步态康复训练装置的减重技术研究现状
2018-07-27陶娟
陶 娟
(国家知识产权局 专利局 专利审查协作江苏中心,苏州 215000)
人体下肢可以简化为一个四刚体模型,下肢关节运动是指髋关节、膝关节、踝关节的屈、伸,髋关节的收、展、旋内、旋外、环转以及膝关节的旋内、旋外。髋关节、膝关节、踝关节可简化为三个铰链,股骨、胫骨和足骨可以分别绕着各自的铰链转动。步态康复装置是对下肢行走障碍的患者进行助力康复的康复设备,早期的步态康复训练装置的结构和功能都比较简单,后来逐渐发展为具有不同智能化程度的产品。按照结构,步态康复器械可以分为卧式、坐式、穿戴式和减重式。
1 步态康复训练装置减重技术分析研究
1.1 国外研究进展
步态康复训练装置近年来发展较快,在国外发展较早,中国发展较晚。步态康复训练装置源于悬吊式疗法,1958年Margaret H和Margaret HSR出版了专专著《康复治疗中的悬吊疗法》,提出了减重训练的康复疗法,如图1所示,但是当时并未得到重视。1989年,加拿大学者Visintin等将减重训练应用到神经瘫痪患者康复训练中,掀起了减重训练应用的热潮。
1999年,瑞士Hocoma医疗器械公司和苏黎世Balgrist医学院康复中心联合开发名为Lokomat的康复器械[1]。Lokomat康复器械是下肢康复训练机器人中比较具有代表性的产品之一,如图2所示,其主要由减重支持系统、跑步系统和外骨骼机械腿构成,通过减重衣减重,使得患者保持身体直立,防止倾倒;外骨骼机械腿通过可调节的固定带与患者下肢相连,在训练时由驱动电机驱动关节,进而带动人腿在跑步机上行走,使患者下肢模拟正常步行训练。目前,Lokomat研发团队不断改进控制策略,其已经实现了产品化。
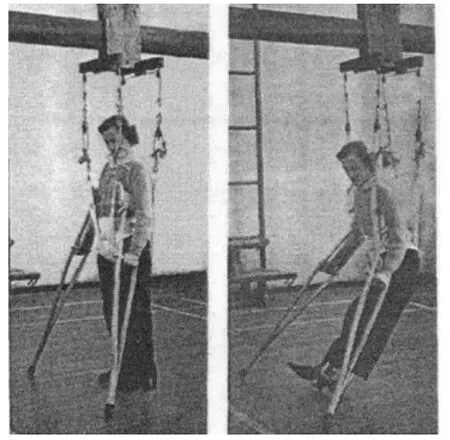
图1 Margaret H 悬吊疗法

图2 Lokomat机器人
德国弗朗霍费尔(Fraunhofer IPK)自动化机器人研究中心和柏林慈善医科大学的Henning等共同开发出绳索牵引式步态康复器械Haptic Walker,其由减重装置和姿态控制装置组成。瑞士浩康股份公司研究了一种用于步态训练的设备,其重量支撑系统,用以使人能够经由臂构造而至少局部地悬吊在上方。
美国Delaware大学在外骨骼上安装角度传感器、力矩传感器和肌力传感器,监测下肢运动时的关节力矩和关键肌肉力量。韩国PSME-N公司研究了一种步态训练装置,包括跑步台、减重框架、上身支撑结构,通过计算机控制并分析训练。日本UYKO-N公司研究了电动控制的步态训练装置,包括电机、滑轮组件和牵引绳,采用牵引绳带动减重。
1.2 国内研究进展
国内,清华大学、上海大学、浙江大学、哈尔滨工业大学等高校和一些医疗器械制造公司对步态康复训练装置开展了研究。清华大学属于研究比较早也是研究比较深入的,于 2000年 研 究 了 GRTS(Gait Rehabilitation Training Symem),GRTS由减重系统、外骨骼机械腿和电动跑台组成,电驱动安装于机械腿的膝关节和髋关节,采用关节直接驱动,从而控制髋、膝电机的协调运转实现步态模拟。
哈尔滨工程大学于2002年开始研究下肢康复训练机器人,其设计类似于德国绳索牵引式步态康复器械Haptic Walker,由减重装置和姿态控制装置组成。通过一套人体站立重力平衡系统和计算机控制下的步态与姿态协调机构的有序动作,患者在站立情况下可以模拟正常人的步伐规律,自主地操作控制台上的键盘进行肌肉锻炼和行走功能训练。
浙江大学于2007年研究了一种多体位外骨骼下肢康复训练机器人,包括机座、护栏、悬吊系统、外骨骼训练装置和计算机控制系统。该机器人通过对国际通用的Brunnstrom训练方法进行分析,结合对脑卒中病人瘫痪下肢的“物理疗法(PT)和作业疗法(OT)法,旨在满足脑卒中病人不同阶段、不同体位的康复训练要求。最近,浙江大学还针对悬吊减重的问题进行了研究,结合虚拟现实技术,避免悬吊减重的操作问题。
上海大学研究了悬挂式下肢康复器械,平衡器包括减重力产生机构、支架、电动绞车、钢丝绳、滑轮、力传感器、吊带、跑步机和控制系统。上海理工大学还研究出了基于电刺激的气囊减重下肢训练装置,包括由底板、两立柱和两扶手组成的机架,机架后部连接有箱体。
其他高校和研究所,如上海交通大学、南开大学、天津大学、上海健康医学院、中国矿业大学、合肥工业大学、北京理工大学、四川理工学院、南京理工大学和中国科学院自动化研究所,也进行了步态康复训练装置的相关研究。
此外,医疗器械公司也加入了减重式步态康复器械的研究,常州市钱璟康复器材有限公司于2008年研究了一种手动减重步态训练器。芜湖天人智能机械有限公司于2015年研究了一种可变轨迹减重康复器械,包括机架、上肢训练机构以及下肢训练机构。广州科安康复专用设备有限公司于2016年研发了一种单驱动仿生步态康复训练机器人系统,包括医用跑台、减重器、机器人支撑部件、仿生步态机器人和控制系统。其他如国家康复辅具研究中心、南京康龙威科技实业有限公司、昆山市工业技术研究院有限责任公司、广州市三甲医疗信息产业有限公司、安阳市翔宇医疗设备有限责任公司、沈阳艾克申机器人技术开发有限责任公司、杭州福祉医疗器械有限公司、广州一康医疗设备实业有限公司、广西盈锐智能机械有限公司以及上海璟和技创机器人有限公司等公司也进行了关于步态康复训练装置的研究。
2 步态康复训练装置的减重技术分析
步态康复训练装置一般具有减重结构、跑台结构和步态控制结构。跑台结构一般为椭圆机结构和跑步机结构。减重是关系到患者使用舒适度的关键技术,目前现有的减重系统有以下几种。
2.1 悬吊减重
悬吊减重,包括吊架式和牵引式。吊架式悬吊减重是最先研发也是最常见的减重方式,如专利申请号为JP2006138846A、KR20150173515A的吊架式悬吊减重。申请号为CN201610011011的吊架式悬吊减重装置如图3所示,减重支撑系统通过绑带等部件与人体上半身相连,对康复训练对象进行部分减重。再如,申请号为CN200910048312.9的一种基于电机控制的主动减重平台,通过电机驱动丝杠来牵引钢丝绳,带动吊带为患者或训练者卸去自身的重量,使得患者或训练者能够在恒定减重力下进行训练。牵引式悬吊减重采用牵引绳进行减重,如申请号为KR20120018423A的步态康复训练系统的牵引式减重。申请号为CN201310038722的牵引式悬吊减重如图4所示,其具有电机、滑轮组件和牵引绳,采用牵引绳带动减重。
2.2 配重式减重
以图2中Lokomat减重步行训练康复器械为代表的被动配重块减重支撑系统,在垂直方向高度可调。以Lokomat后续产品Lokolift为代表的被动弹簧减重支撑系统,其采用一个被动弹簧和主动闭环控制装置,消除了配重块的惯性冲击,维持恒定的减重力。
2.3 气囊式减重
申请号为JP2012167475A、JP2012167469A的训练装置具有气囊腔室。申请号为CN201510249704的气压减重步态监控训练系统如图5所示,气囊进口连接在支撑架后部分上,跑台位于气囊内部,跑台下面设置有压力传感器,用于对跑台上的压力进行测量,计算机发送控制指令给充气子系统和跑台控制子系统,并与步态评估和步态矫正子系统进行数据指令的传输。再如,申请号为CN201410005174、CN201410005465的气囊减重下肢训练装置,其气囊支架可沿两立柱上下移动,气囊的下部与底板封接并包围步行器,如图6所示。
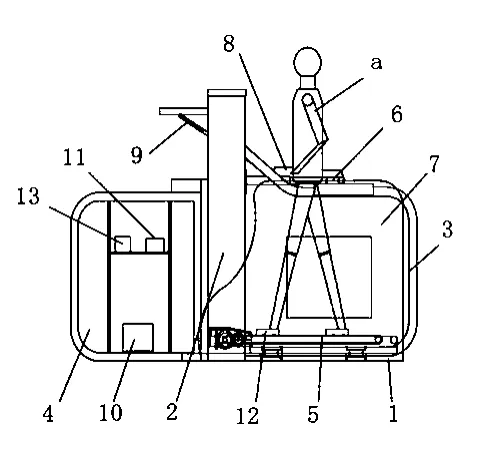
图6 气囊式减重装置二
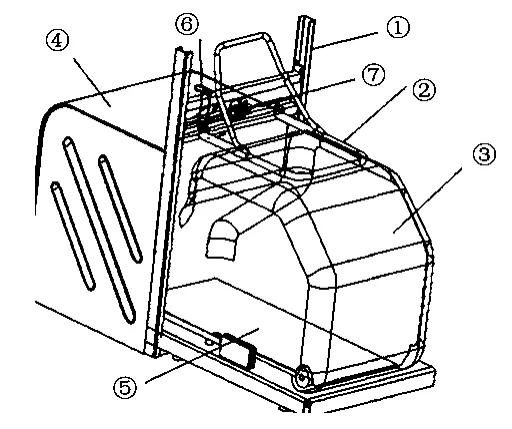
图5 气囊式减重装置一
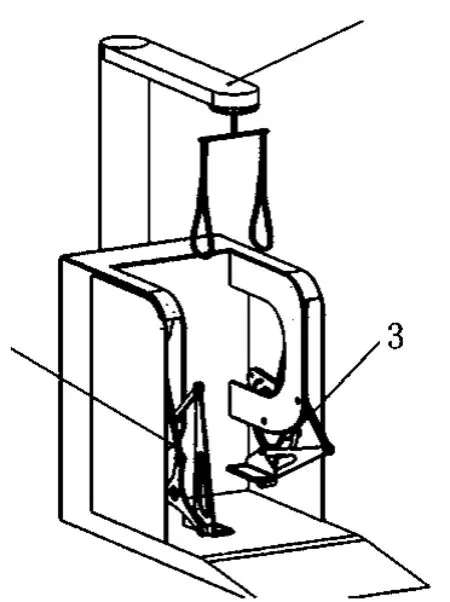
图3 吊架式悬吊减重
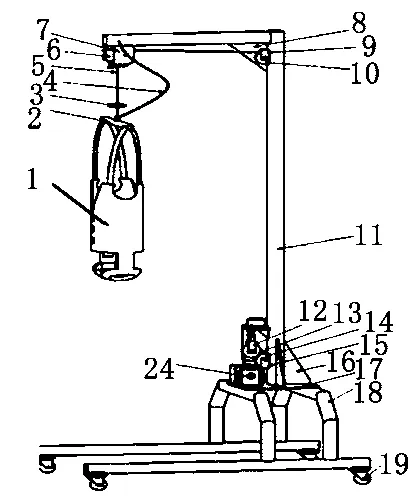
图4 牵引式悬吊减重
2.4 支撑减重
申请号为CN201410321345的康复步行运动器械如图7所示,其支撑杆减重装置包括座椅和第一支撑件,座椅与第一支撑件的近端连接,第一支撑件的远端与支撑机构连接,第一支撑件可在支撑机构上上下滑动;支撑机构竖直固定在步行控制装置的框架上;步行控制装置包括左右分离的左履带和右履带,左履带和右履带的运行速度可被分别控制。在进行下肢康复训练时,该装置减轻了患者的身体负担,提升了康复效果。
2.5 吊带和支撑配合减重
吊带和支撑杆结合减重不仅可以在垂直方向上对患者进行减重,还能够在其他部位对患者进行限位和减重,如申请号为US201213646368A的医疗用康复器械、申请号为JP2004117867的安全保护步态训练装置。申请号为CN200910048312的主动减重步行训练装置,通过吊带连接到钢丝绳上,钢丝绳的一端装有绞盘,可以按照患者身高调节钢丝绳的长度,另一端连在减重机构上,用于提供减重力,减重力的大小可以根据医生的要求给定。申请号为CN201510070183的减重装置如图8所示,主要包括固定支撑架、减重控制台、电动升降杆和减重吊带。
2.6 浮力和悬吊配合减重
申请号为CN201510213414、CN201520271043的双重减重步态康复水疗训练系统如图9所示,其包括固定在地面上方的导轨,导轨上安装有可沿着所述导轨滑动的滑块,滑块连有接拉绳,拉绳的另一端连接有固定患者身体的吊带。导轨下方设有训练水池,患者在充满水的训练池中进行训练,水的浮力和吊带的拉力共同减轻了患者的重力。
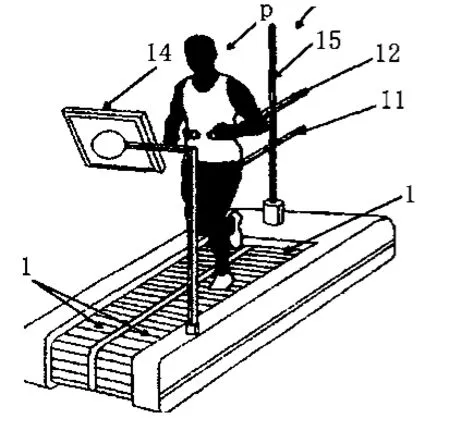
图7 支撑杆减重
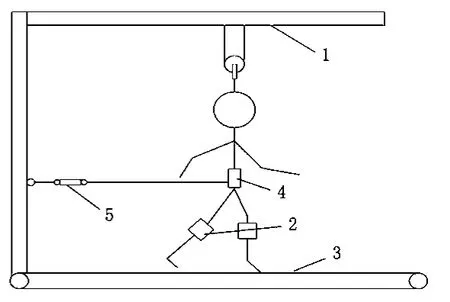
图8 吊带和支撑杆配合减重
2.7 气动与悬吊配合减重
申请号为CN201010515112.2的气动控制减重支撑系统,通过控制气动控制来控制吊绳的张力恒定。申请号为CN200820159942的气动减重训练架如图10所示,具有龙门架与静音空压机。龙门架由底架、立柱及横梁组成,在立柱中设置有伸缩气缸。静音空压机的输气管与伸缩气缸连接,伸缩气缸的活塞杆头端连接有拉绳,拉绳从立柱中穿行,途经折角处转向滑轮,最后从横梁中向下引出,并在下端挂设吊梁,吊梁下挂接承重吊兜。
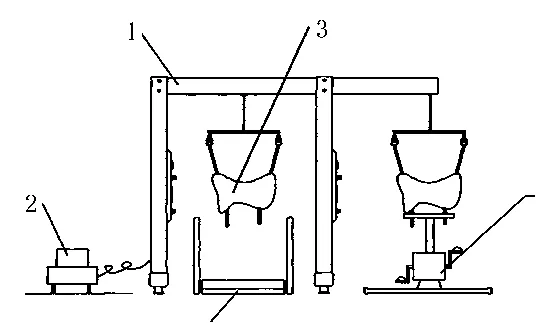
图10 气动与悬吊共同减重
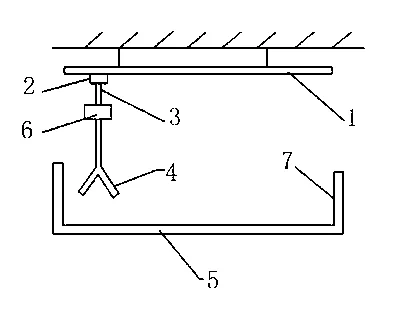
图9 浮力和悬吊共同减重
2.8 部分减重
申请号为CN200610012012的具有重心调整功能的部分减重支持装置如图11所示,其能自动地连续在线调节减重设置,适合不同的患者或同一患者的不同康复阶段。重心在矢状面和水平面内的调节,符合正常人体步行的步态特征,为患者提供正确的步态模式。
2.9 智能减重
申请号为CN201410785391的下肢步态康复训练自适应减重机构,其测力传感器用于测量康复训练者对踏板施加的压力,计算机通过通信连接获取所测数据并与预设阈值比较,根据所测压力与预设阈值比较的结果控制电机旋转。电机通过联轴器带动丝杆转动,再通过配重下的螺母与丝杆的配合、配重上的通孔与导轨的配合,带动配重左右移动,实现配重模块重心变化,自适应配重平衡。申请号为CN201611001529的步态康复训练装置如图12所示,其步态模拟发生装置安装于康复平台的底部并位于智能减重装置下方,能实现主被动康复训练,用于脑瘫、中风等造成的步行障碍训练者的康复训练。
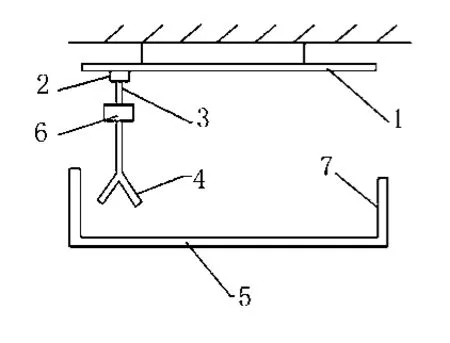
图11 部分减重支持装置
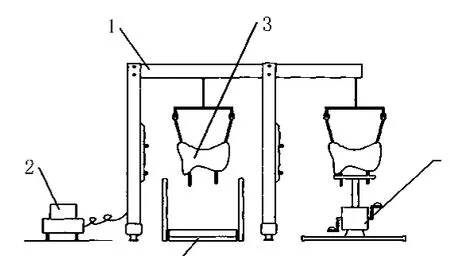
图12 智能减重装置
3 步态康复训练装置目前存在的问题
随着下肢步态康复训练越来越深入,人们在关节复杂训练、人体舒适度等方面对下肢步态康复器械提出了更高的要求。
虽然步态康复训练机器人训练的是人体的下肢腿部,但是髋关节、盆骨等也受到限制,影响训练的舒适度和训练效果。因此,需要结合髋关节、盆骨等进行分析,以提高步态康复训练装置训练的舒适度[2]。
目前,步态康复训练装置在医院等使用并不广泛,并且老年人出行不便。因此,需要开发远程医疗康复控制系统以及家庭式的步态康复训练装置,使得医生在医院提供指导,患者在家庭中即可自主训练,以提升训练的便捷性。
4 结语
减重式步态康复器械的研究已经渐有规模,随着新材料应用越来越广泛、传感器技术的改进和人机交互的改进,未来康复器械将朝着人性化和智能化方向发展,相信未来步态康复器械可以更加舒适。
