数字控制的移相全桥零电压变换器设计
2018-08-06姜婷婷周松林
姜婷婷,周松林
(铜陵学院 电气工程学院,安徽 铜陵 244061)
在中大功率DC/DC变换器中一般采用全桥变换的电路结构[1-3],移相PWM控制方式因为具有很多的优良性能而应用得十分普遍,在零电压或零电流的条件下导通或关断的功率器件,由于采用了软开关技术可以大大降低开关管的损耗.在控制策略方面,常规PID电压型控制通过测量变换器输出电压实现闭环控制,López-Flores D R等人[4]采用电压型控制实现了移相全桥变换器的闭环控制,但动态响应不够迅速.
本文采用移相PWM控制结合软开关技术,实现了超前相臂和滞后相臂的软开关.另外主要介绍了电流型控制方式及数字位置式PID控制的实现,并搭建了一台100W的实验样机,经实验结果分析此方案实现零电压是可行的,且控制效果良好.
1 主电路拓扑及工作原理
移相全桥ZVS DC/DC变换器主电路结构[5,6]如图1所示.其中Q1和Q3组成超前桥臂,Q2和Q4组成滞后桥臂.C1~C4分别是Q1~Q4的谐振电容,包括寄生电容和外接电容.Lr是谐振电感,包括变压器的漏感.Q1和Q3分别超前Q4和Q2一个相位,即移相角,通过调节移相角大小可调节输出电压值[7].移相控制ZVS PWM DC/DC全桥变换器在一个开关周期中,开关模态也有12种[8],主要波形如图2所示.
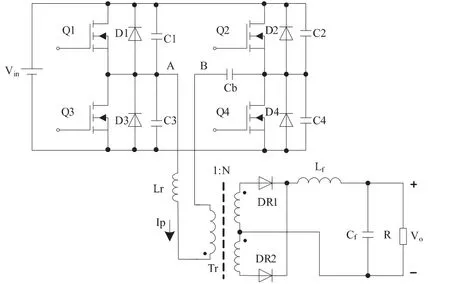
图1 移相全桥ZVS变换器主电路拓扑

图2 移相全桥ZVS波形图
移相全桥软开关变换器对角线开关管驱动信号,即Q1和Q4或Q2和Q3,两开关管之前相位差决定了移相角的大小,如图2所示,通过调节移相角来调节输出电压,让超前臂Q1或Q3上电压领先于滞后臂Q4或Q2上电压一个相位,并对同一桥臂的两个反相驱动信号设置死区时间,便可以利用变压器漏感、开关管结电容及变压器一二次侧之间的寄生电容来完成谐振过程,巧妙地实现开关管零电压开通或关断,完成软开关方式.
2 小信号建模
因为从工作方式上,Buck变换器和全桥变换器相似,所以先建立Buck电路的小信号模型[9,10],再通过相关等效变换得到移相全桥ZVS DC/DC变换器的小信号模型.
移相全桥变换器与Buck电路不同,副边占空比丢失是移相全桥ZVS PWM变换器一个重要的现象.副边的占空比Dy小于原边的占空比D,其差值就是副边占空比丢失,即Dy=D-Dloss,其中 Dloss为丢失占空比,可知 Dloss=2Lr(Ic+NIo)/VinTs[11],其中Ic和Io分别为输出滤波电容上电流和输出电流,所以

由式1可看出,Dy受原边占空比D,输出电流Io以及输入直流电压Vin三者的共同影响.若D、Io、Vin产生扰动,则Dy也会产生与三者相对应的扰动.设由D、Io、Vin产生的扰动量分别为它们使 Dy产生的相应扰动量分别为

根据以上分析可知,原边占空比的扰动对有效占空比的影响为

输出电流的扰动对有效占空比的影响为

输入电压的扰动对有效占空比的影响

所以根据以上分析,可用Dy代替D,用NVin代替Vin就可以得出移相全桥电路小信号模型[12],如图3所示.

图3 ZVS移相变换器小信号模型

由此求得移相全桥变换器的传递函数分别为式8和9所示,

式中,Rd=2N2Lr/Ts=2N2Lrfs.
3 基于STM32F407的控制系统设计
由系统框图4可以看出,变换器的电压电流信号经过隔离和调理后送入数字控制器STM32F407VG的AD,根据输入采样信号的大小计算误差信号,误差信号又经电流型控制的补偿环节,分别为电流环PID和电压环PID控制器,其中电流环为内环,电压环为外环,最后得到PWM控制量送入移相PWM发生器,调整移相角的大小,完成电流型控制.
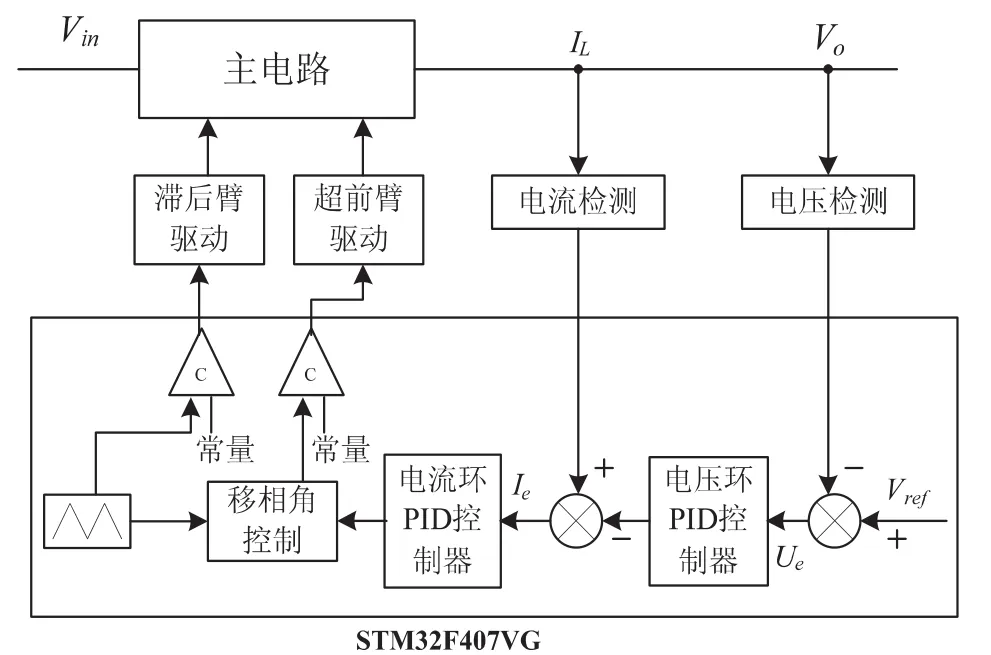
图4 系统硬件结构图
3.1 驱动信号的产生
STM32F407VG拥有丰富的定时器资源,包括12个16位通用定时器,2个32位高精度定时器,2个高级定时器和2个基本定时器[13].2个高级定时器(TIM1和TIM8)分别拥有4个可以配置成互补输出的比较通道,并在硬件上支持死区插入.同时为了加强定时器之间的沟通,每个定时器都可以配置为主模式和从模式,从定时器可以被主定时器复位,触发或者门控,利用从模式控制器,可以无程序介入地产生所需的移相全桥控制信号.将TIM1配置为主定时器,通道1作为超前臂Q1和Q3的互补PWM输出;TIM8配置为从定时器,通道1作为滞后臂Q4和Q2的互补PWM输出.
如图5所示,超前臂开关管Q1和Q3分别由TIM1的CH1和CH1N驱动,滞后臂开关管Q4和Q2则分别由TIM8的CH1和CH1N驱动.TIM1的通道4比较匹配信号作为TIM8的复位控制信号,因此写入TIM1_CCR4值的大小决定了移相角的大小,此过程无须程序介入,大大提高了工作效率和系统可靠性.
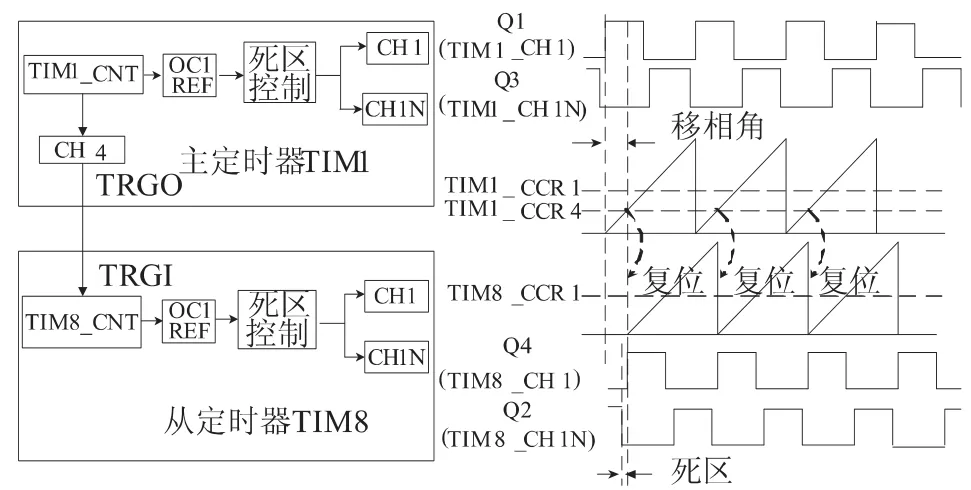
图5 移相驱动信号的产生
3.2 数字双闭环PID控制设计
数字PID控制属于一种采样控制,它只能根据采样时刻的偏差值计算相应控制量.本设计的电流型控制,电流环和电压环补偿均采用位置式PID控制算法.

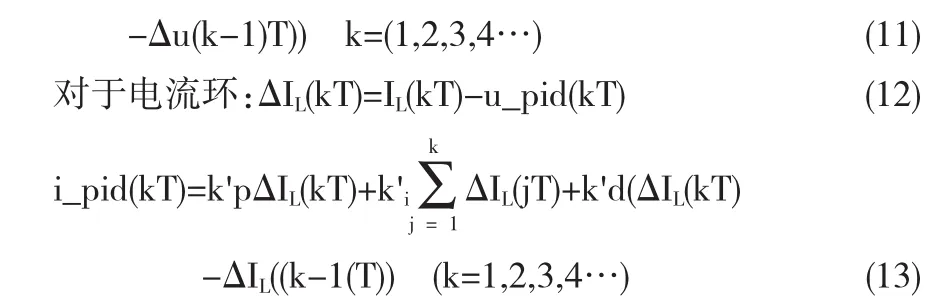
其中Δu(kT)、ΔIL(kT)分别表示第k个采样周期的电压环和电流环的输入差值,ΔVo(k)表示参考电压值和实际电压值的电压误差信号,kp、ki和 kd是电压环的 PID 参数,k'p、k'i和k'd是电流环的PID参数,u_pi(kT)和i_pi(kT)分别表示电压环和电流环的输出值.
3.3 软件实现
控制系统的软件部分由三部分组成,即系统初始化和主循环.初始化程序主要完成系统启动后时钟设置,外设配置等,为后面的程序准备好运行环境.主程序则是双闭环控制的核心所在,完成PID调节和过流保护功能.流程图如下图6所示:

图6 程序流程图
4 样机实验调试与分析
电路主参数:输入电压Vin=20V,输出电压Vo=100V,开关频率fs=24kHZ,功率100W的DC/DC变换器,负载电阻RL=120Ω,开关管导通内阻 RDS_ON=0.01Ω,谐振电容C=100nF,谐振电感Lr=3uH,隔直电容Cb=100uF,变压器原副边比1:N=1:8,原边自感100uH,滤波电感Lf=2mH,滤波电容Cf=220uF.
4.1 MATLAB仿真实验
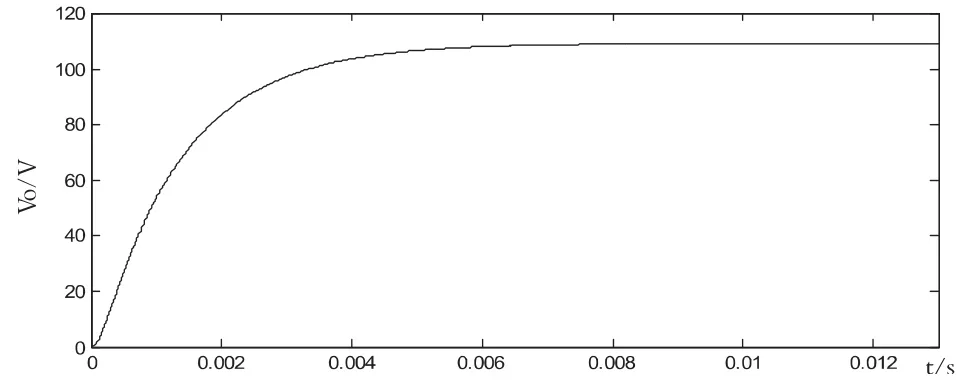
图7 输出电压仿真结果

图8 零电压开关管仿真波形
由仿真结果看出,输出电压稳定在100V左右,且稳定时间较短,系统稳定性良好,动态响应迅速.
4.2 样机调试实验
搭建了实验样机,实验样机如图9所示,实验波形如图10、11和 12.

图9 实验样机

图10 输出电压波形
输出电压波形稳定,没有出现尖峰和抖动.设定100V输出时,用万用表测试输出电压为99.8V,纹波电压低于0.5V,证明双闭环控制发挥了良好的效果.
如图11所示,原边电流波形和理论分析相一致,在对角的开关管打开时,原边电流缓慢增加,超前臂关断后,电流开始缓慢下降,经历移相时间后,滞后臂关断,变压器原副边电压均为0,原边谐振电感承受电源电压,电流迅速下降,进入换流阶段.

图11 原边电流波形

图12 零电压开关管波形
如图12所示,可以看出在额定负载条件下,超前臂和滞后臂均很好地实现了零电压开关.在开通信号VGS到达之前,开关管漏源电压已下降到零,但开关管两端电压有震荡和尖峰现象.从实验波形图可以看出,实验样机可以很好地实现软开关,与文中所述的原理分析一致,达到设计要求.
5 结论
提出了一种采用软开关技术且采用电流型控制方案,由仿真实验和样机调试的实验结果可知移相全桥零电压变换器控制系统设计合理,基于数字控制的数字PID控制算法合适,开关管可以较好实现ZVS开通,系统工作正常,静态性能和动态性能良好,输出电压在误差允许范围内,动态响应良好,可较好完成软开关和闭环控制,具有一定实用性.
