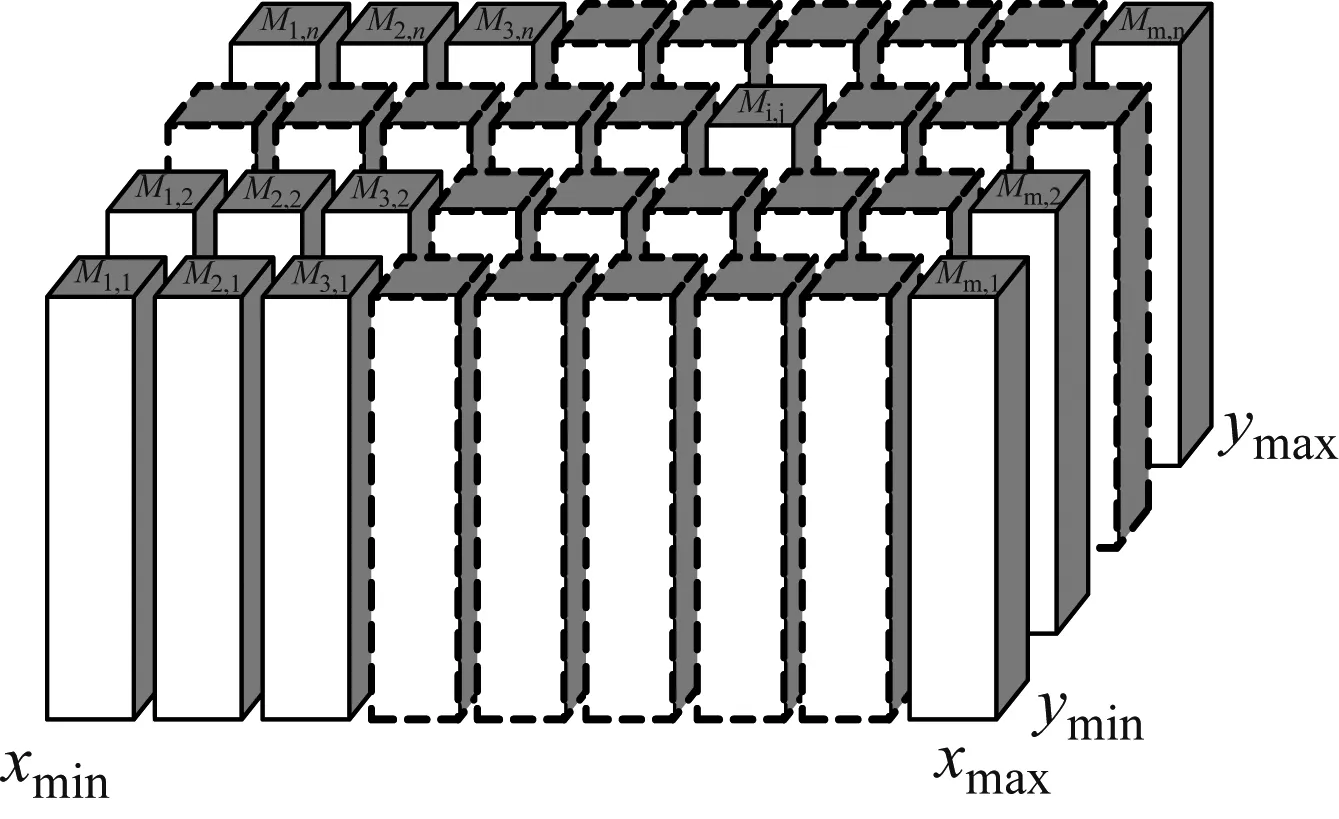
图6 基于X、Y轴的子空间划分Fig.6 Subspace division based on X and Y axis
然后,统计每个子空间Mi,j的点云数量值Ci,j,以Ci,j作为该子空间的特征值.根据子空间及点云密度合理设定阈值C0,并依据C0将所有子空间分为两类:大于阈值C0的子空间内的点为杆塔点,小于阈值C0的为电力线点.需指出,由于扫描仪型号、扫描精度不同导致采集到的点云质量也有所差异,因此,C0的设定需根据实际采集到的点云质量及子空间尺度大小合理选择.最后,将属于杆塔与电力线点的子空间分别提取出来,完成杆塔与电力线的分割,实现电力线点云数据的提取.基于高程密度分割算法的杆塔及部分高程剩余物的识别与分割流程如图7所示.
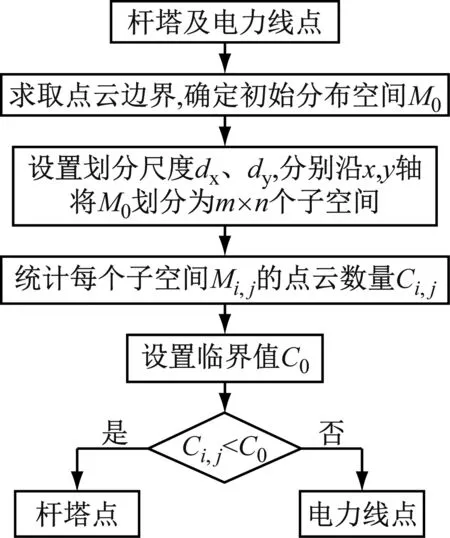
图7 高程密度分割算法流程Fig.7 Flowchart of Elevation density segmentation algorithm
3 可行性测试与讨论
3.1 算法提取效果验证
为验证本文提出的复杂地形下电力线自动提取算法的有效性,选取机载激光雷达实测的500 kV凤凰山变电站出线杆塔的部分选段数据(该段数据为地形起伏较大地区的单档距点云数据,长608.5 m,以下简称起伏段,如图8所示)作为试验对象,并以算法运行能力较强且具备一定图形展示功能的Matlab2016a作为算法测试及效果展示平台进行了可行性试验(地物分割时,取dx=5 m;杆塔识别中,取dx·dy=0.5 m×0.5 m),试验结果如图9所示.
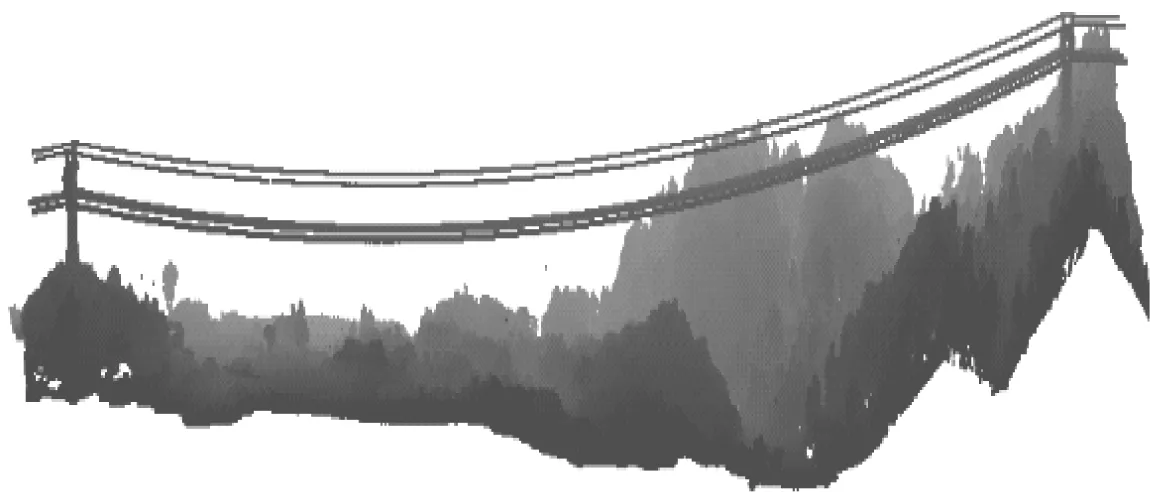
图8 部分选段数据Fig.8 Partial selection data
首先利用基于子空间特征的高程阈值分割法进行地物点识别与分割,起伏段分离后的杆塔及电力线点云如图9a所示,从图9a中分割结果可以看出,该方法能够有效地将地物点剔除,仅留下少量树木、高坡顶端、杆塔点及电力线点,且电力线点保留完整;然后依据高程密度分割算法进行杆塔(包括少量树木及高坡顶端点)分割及电力线的识别与提取,提取结果如图9b所示,从图9b中可得,除部分杆塔区段电力线点云由于杆塔点云干扰被识别成杆塔点云遭剔除外,其余区域电力线点云均得以完整识别与提取,有效解决了传统方法在起伏段电力线提取中造成电力线点被误认为地物点或杆塔点剔除的问题,提取效果良好.
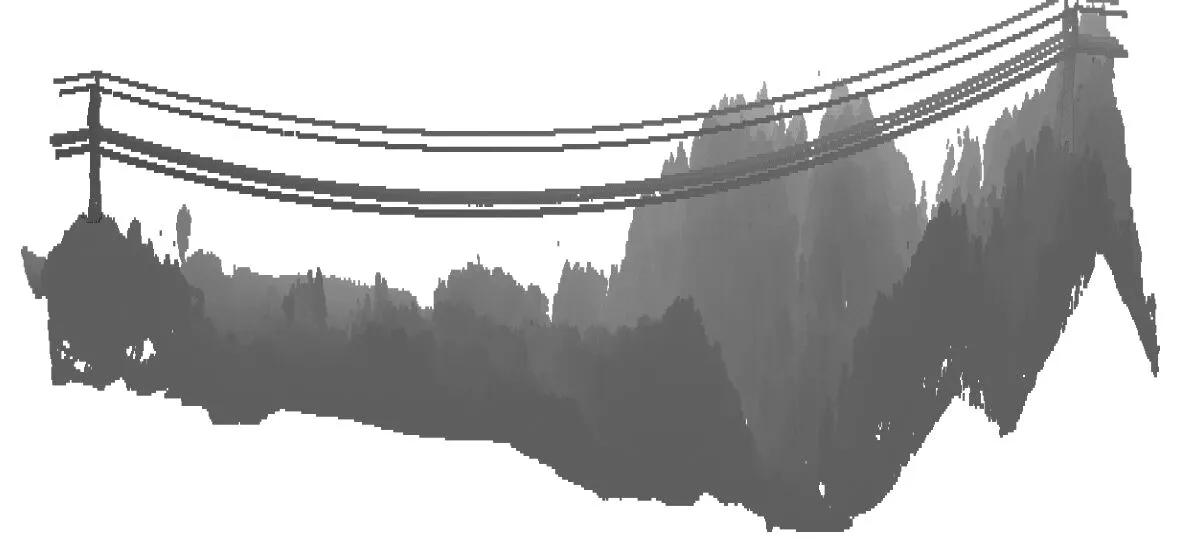
a 地物点分割结果
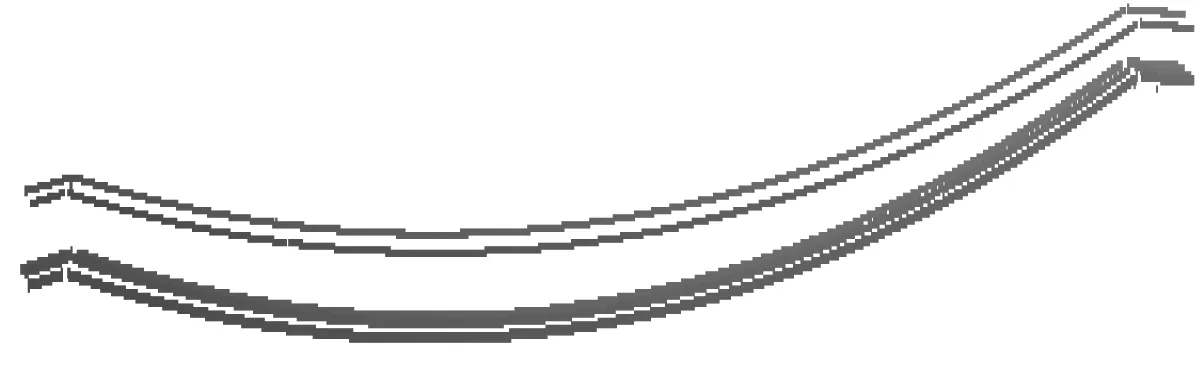
b 电力线提取结果
3.2 算法提取正确率及提取效率对比分析
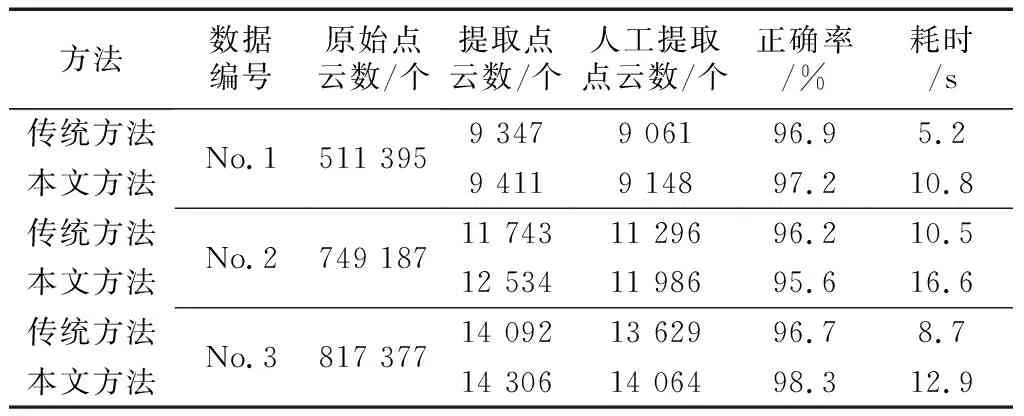
为进一步测试算法效率,验证本文所提算法可靠性,另外选取三组地势平坦区域的单档距电力线点云数据(档距分别为210.8,215.5,354.2 m,标记为No.1,No.2,No.3),分别利用传统的电力线自动提取算法与本文提出的改进算法进行电力线自动识别与提取测试,并统计各算法的处理时间以及提取的点云个数,然后对提取的电力线点云进行人工复核,通过人工删除非电力线点,统计留下的电力线有效点个数,并以有效点与提取点个数之比作为算法提取电力线点云的正确率,统计结果见表1.
表1平坦地区电力线点云提取结果对比
Tab.1Comparisonofpowerlinepointcloudextractionresultsinflatarea
方法数据编号原始点云数/个提取点云数/个人工提取点云数/个正确率/%耗时/s传统方法本文方法No.1511 3959 3479 4119 0619 14896.997.25.210.8传统方法本文方法No.2749 18711 74312 53411 29611 98696.295.610.516.6传统方法本文方法No.3817 37714 09214 30613 62914 06496.798.38.712.9
由表1可知,本文提出的方法提取的电力线点云数量与传统方法提取的电力线点云数量相当,但都比人工提取点云数量多,这是因为电力线点云相邻空间存在的少量噪点,具有与电力线相似的空间特征,本文提出的方法与传统方法均未能有效将其剔除,造成比人工提取的电力线点云有效点数量多,但两种算法正确率均在95%以上,基本满足工程应用.当然,理论分析认为噪点的存在可能会干扰电力线的拟合精度,特别是悬挂点和弧垂最低点,后续可通过研究电力线点云修正方法进一步提高电力线点云提取精度;平坦地形下,本文提出的算法比传统算法耗时多,提取效率有所下降,主要原因在于地物分离时将整个点云空间划分为多个子空间,多次阈值计算使得算法运行时间较长.需指出的是,由于点云分布特征不同,不同数据样本的耗时长短不存在可比性.
综上所述,本文提出的电力线提取方法在地势起伏较小的平坦地区,电力线点云自动识别提取结果与传统电力线自动提取算法的结果基本一致;在地势起伏较大的山区,所提算法能够有效解决传统算法无法实现电力线完整识别与提取的问题,电力线点云提取效果较好,具有工程实用性.
4 结论
本文提出的基于机载激光雷达点云的电力线自动提取算法不仅能够实现地势平坦地区架空线路电力线点云数据的准确提取,而且能够提高地势起伏较大区域电力线提取的准确性与完整性,有效解决了传统方法在地表起伏较大区域内电力线提取不全的问题,通用性与可靠性较高.后续可结合电力线分布特点,研究电力线点云修正方法,并基于修正点云进行电力线悬挂点、最低点等关键参数提取.
