免耕播种机精量穴施肥系统设计与试验
2018-07-28李宝筏
吴 南 林 静 李宝筏
(1.沈阳农业大学工程学院, 沈阳 110866; 2.辽宁机电职业技术学院材料工程系,丹东 118009)
0 引言
科学施肥是保护性耕作的一项重要内容,是提高作物产量的重要因素之一。精量穴施肥技术是一种提高肥料利用率、保护土壤环境的有效途径,对实现“高产、优质、高效、环保和改土”农业综合目标具有重要意义[1-3]。目前,国内免耕播种施肥主要采用侧位分施,一般为侧深施,采取粗放的条沟施肥方式一次播排混合肥料,没有针对特定种子,易造成营养成分过剩,肥料利用率不高,不仅造成经济损失,而且使土壤环境的营养平衡受到破坏,长期如此将造成严重的地下水污染、土壤矿化变硬、破坏耕层等问题[4-13]。
穴施肥技术针对每一粒种子施用一定量的肥料,可以提高肥料利用率,降低化肥使用成本,改善因化肥施用不当造成的农业污染问题[14]。张勋等[15]设计了穴播穴施肥装置控制系统,在窝眼轮式排肥装置上增加了肥料二次定位机构,实现了穴播穴施肥控制功能。李沐桐等[16]通过试验分析穴施肥控制机构的结构和工作参数,研究施肥传动机构工作参数对施肥控制精度的影响规律,设计了玉米苗期自动穴施肥控制机构,实现了对中耕作物的自动穴施肥。胡红等[17]设计了一种玉米行间定点扎穴深施追肥机,能够在行间距600 mm的玉米行间进行追肥作业,1次完成2行玉米扎穴追肥。开鲁县吉祥农机制造有限责任公司[18]发明了一种直插式中耕穴施肥机,可将化肥精确地施在农作物附近,提高化肥吸收率。张培坤[19]发明了一种起垄施肥机用穴施肥机构,通过在肥料出口设置肥料扩散堵盘,利用凸轮控制堵盘升降实现穴施肥。基于国内外专家学者对穴施肥装置的研究,本文结合玉米穴播穴施肥技术要求,设计一种穴施肥控制系统,通过穴施肥控制算法实现穴施肥位置控制。通过调节排肥轴转速和鸭嘴阀开合频率,实现穴施肥量控制。通过台架试验获得穴施肥装置较优的工作参数组合,以提高穴施肥系统的精确度和肥料利用率。
1 系统总体设计
1.1 穴施肥控制系统总体结构
为了提高免耕播种机施肥过程中肥料利用率,针对研制的2BMGYF-2型玉米垄作免耕播种机结构特点,设计了一种精量穴施肥装置,将其安装在免耕播种机原排肥器下方,实现免耕播种机精量穴施肥功能。免耕播种机穴施肥控制系统结构如图1所示[20]。
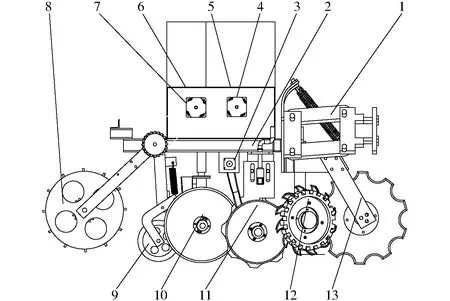
图1 免耕播种机穴施肥控制系统结构示意图Fig.1 Structure diagram of control system for fertilization control system of no-tillage planter1.四连杆机构 2.机架 3.穴施肥装置 4.施肥驱动电动机 5.肥箱 6.种箱 7.排种驱动电动机 8.镇压轮 9.覆土轮 10.播种开沟器 11.测深施肥开沟器 12.清垄轮 13.破茬盘
1.2 穴施肥控制原理
穴施肥控制系统由穴施肥控制器、播种控制、施肥量控制、肥料成穴控制4部分组成。控制系统原理如图2所示。
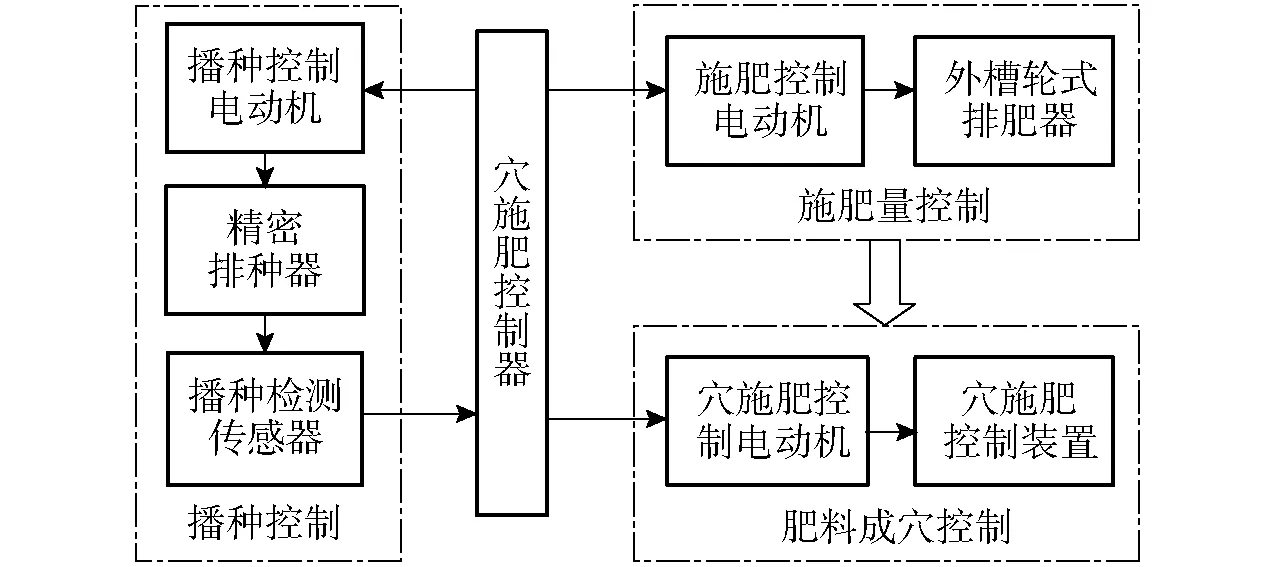
图2 控制系统原理图Fig.2 Structure diagram of control system
施肥控制电动机与外槽轮式排肥器排肥轴相连,通过控制电动机转速实现施肥量控制,在播种施肥作业时,排肥器根据设定的施肥量适时旋转,肥料经过排肥口落入穴施肥控制装置中,当播种检测传感器检测到播种信号,鸭嘴阀适时打开,将每穴肥料集中施入合理位置,穴施肥完成后,鸭嘴阀快速关闭,续存下一穴肥料,进而实现精量穴施肥控制。
2 穴施肥控制装置设计
穴施肥控制装置由穴施肥装置和控制电动机组成,穴施肥装置成穴部件是鸭嘴阀。玉米免耕播种机在较高工作速度下进行精密播种施肥作业,要实现精准穴播种肥,鸭嘴阀开合需具有较高的频率,摇杆机构直接控制鸭嘴开合,其参数对穴播质量至关重要,穴施肥装置由摇杆、推杆、导肥管、鸭嘴阀等组成,结构如图3所示。
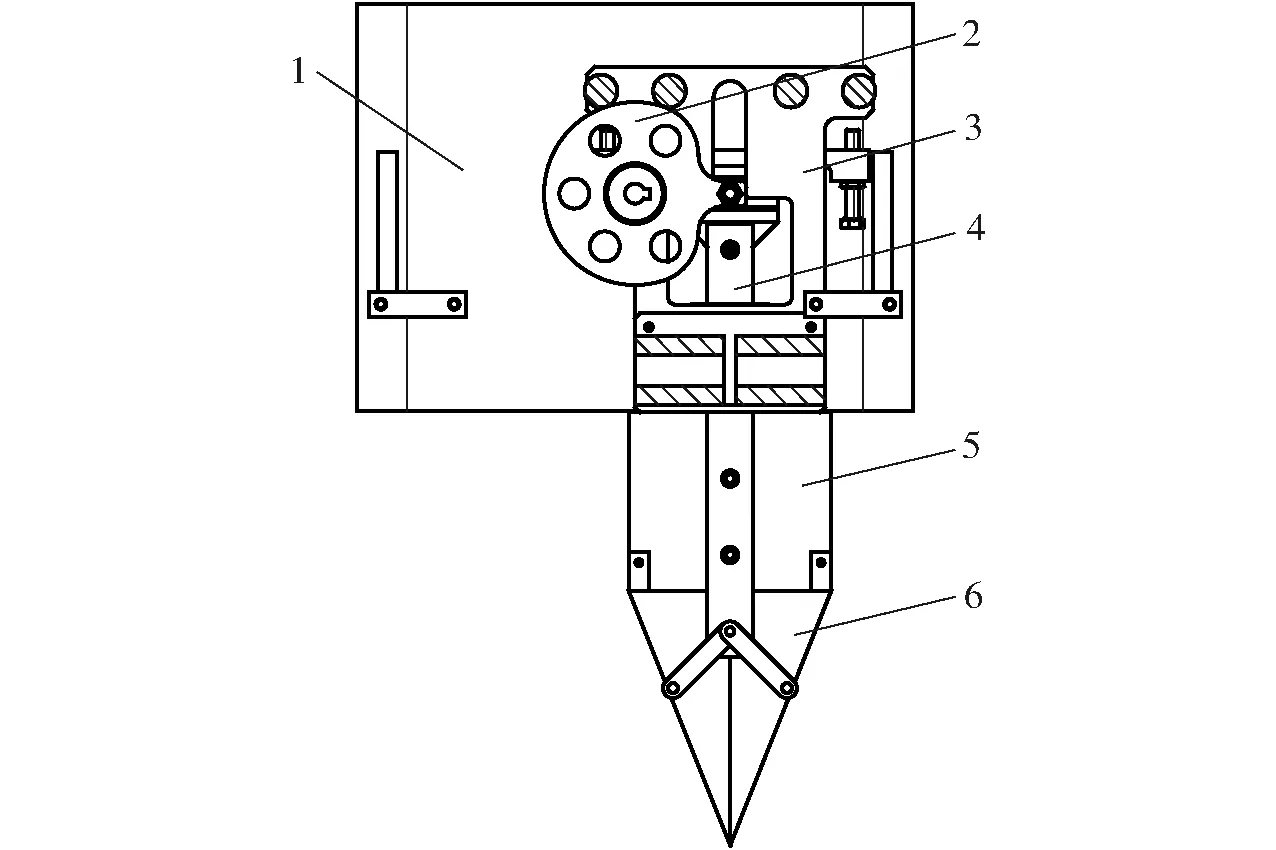
图3 穴施肥装置结构示意图Fig.3 Structure diagram of hole fertilization mechanism1.外壳 2.摇杆 3.支架 4.推杆 5.导肥管 6.鸭嘴阀
2.1 穴施肥装置设计
根据穴施肥运动要求及其结构尺寸,建立图4所示直角坐标系,α为鸭嘴阀支点C和F连线与水平方向夹角,β为鸭嘴阀侧边BE与垂直方向夹角,θ为推杆AD与连杆CD之间的夹角,δ为摇杆HG运动到IG转过的角度,均为角度变量[21]。
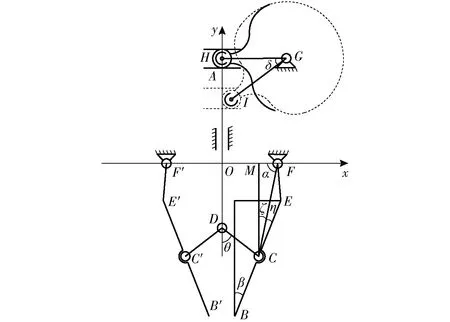
图4 穴施肥装置简图Fig.4 Diagram of hole fertilization mechanism
由图4的几何关系可以得到点C(x0,y0)的坐标方程为
(1)
点B(x1,y1)的坐标方程为
(2)
点D(x2,y2)的坐标方程为
(3)
由此可得推杆顶点A(x3,y3)的坐标方程为
(4)
2BMGYF-2型玉米垄作免耕播种机播种开沟器播种深度为40~70 mm,施肥开沟器施肥深度为70~100 mm。施肥开沟器采用双圆盘侧深施肥开沟器,施肥肥沟一侧为缺口圆盘,半径170 mm;另一侧为光面圆盘,半径150 mm,与缺口圆盘呈7°斜角[22-23]。穴施肥控制装置的鸭嘴阀安装在双圆盘开沟器夹角内,使穴施肥时不受外界环境和开沟深度影响。依据2BMGYF-2型玉米垄作免耕播种机侧深施肥器结构尺寸要求,鸭嘴阀开合工作时不能与双圆盘开沟器干涉,将鸭嘴阀安装在双圆盘开沟器后上方,鸭嘴阀顶点可在圆盘轴轴线上方,鸭嘴阀横向长度和高度应小于125 mm。双圆盘侧深施肥器结构如图5所示。
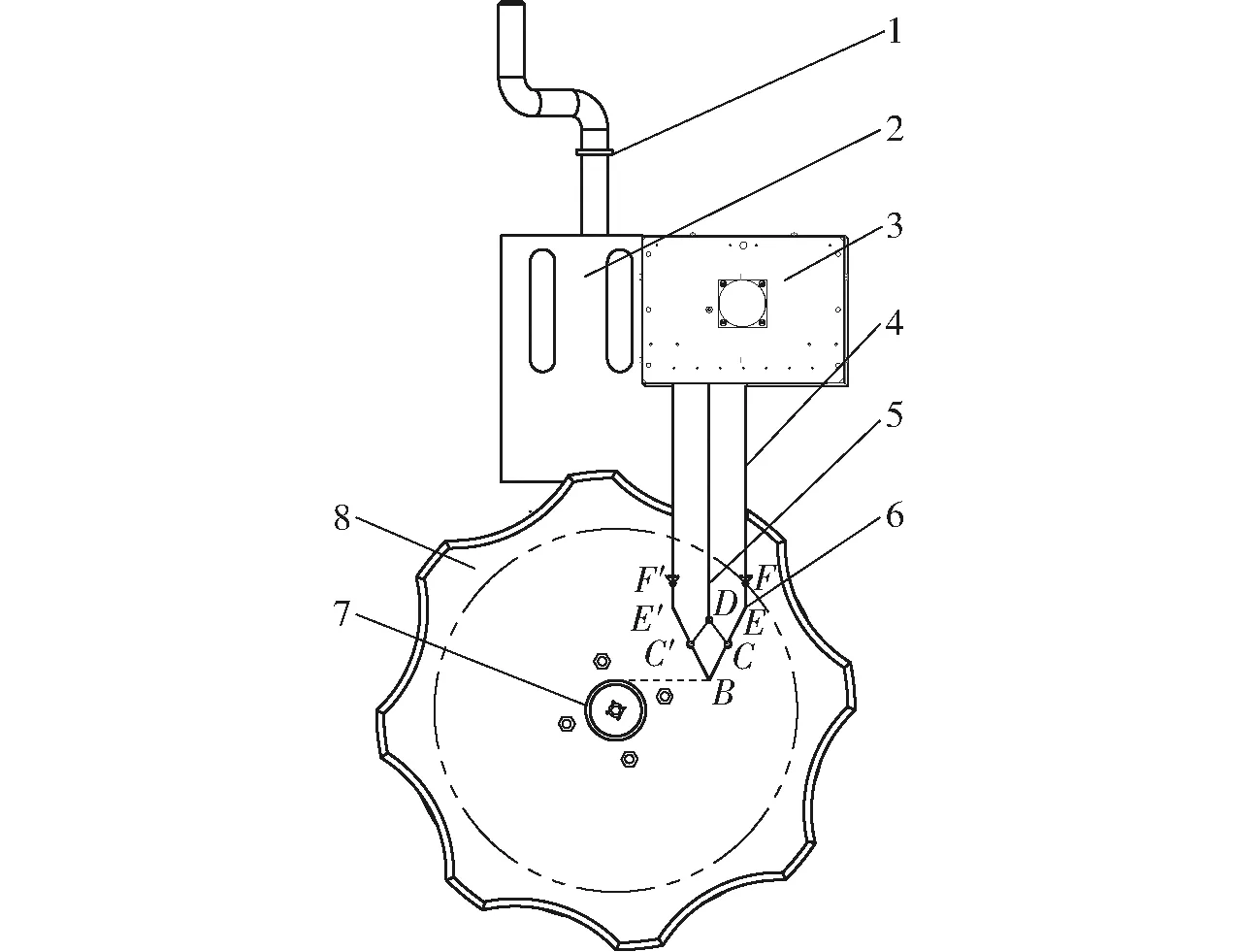
图5 双圆盘侧深施肥器结构图Fig.5 Diagram of double disc fertilizer attachment1.摇把 2.立板 3.穴施肥控制装置 4.导肥管 5.推杆 6.鸭嘴阀 7.圆盘轴 8.缺口圆盘
综合以上因素,本设计中鸭嘴阀横向长度取60 mm,纵向长度取20 mm,高度取80 mm,推杆长度lAD取240 mm,lEF取20 mm,lCD取25 mm,当鸭嘴阀闭合时,lOD取30 mm,则lBD=50 mm。可求得lBE=67.08 mm,β=26.57°,θ=36.88°,lCF=52.20 mm,各点坐标为C(15,-50),B(0,-80),D(0,-30),A(0,210)。依据各点坐标可知ζ=16.70°,η=9.87°,β=99.86°-α,从而可得
(5)
当鸭嘴阀开角最大时,即θ=90°,各点坐标为C(25,-51.96),B(16.12,-84.29),D(0,-51.96),A(0,188.04)。由此可知,鸭嘴阀推杆移动范围为0~21.96 mm。滚子半径取5 mm,当滚子由H(x4,y4)运动到I(x5,y5)点时,推杆向下运动21.96 mm,此时滚子与推杆中心相切,由此可知
(6)
得摇杆lHG为50.72 mm。以吉农4号肥,每穴施肥量10 g为例,肥料颗粒密度为1.22 g/cm3 [24],10 g肥料所占体积为8.22 cm3。鸭嘴阀为锥形结构,续存10 g肥料的高度约为2.06 cm。
2.2 穴施肥装置仿真
为保证穴施肥性能,对穴施肥装置成穴性进行仿真试验。试验以吉农4号肥为研究对象,肥料颗粒平均密度为1.22 g/cm3,等效直径为4.35 mm,肥料颗粒基本呈圆形,球形率0.95。应用颗粒系统仿真软件EDEM,分析在施肥粒距25 cm,穴施肥量5 g,播种速度3、5、7 km/h条件下鸭嘴阀的成穴性能[25]。
在播种速度3、5、7 km/h时,对应肥料颗粒流量分别为0.016 67、0.027 78、0.038 76 kg/s,鸭嘴开合周期分别为0.30、0.18、0.13 s,鸭嘴阀向两侧旋转角度为11.21°。试验在3种工况下从第5秒开始,记录30穴的施肥量,分析穴施肥效果。试验中设置流量传感器,每隔0.05 s记录一次落到地面的肥料质量流量数据[26],肥料质量流量随时间变化,每穴施肥量为肥料质量流量对时间积分,穴距为相邻两个质量流量峰值的间隔时间与传送带速度的乘积,穴施肥量仿真曲线如图6所示。

图6 穴施肥量仿真曲线Fig.6 Simulated curves of hole fertilization
穴施肥仿真试验数据表明,播种速度3 km/h,8.7 s施肥30穴,平均穴距24.90 cm;播种速度5 km/h时,5 s施肥30穴,平均穴距23.79 cm;播种速度7 km/h时,3.6 s施肥30穴,平均穴距23.28 cm。穴施肥仿真曲线表明,速度3 km/h时,波谷接近于零,表明肥料成穴性显著,随着速度上升,波谷波动较大,但波峰波谷分界显著,试验结果表明,在播种速度3~7 km/h时,鸭嘴阀成穴性能较好,随着播种机速度的增加,成穴性能逐渐减弱。
3 穴施肥控制系统设计
3.1 穴施肥控制算法
玉米穴施肥是将肥料成穴施入距穴播种子一定间距的位置,肥料成穴位于种子侧下方。肥料施用位置不同,直接影响增产效果和肥料利用率。穴施肥时肥料与种子垂直距离h2、水平距离a和播深是决定施肥位置的主要参数[27-30],h2由排种口和排肥口的安装位置决定,a可由穴施肥控制算法调节,播深由免耕播种机的开沟深度决定。种肥位置分布如图7所示。
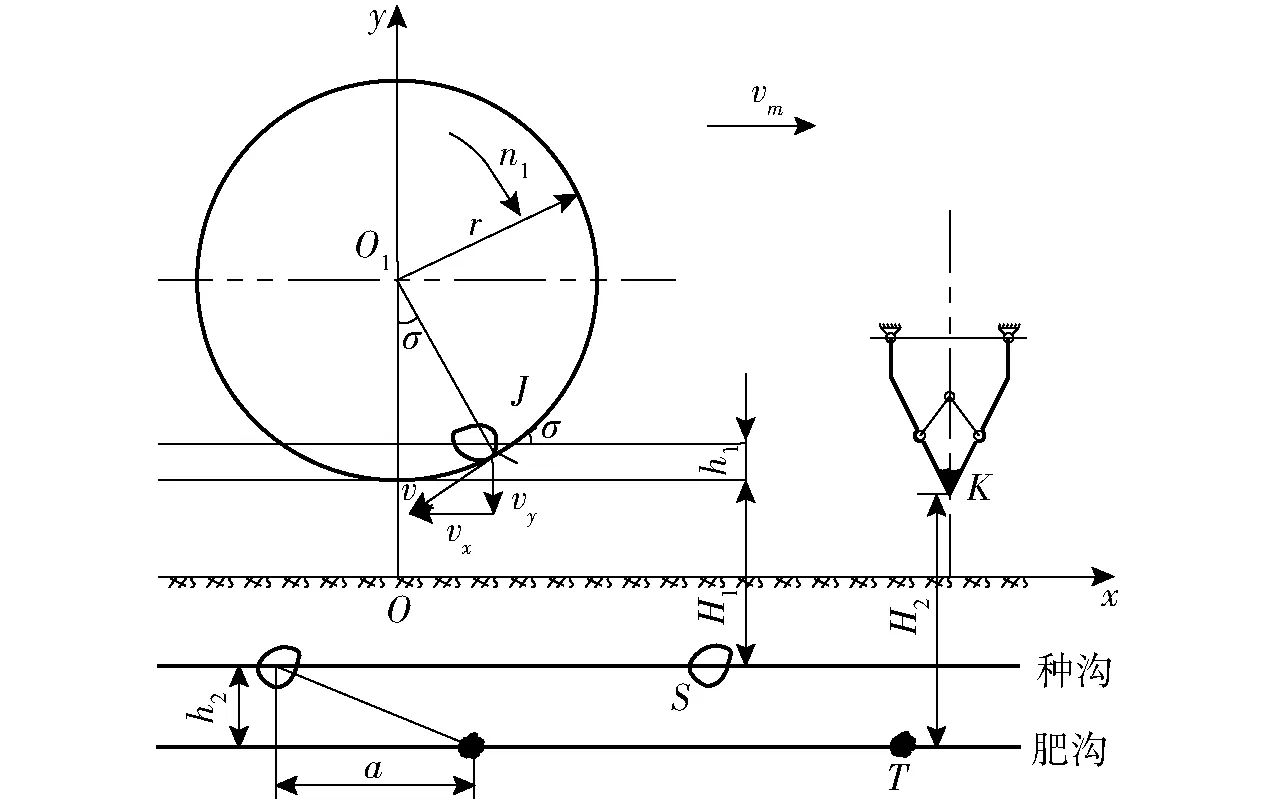
图7 种肥位置分布图Fig.7 Distribution diagram of seeds and fertilizer location
图中h1为排种口与排种轮底部垂直距离;n1为排种盘转速;σ为种子的投种角度;r为排种盘半径;H1为排种轮底部与种沟距离;H2为排肥口底部与肥沟距离;vm为播种机前进速度;S为第N粒种子的位置;T为第N粒种子穴施肥位置。排种器在J点开始投种,种子脱离排种口时水平速度和垂直速度分别为
(7)
式中vx——种子脱离排种口水平分速度,m/s
vy——种子脱离排种口垂直分速度,m/s
种子从投种口落入种沟的运动时间t1满足
其中
h1=r(1-cosσ)
(8)
种子脱离排种口到落于种沟的位移为
S1=vxt1-rsinσ
(9)
穴施肥装置在K点开始施肥,忽略肥料间作用力和空气阻力,肥料脱离排肥口水平和垂直速度分别为
(10)
肥料脱离排肥口落入地面的运动时间t2满足
(11)
肥料脱离排肥口到落于肥沟上的位移为
S2=v′xt2
(12)
排种口与排肥口的水平距离为b,种子脱离排种口与肥料脱离排肥口的时间间隔为t3,若σ=0°,则h1=0,肥料与种子落于沟底的水平距离为
a=S1-S2+b+vmt3
(13)
当t3=0时,肥料与种子落于沟底的最小水平距离为
amin=S1-S2+b
(14)
穴施肥控制系统可以通过控制t3的值,实现肥料施用位置的有效调节。
玉米免耕播种每穴施肥量要综合分析考虑多种因素,包括种子特性、土壤条件、产量水平以及栽培方式等。每穴施肥量由外槽轮式排肥器和穴施肥装置联合控制,由槽轮旋转将肥料通过导肥管送入鸭嘴阀中,外槽轮式排肥器槽轮每转的排肥量为
q1=fqLγz
(15)
式中fq——每个凹槽截面积,cm2
L——槽轮有效工作长度,cm
γ——肥料密度,g/cm3
z——凹槽个数
若每穴施肥量为q,则
(16)
式中n——排肥轴转速,r/min
3.2 控制系统设计
系统采用台达DVP-SX2系列PLC控制器,控制量主要包括2个100 kHz高速脉冲输出接口,控制排种器和穴施肥控制装置的驱动电动机,2个模拟输出接口控制外槽轮式排肥器和传送带驱动电动机;输入量主要包括2个100 kHz高速脉冲输入接口,检测排种器和穴施肥控制装置的工作速度,1个10 kHz高速脉冲输入接口,检测穴播籽粒信号。控制系统硬件配置如表1所示。
系统软件在台达WPLSoft 2.37平台采用梯形图开发控制程序,在DOPSoft 2.00.04平台开发监控系统程序。主要功能包括穴施肥工作参数录入、工作实时参数监测、穴施肥控制算法、驱动电动机控制、电动机速度检测、播种检测等。系统程序流程:系统初始化;穴施肥工作参数设定;穴施肥位置和穴施肥量控制算法;等待播种籽粒信号,当检测到播种籽粒信号,启动穴施肥控制装置,进行精量穴施肥[31-33]。
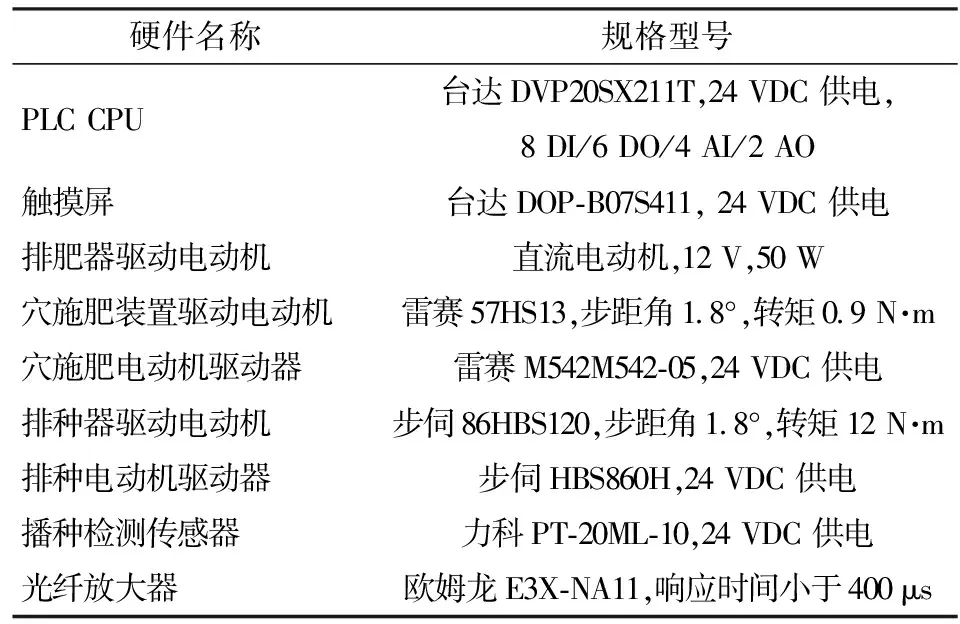
表1 控制系统硬件配置Tab.1 Hardware configuration of control system
4 台架试验
4.1 试验材料
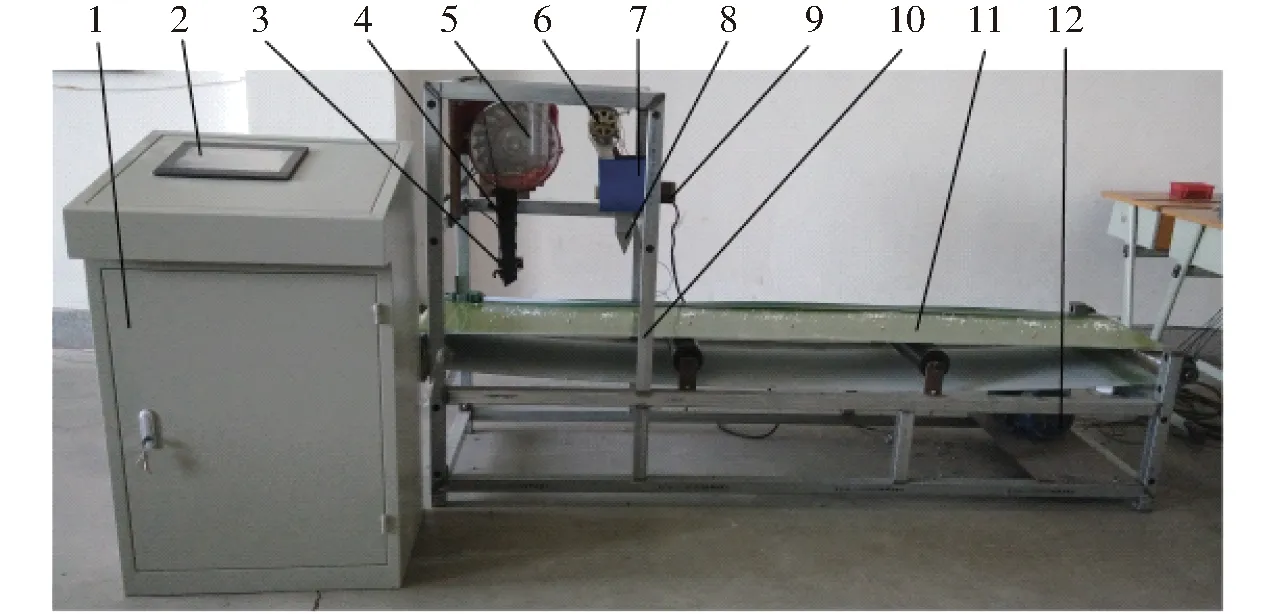
图8 穴施肥性能试验台Fig.8 Performance test bench of hole fertilization1.电气控制柜 2.监控系统 3.播种检测传感器 4.导种管 5.勺轮式排种器 6.外槽轮式排肥器 7.穴施肥控制装置 8.鸭嘴阀 9.穴施肥装置驱动电动机 10.台架 11.传送带 12.传送带驱动电动机
为检验穴施肥控制系统性能和工作可靠性,进行了台架试验。试验台为自主研制的播种机性能检测试验装置,如图8所示。包括台架、传送带、电气控制系统、监控系统、传送带驱动电动机、勺轮式精密排种器、排种器驱动电动机、外槽轮式排肥器、穴施肥控制装置、穴施肥装置驱动电动机、播种检测传感器等。输送带上贴有强力网状双面胶带,以增加种子和肥料落入传送带时的摩擦力,防止种子和肥料弹跳,影响穴施肥性能检测。选用郑单958玉米种子和吉农4号肥料作为穴施肥控制系统性能检测试验样本。
4.2 试验方法
将排种器、排肥器和穴施肥控制装置固定在试验台上,通过控制传送带速度模拟田间作业。排种器投种角度σ=0°,排种口与传送带距离H1=10 cm,排种盘半径12 cm,肥料与种子垂直距离h2=10 cm,排肥口与传送带距离H2为15~30 cm,排种口与排肥口的水平距离为b=20 cm,穴施肥控制系统设定每穴肥料中心点与种子水平距离a=5 cm,排肥器轮外径d=6.8 cm,凹槽截面积0.188 cm2,槽轮有效工作长度L=1.5 cm,凹槽个数9个,排肥器每转排肥量3.1 g。播种实际粒距为L2,每穴施肥量q2=5 g,每穴肥料中心点的距离为L3,每穴肥料实际质量为q3,则穴距精度
(17)
穴施肥量精度
(18)
按照试验要求,系统运行后,穴播种子和肥料以一定的间距落到运行的传送带上,停机后,人工测量穴播施肥量和穴播位置,检测穴施肥控制系统性能。
4.3 试验结果与分析
播种机行进速度vm、鸭嘴阀旋转角度Ω=2β、排肥口安装高度是影响穴施肥性能的重要参数,将其作为试验的3个因素,根据试验装置特点,连杆lCD取30 mm,各因素变化范围:播种机行进速度为3~7 km/h,鸭嘴阀旋转角为26.56°~37.71°,排肥口安装高度为15~30 cm。每次试验测量4 m施肥数据,每次试验重复3次取平均值作为试验指标。试验因素编码如表2所示。
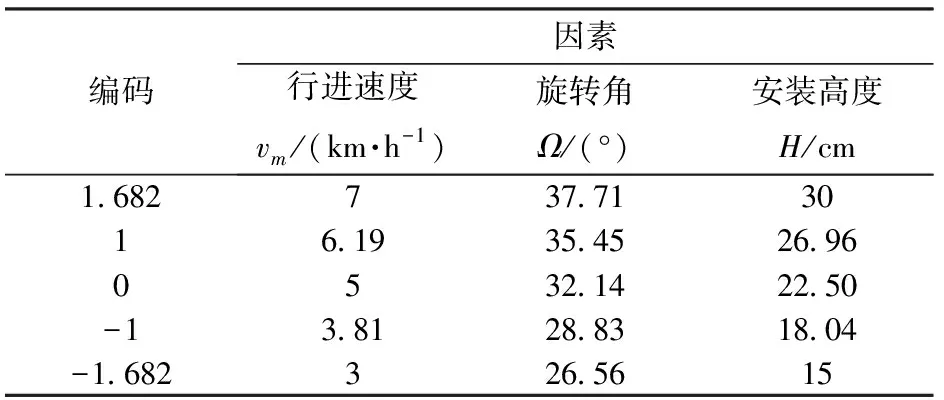
表2 因素编码Tab.2 Coding for factors
根据试验设计原理进行三元二次回归正交旋转组合设计试验,试验方案与结果如表3所示。A、B、C为因素编码值。
通过Design-Expert 8.0.6软件对试验结果进行回归分析,确定试验指标在不同因素影响下的变化规律。穴距精度和穴施肥量精度回归方程显著性分析结果如表4所示。
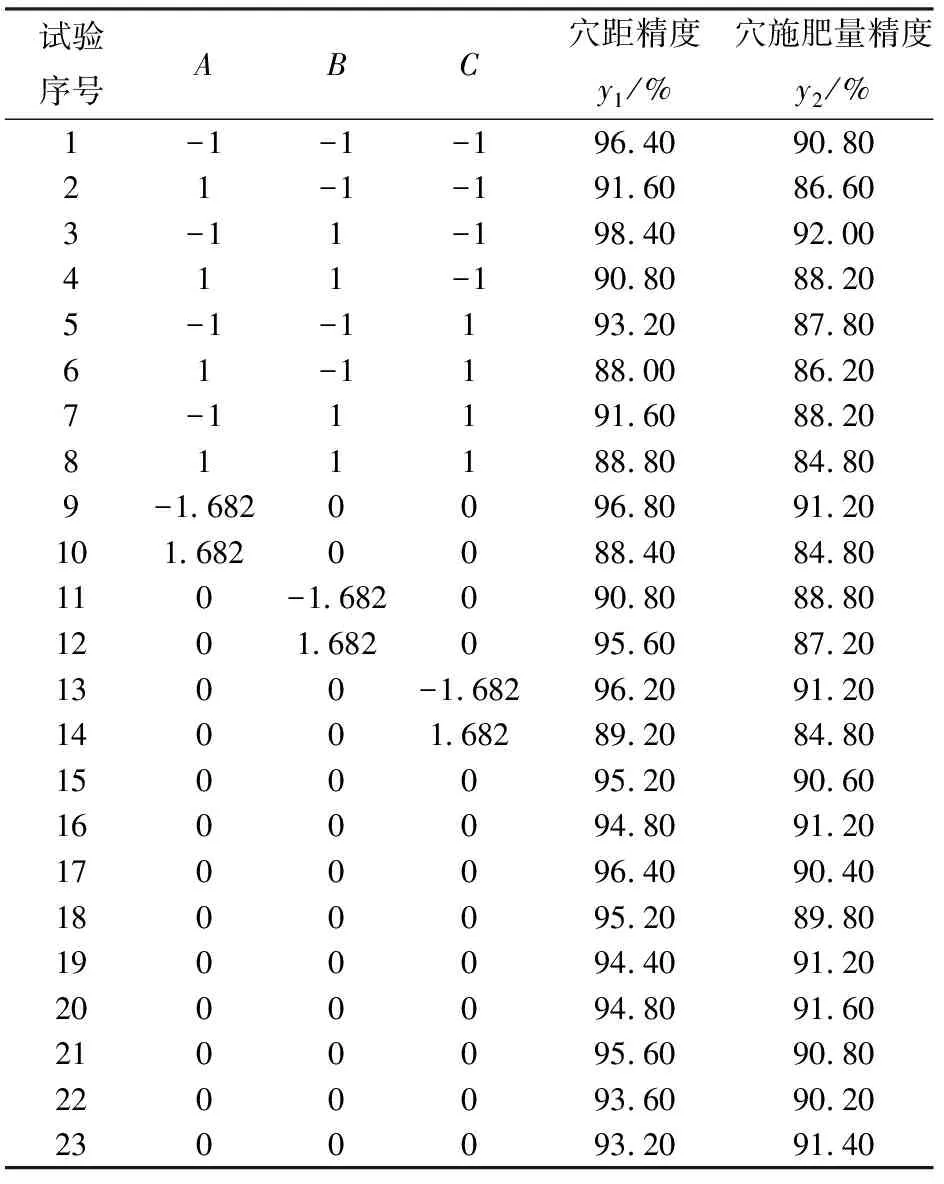
表3 试验方案与结果Tab.3 Test scheme and results

表4 方差分析Tab.4 Variance analysis
由方差分析结果可知,失拟项P值大于0.05,说明回归方程拟合较好,模型P值小于0.000 1,说明方程显著,与试验数据拟合较好。进而得出相应的回归方程为

(19)

(20)
为直观分析试验指标与各因素之间的关系,运用Design-Expert 8.0.6软件得到穴距精度和穴施肥量精度响应曲面,如图9所示。
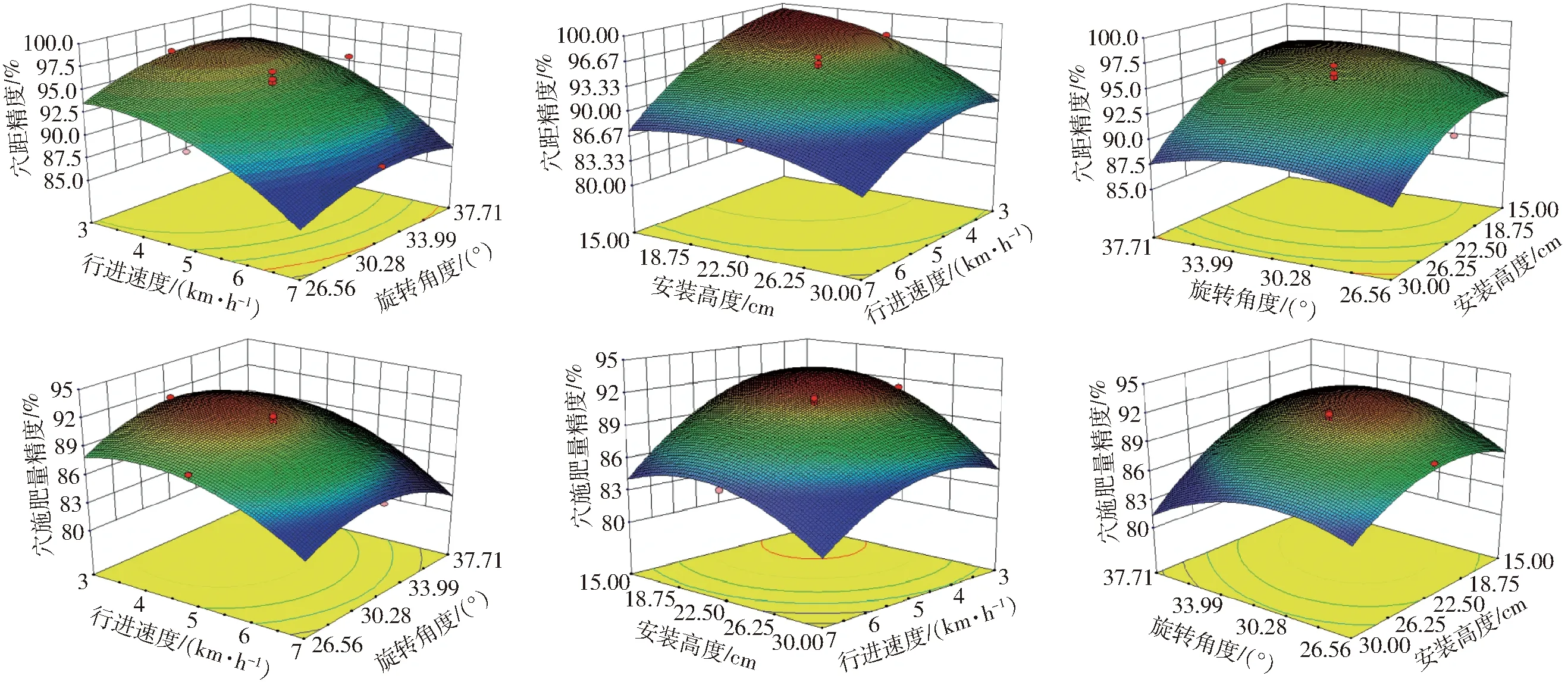
图9 试验因素对各指标的影响Fig.9 Influences of experimental factors on indicators
根据上述回归方程和响应曲面可知,播种机行进速度、鸭嘴阀旋转角度和安装高度存在交互作用。穴距精度和穴施肥量精度均受行进速度和安装高度影响最为显著,其交互作用影响较大,为主要因素;旋转角度对系统影响较小,与其他两个因素之间存在一定的交互作用。
4.4 参数优化
为发挥穴施肥控制系统最佳工作性能,对试验因素进行优化设计。建立参数化数学模型,结合试验因素的实际工作情况,对穴距精度和穴施肥量精度的回归方程进行分析,得到其非线性规划的数学模型为
(21)
当播种机行进速度为7 km/h,旋转角为33.37°,安装高度为17.30 cm时,穴距精度和穴施肥量精度综合效果最优,分别为86.03%和84.60%。
5 田间试验

图10 田间试验Fig.10 Field test
为了验证穴施肥控制装置田间工作性能和可靠性,2017年4月和10月在辽宁省新民市公主屯镇马屯村玉米田地进行了田间试验,如图10所示。穴施肥控制装置安装在2BMGYF-2型免耕精密播种机上,拆除覆土轮,便于测量穴施肥装置的穴距,播种开沟深度40~70 mm,施肥开沟深度种下30 mm,与播种开沟器侧向距离50 mm。鸭嘴阀顶端与缺口圆盘底端距离17.30 cm,鸭嘴阀旋转角33.37°,排种器投种角度σ=0°,排种口与种沟距离H1=30 cm,排种口与排肥口的水平距离为b=30 cm。试验设备包括SM-2型高精度土壤水分测量仪(澳作生态仪器有限公司),测量范围0.05~0.6 m3/m3,在0~40℃时精度为±0.05 m3/m3;SC900型土壤紧实度测量仪(澳作生态仪器有限公司),量程0~45 cm、0~7 000 kPa,最大加载95 kg,分辨率2.5 cm,35 kPa,质量1.25 kg;卷尺、皮尺、直尺、蓄电池。测得试验留茬地的土壤含水率的平均值为19.16%,15 cm深土壤紧实度均值为1 370 kPa。试验选用郑单958玉米种子和洋丰复合肥料,播种粒距为25 cm,每穴施肥量q2=10 g,分别在播种机行进速度3、5、7 km/h下进行9次试验,每次试验测试距离为10 m,测量播种粒距和施肥穴距,计算出相邻两穴种子平均粒距和肥料平均穴距,每穴施肥量为施肥总量与施肥总穴数的比值。
穴施肥试验数据取平均值,试验验证结果如表5所示。

表5 试验验证结果Tab.5 Verification of testing result
可见,在最优的穴施肥装置参数作用下,速度在3~7 km/h时,穴施肥性能受系统参数变化影响较小,穴施肥精度随着播种机行进速度的增加略有下降,穴距精度不小于84.76%,穴施肥量精度不小于87.20%。
6 结论
(1)为实现玉米精量穴施肥农业技术要求,设计了穴施肥控制装置。根据其结构特点和安装要求,对穴施肥装置的结构参数进行了优化设计,使其能够在3~7 km/h速度下实现精准精量穴施肥功能,满足免耕播种施肥的农艺要求。
(2)应用EDEM软件对鸭嘴阀的成穴性能进行了仿真试验。试验在播种速度3、5、7 km/h时,肥料平均穴距分别为24.9、23.79、23.28 cm,表明在播种速度3~7 km/h时,鸭嘴阀成穴性能较好,随着播种机速度的增加,成穴性能逐渐减弱。
(3)设计了穴施肥控制算法。穴施肥控制系统通过控制种子脱离排种口与肥料脱离排肥口的时间间隔t3,实现对肥料与种子水平距离a的适时调节,保证穴施肥位置的精确性。通过控制排肥轴转速和鸭嘴阀的开合频率,实现穴施肥量调节,保证穴施肥量的精度。
(4)进行穴施肥装置性能优化试验,运用Design-Expert 8.0.6软件对试验结果进行分析,利用响应面法对回归方程数学模型进行多因素优化,得到播种机行进速度7 km/h时最优参数为:鸭嘴阀旋转角为33.37°,安装高度为17.30 cm。田间试验表明,在速度3~7 km/h范围内,鸭嘴阀旋转角为33.37°,安装高度为17.30 cm,穴施肥控制装置的穴距精度不小于84.76%,穴施肥量精度不小于87.20%。
