下肢外骨骼运动学与ADAMS仿真分析
2018-07-27曹宇飞
曹宇飞 樊 军
(新疆大学 机械工程学院,乌鲁木齐 830047)
当前,我国农业和工业生产过程中仍然存在很多的手工作业环节,工作量大、效率低下。因此,本文设计了一个3-DOF下肢外骨骼机构,对其运动学进行分析,然后通过控制跨步调整脚着地位置的方法,确保了机构的稳定性。最后通过ADAMS仿真,结果显示,本文建立的外骨骼机构稳定性良好,实现了助力目的,满足设计要求。
1 下肢外骨骼模型的构建
下肢外骨骼机构在工作时需具备负载能力大、强度大及仿人形运动等特点[1]。为了使下肢外骨骼穿戴方便及运动灵活,本文设计了一个具有3-DOF的下肢外骨骼机构,模型如图1所示[2]。
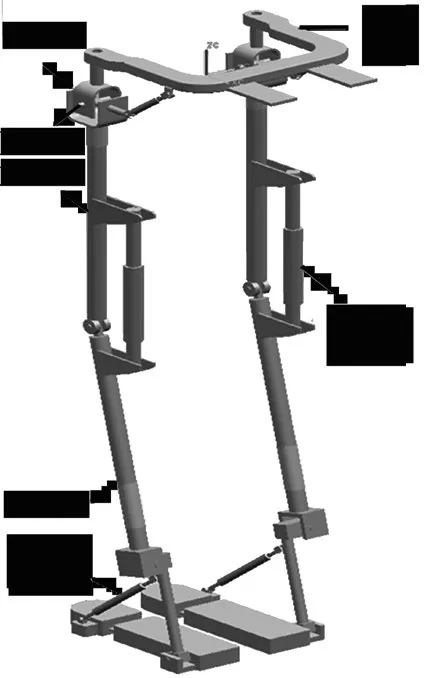
图1 下肢外骨骼机构设计模型
此机构主要由髋关节、膝关节、踝关节及足部等构成。该设计机构可以满足穿戴者仿照正常的步态行走运动,准确地模拟人体行走过程中的复杂耦合运动,可一定程度上保证行走的稳定性。
2 动力学建模
2.1 位置正反解分析
机构位置正解问题用指数积公式法来进行分析[3]。并联结构的正运动学公式可表示为:

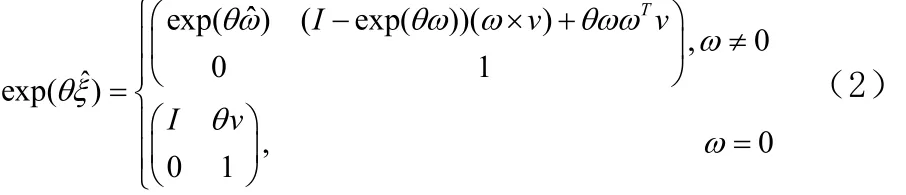
矩阵的指数形式表示为式(2):
根据式(2),可推出O3点的位置公式:

机器人的运动学反解问题指已知其末端运动执行器的位形,求此时机构的所有关节转角及位移的问题[4]。对于n自由度的开链机构,在式(1)两边均乘以(0),则可表达为:

2.2 机构的雅克比矩阵及其奇异性
˙
机构各个支链的伸缩速度表示为L ,末端运动执行器的广义速度表示为X,并且要求。机构的输入和输出的速度应当为,其中J=J2-1J1,J1表示逆雅克比矩阵,J2表示正雅克比矩阵[5]。
由以上可以发现,此机构J1的行列式不等于0。因此,下面基于J2来分析它的奇异位形。令det(J2)=0,可整理得:
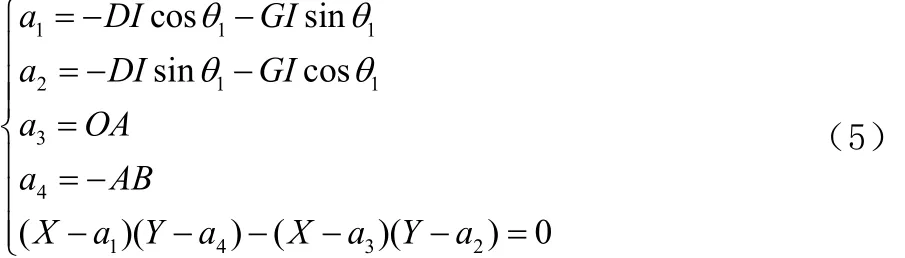
由式(5)可知,当a1=a3,a2=a4时,B点与H点重合,此处即为髋关节奇异位形处,即死点位置。
3 控制策略
本文通过调整跨步腿落脚点的位置以改变支撑多边形,使其在运动时可以跨过奇异位置,实现下肢外骨骼系统的运动连贯性和稳定性,如图2所示。
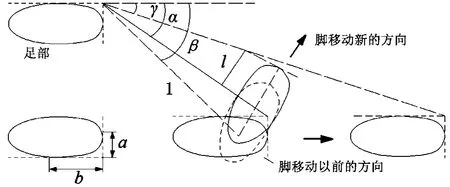
图2 外骨骼系统脚着地位置的确定
根据式(6)可得脚的移动方向改变角αf,即奇异位置时欧拉角的逆运动角。

根据式(7)可得脚所移动的距离lf。

在因腿部的额外移动导致的重心变化量可忽略不计的情况下,当下肢外骨骼系统位于新的落脚位置时,系统将处于稳定状态。
4 人-机系统联合负重仿真
在腰部支架上添加一个重40kg的重物作为负载块,并认为负载的重量完全作用在外骨骼上,构建了人-机系统联合负重模型,如图3所示。
图3 人-机系统联合负重行走模型
4.1 仿真过程
运动学仿真过程如下:记录仿真过程中的髋、膝和踝关节力矩变化;建立垂直于地面的支撑,在外骨骼足部底面与底面之间建立“固固相连”类型的接触,并将重力加速度的大小和方向设定好;运行仿真,时间为2s,步数为50步。
4.2 仿真结果
如图4所示,通过与人体负重时,各关节的力矩进行对比可以发现,在穿戴上外骨骼后进行负重运动,人体下肢各关节的力矩与之前相比有明显的减小,这说明本文所建立的下肢外骨骼具有助力特性而且效果突出,尤其是在髋关节以及膝关节处更为明显。
5 结语
本文首先建立了一个3-DOF下肢外骨骼的模型,对其运动学进行了分析,然后利用跨步调整脚着地位置的控制策略方法,确保机构的稳定性。最后通过ADAMS仿真,对比穿戴外骨骼前后人体各关节力矩,结果显示,本文建立的下肢外骨骼机构稳定性良好,实现了助力目的,满足设计要求。
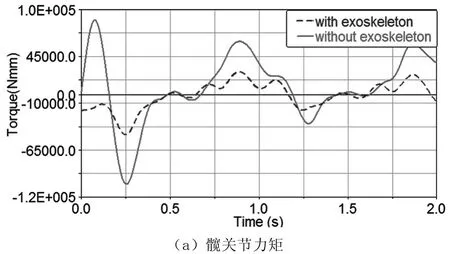
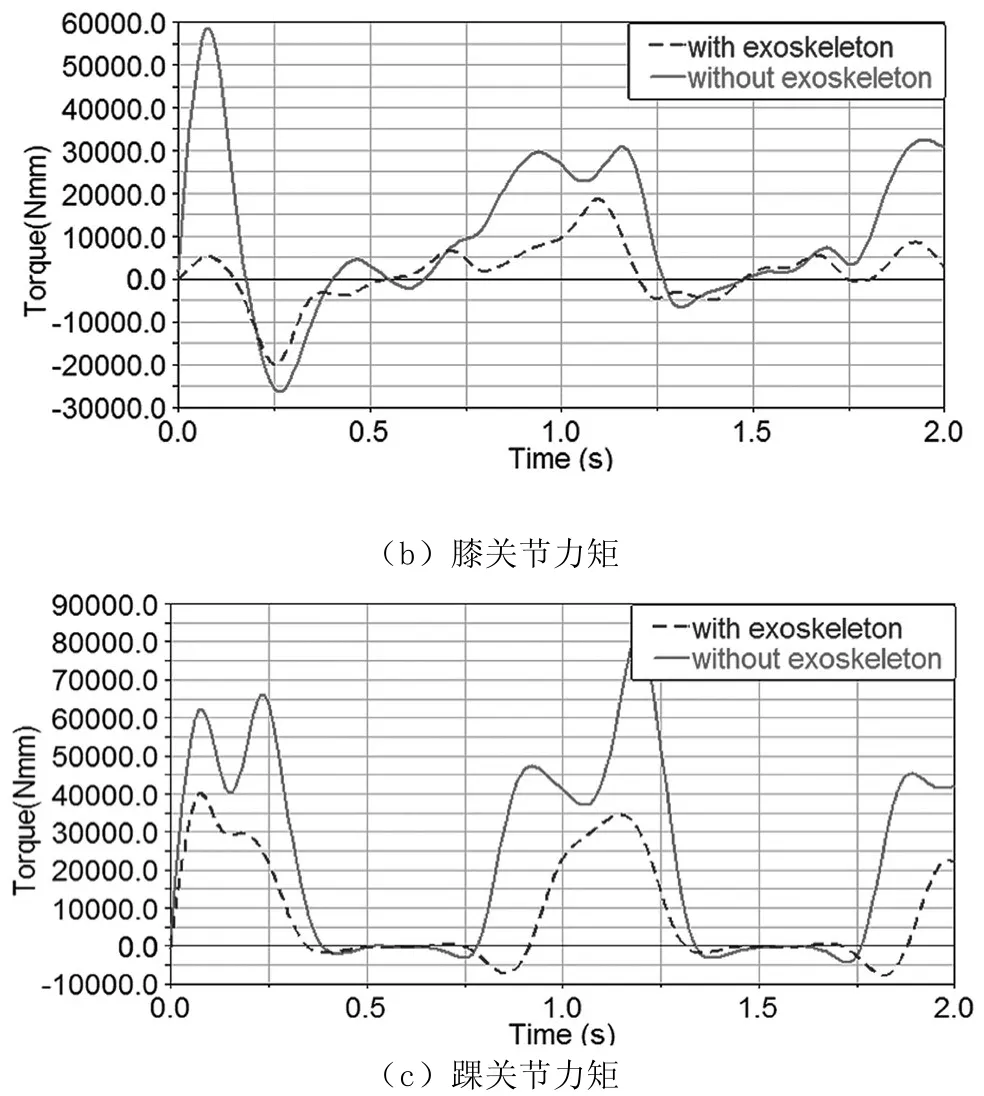
图4 穿戴外骨骼前后人体各关节力矩对比曲线
