多模式共驾智能车行驶安全性评估研究*
2018-07-26严利鑫秦伶巧熊钰冰
严利鑫 秦伶巧 熊钰冰 李 凯
(1.华东交通大学交通运输与物流学院 南昌 330013;2.威斯康星大学-麦迪逊分校交通运营和安全实验室 威斯康星 53705;3.南昌城投房地产开发有限公司 南昌 330013)
0 引 言
多模式协同驾驶是智能车发展过程中必须经历的一个重要阶段。在该阶段,驾驶人和机器共享对车辆的操作权限,当系统检测到潜在的危险时,通过进行一系列的安全辅助措施实现车辆的安全行驶[1]。同时,智能车驾驶模式的切换是一个复杂的过程,对驾驶人状态、车辆运动状态、交通流状态及周边车辆运行状态等多方面都会产生较大影响[2]。由于驾驶人和被控车辆是驾驶模式切换影响的直接承受体[3],所以模式切换的安全性将对智能车的顺利接管产生直接影响。
考虑到交通环境复杂性、系统可靠性及经济性等原因,实现车辆全自动驾驶还有较长的一段发展时间。但是在现有条件下针对特定场景的自动驾驶是完全可行的。Sheng等[4]利用驾驶人面部信息和转向盘转角实现对驾驶疲劳的识别,并基于此对驾驶人疲劳条件下智能车辆从人工驾驶到自动驾驶的切换进行了研究。此外还通过融合多源信息提出了基于疲劳识别的智能车辆驾驶模式切换框架模型,模拟实验结果表明该框架模型能够有效的提高驾驶人疲劳状态下车辆行驶安全性。Zeeb等[5]采用仿真实验分析了智能辅助驾驶系统切换时间与切换提示之间的相互影响关系,并在此基础上对不同驾驶风格驾驶人切换反应能力进行了统计分析。Nilsson等[6]通过融合驾驶人的控制能力和车辆当前状态构建由自动驾驶切换到手动驾驶的安全评估模型。此外,传统的安全辅助驾驶系统主要通过2种方式来进行车辆的紧急避险。一种方式为声音或者其他方式进行报警,这种方式多单纯依靠车速或者车间距等进行安全状态判断,如以色列的Mobileye system是通过融合车道偏离距离和当前车速对车辆横向状态进行估计。当出现车道偏离或者占道行驶时,系统通过发出“滴滴滴”的报警音对驾驶人进行警示[7]。另一种方式为通过自动控制车辆的制动踏板来达到安全行驶的目的,如现有的一些车辆安全辅助驾驶系统通过对车头时距进行检测,当车头时距小于设定的阈值时,系统通过自动减速来进行紧急避险[8]。
以上成果分别从预警和控制的角度对行驶安全性进行了研究,但是针对的研究主体仍然为安全辅助驾驶系统。随着自动驾驶相关技术的快速发展,车辆具备自动驾驶功能将是一个必然的发展趋势。但是现阶段全自动驾驶的普及与现实的交通条件还存在较大的差距,采用人机共驾驾驶系统对车辆行驶安全性及交通通行效率将有很大的帮助。
考虑到行驶安全性及现有法规等因素,笔者采用驾驶模拟器来开展实验并完成数据采集,通过查阅文献资料并分析获取不同模式下行驶安全性影响特征指标,采用多统计学方法对原始数据进行统计分析,同时采用贝叶斯网络构建不同驾驶模式下安全性评价模型。该项研究能够为人机共驾智能车模式选择提供理论依据和技术支持,为智能车的快速发展奠定基础。
1 实验设计
1.1 实验设备
模拟实验系统采用的是由威斯康辛大学—麦迪逊分校土木与环境工程学院研发的汽车驾驶模拟器。该模拟器的座舱是由1辆福特小轿车改装而成,车体下方加装了动感平台,能够模拟与实际驾驶一致的运动效果,另外该汽车驾驶模拟器能够开展包括人工驾驶、警示辅助驾驶和自动驾驶3类不同驾驶模式在内的模拟驾驶实验。其中警示辅助驾驶模式是采用鸣警笛的方式对驾驶人提供警示,当系统检测到需要对驾驶人提供预警时,内置计算机通过播放警笛音提示驾驶人改变当前的驾驶方式。而自动驾驶模式则是采用简易模拟器紧急接管的方式实现的。当系统检测到需要进行驾驶接管的时候,工作人员采用接管系统及时对车辆进行接管。采用该种方式来进行接管的优势是能够更加真实平稳的反映出驾驶人在遭遇自动接管时的状态而驾驶人注意力数据的采集则使用眼动仪完成。见图1。
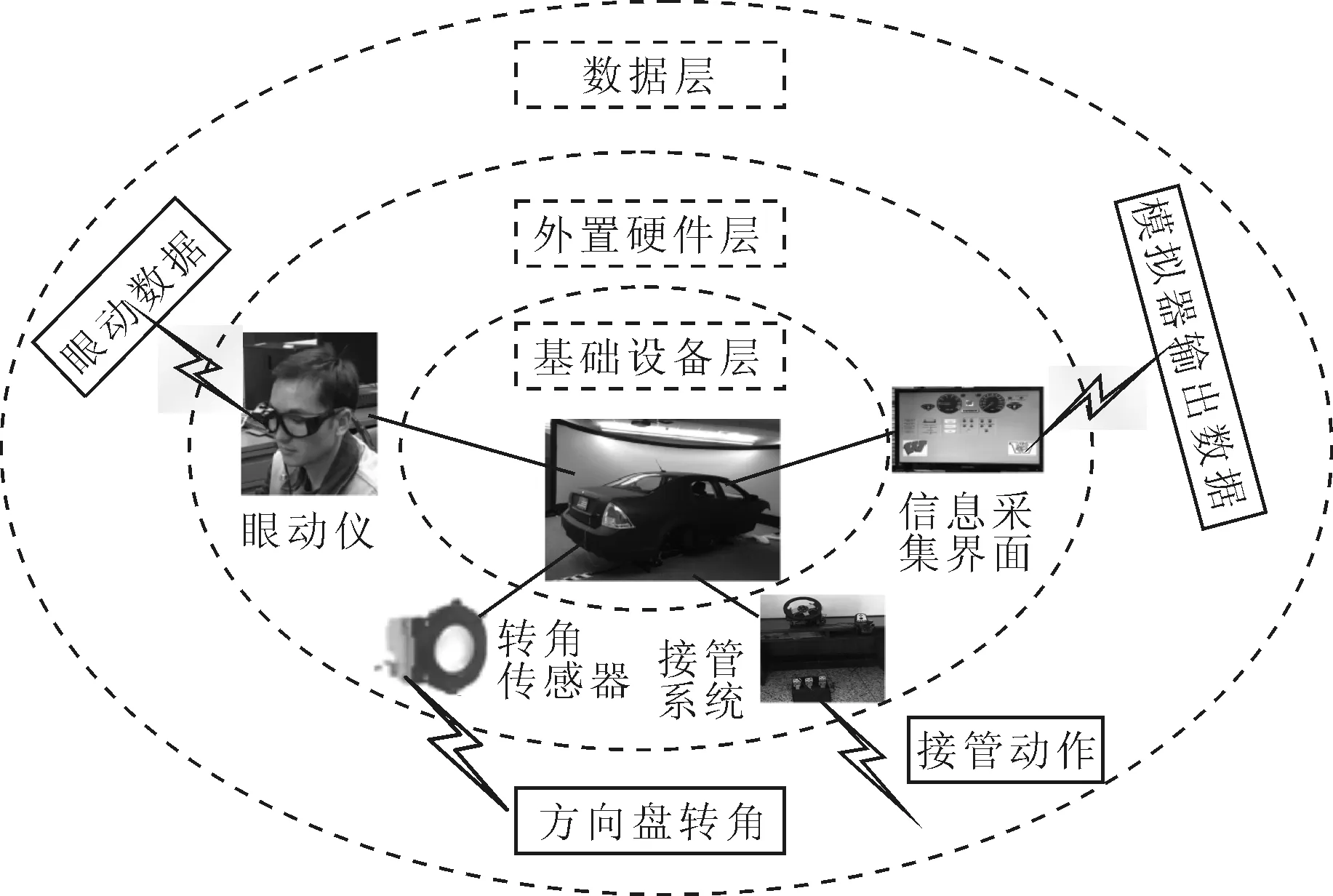
图1 智能车模拟实验系统Fig.1 The simulating system of intelligent vehicle
1.2 实验对象和场景
被试人员选择。5名职业驾驶人及10名在校大学生参加了实验,被试的平均年龄为31.47岁(标准差为6.79岁);其中女性3名,男性12名,平均驾龄为7.53年(标准差为4.40年)。被试完成实验后均可获得少量酬劳。
实验场景。本实验主要是为了验证不同驾驶模式切换对行驶安全性的影响,所以要求所设计的交通场景尽量简单,降低其它因素的干扰。实验场景包括静态交通环境和动态交通事件2个部分。①静态交通环境。晴天,路面干燥,道路类型为双向4车道城市道路,道路为南方某一城市的实际道路,全长10 km,且基本为平直路段,道路两侧为商业楼,机动车道于非机动车道之间有绿化带分隔,沿途交通标志标牌及路边设施按照道路设计规范进行设计。②动态交通事件。主车以高于60 km/h车速行驶,驾驶中会随机出现低速行驶的车辆或者障碍物,需驾驶人采用避让或者制动灯驾驶操作。其中一个典型的遭遇场景可描述为:当主车行驶至特定路段时前方突然出现干扰车辆,且该车辆保持低速行驶,另一车道也有车辆与前方干扰车辆并行,主车需通过制动来避免发生碰撞。
1.3 实验过程
每个驾驶人需在同一路段内完成3次模拟驾驶实验。第1次为全人工驾驶,即在模拟驾驶过程中,车辆完全由被试操作,不提供任何警示或者辅助驾驶。第2次为特定场景下的警示辅助驾驶,即在特殊交通场景下,通过进行警示或者报警,提示驾驶人规避潜在的风险。第3次为自动辅助驾驶,即在极端危险情况下,通过接管驾驶人控制权来实现车辆的安全行驶。值得注意的是,驾驶人在实验过程中需完成双任务。首先,驾驶人需完成指定路段的驾驶;然后,在车辆行驶过程中,驾驶人需完成给定的手机导航设置任务。该任务的设计原因是为了增加驾驶险态出现的可能性,进而增加模式切换发生的概率。整个驾驶过程将采用摄像机进行记录,以便于进行后期实验数据的分析处理。
2 数据指标的选取与分析
2.1 数据指标的选取
车辆行驶过程中,行车安全性主要由驾驶状态感知、决策判断和驾驶操作3个方面因素决定,在特定行驶场景下,驾驶人首先需要对当前的交通环境信息进行状态感知。根据经验做出决策判断,进而采取相应的操作动作。而这一系列的操作动作将以车辆的行驶状态的改变而得到体现。其关联关系模型见图2[9]。

图2 行车安全性关联框架模型Fig.2 Traffic safety related framework model
驾驶人的状态感知是通过听觉和视觉实现对交通事件和周边道路交通环境的信息过获取过程。研究表明,90%以上的交通信息是驾驶人通过视觉观察获取的,而注视点分配和注视的时效性往往对感知结果有着决定性的作用[10]。所以,本研究选取驾驶人注视点分配和注视的时效性作为表征驾驶人状态感知的特征指标。
驾驶人的决策判断水平一般都是由驾驶人经验决定的。而相关研究表明,驾龄和驾驶里程能够很大程度上反映驾驶人的实际驾驶水平,包括其在特定场景下的判断能力和应急处置水平[11]。基于此,本研究选取驾驶人驾龄和驾驶里程这2个指标从决策判断层对行车安全性进行评价。
驾驶人的操作动作是状态感知和决策判断的结果,是改变当前车辆行驶状态的直接催化剂。而操作动作主要体现为对转向盘、加速踏板、制动踏板、离合踏板、挡位、指示灯等装置的控制方面。如果从操作效果来划分的话,可以将车辆的控制主要包括横向和纵向2个方面,其中横向操作安全性评价主要体现在转向盘控制上,而纵向操作安全性可以体现在制动踏板的控制上[12]。因此,本研究采用制动踏板深度和转向盘变化率2个指标从操作动作层面实现对不同驾驶模式下车辆行驶的安全性进行评价。
通过对上述指标的获取,能够分别从状态感知、决策判断和操作动作3个大方面实现对行车安全性的评价和分析。进而为多模式协同共驾智能车行驶安全性的提高奠定基础。
2.2 数据指标的获取与分析
2.2.1 不同驾驶模式下注视特性分析
注视特性不仅能够反映驾驶人的驾驶习惯,而且能够为车辆行驶安全性评价提供重要依据。所以,首先对驾驶人在人工驾驶、人工驾驶+警示辅助驾驶、人工驾驶+警示辅助驾驶+自动驾驶模式下的注视特性进行统计分析,如图3所示,为15组数据样本在不同驾驶模式下的注视点分布情况。其中A表示车辆只能进行人工驾驶,A+B表示车辆包含人工驾驶模式和警示辅助驾驶模式,A+B+C表示车辆包含了人工驾驶、警示辅助模式和自动驾驶3种模式。
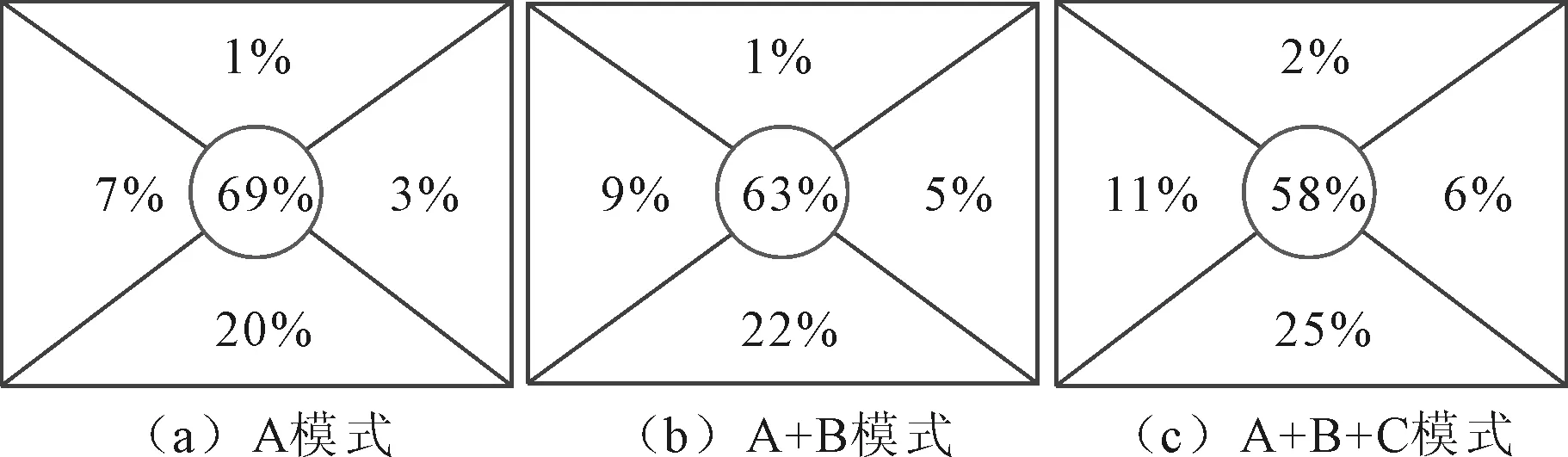
图3 不同驾驶模式下注视特性分析Fig.3 the gaze characteristics in different driving modes
从图3可知,在3类不同模式情况下,驾驶人的注视点分布情况出现一定差异性。三者之间注视特性的差异主要集中在道路中心区域和车内装置区域,相较于其它2种模式,在A+B+C模式下,驾驶人对道路区域注视的次数最少,而对车内装置区域(手机、收音机等装置)的注视点分配的比率更高。在A模式下,驾驶人往往会更加关注前方道路的情况,对其他区域的关注相对而言较少。
2.2.2 不同驾驶模式下操作特性分析
实验中制动踏板深度是通过拉力传感器的量程变化来获取,为统计方便,将制动踏板深度值按每秒取均值的方法进行数据收集并绘制成图像,进行直观的比较。图4为实验中一组数据样本的制动踏板深度随时间变化及统计结果。

图4 不同驾驶模式下制动变化特性分析Fig.4 Braking characteristics in different driving modes
图4中的数据特征变化特征表明,该名驾驶人在3种不同的驾驶模式组合条件下,制动踏板的使用频率和踏板深度存在较大的差异性。由图4(a)~(c)可知,当车辆只具有人工驾驶模式时,其制动的频率和制动时制动踏板深度要高于其它2种模式组合;车辆具备人工驾驶模式和警示辅助驾驶模式时制动踏板深度相对来说较小,而当车辆具备3种驾驶模式时,采取刹车操作的次数最少。由图4(d)可以直观的发现:该驾驶人在3类不同驾驶模式实验过程中制动的次数分别为36,43和25。由此可见,当车辆具备人工驾驶、警示辅助驾驶和自动驾驶3种模式时,驾驶人制动次数将减少。图5为不同驾驶模式下转向盘转角变化特性分析。

图5 不同驾驶模式下转向盘转角变化特性分析Fig.5 Steering wheel Angle characteristics in different driving modes
从图5可知,转向盘转角在驾驶人处于B模式下变化比较平缓,其变化的最大值小于20°,而在A模式下出现转向盘转角值大于30°的次数明显多于其它2种驾驶模式组合。根据视频和驾驶过程自我描述可知,转向盘转角出现剧烈变化的原因是驾驶人在进行其它任务时,忽略了对当前交通环境的监测。在A模式下,驾驶人只能通过剧烈转向来规避事故的发生。C模式组合方式下,当自动切换的条件被触发时,车辆本身就已经处于危险状态中,自动驾驶模式有时可能需采用极端的方式来避免交通事故的发生。而在B模式下,由于能够提供辅助预警,所以绝大多数的危险情况警示系统都会向驾驶提供警示,所以剧烈的驾驶操作出现的可能性较小。
为了能够进一步分析3类不同驾驶模式下的车辆行驶安全性,采用交通事故起数、车辆熄火次数、驶出道路次数、紧急制动次数和紧急转向次数5项指标进行评价。其中交通事故数、车辆熄火次数和驶出道路次数能够直接通过在驾驶模拟器的数据采集系统中获取,而紧急制动和紧急转向则利用式(1)和式(2)计算得出。
Δd=dt-dt-1
(1)
Δθ=θt-θt-1
(2)
式中:dt为当前时刻制动踏板深度,dt-1为前一时刻制动踏板深度;Δd为当前时刻制动踏板深度与前一时刻制动踏板深度的差值;θt为当前时刻转向盘转角值;θt-1为前一时刻转向盘转角值;Δθ为当前时刻转向盘转角与前一时刻转向盘转角的差值。通过多次试验测试,在城市平直路段行驶过程中,当Δd值大于等于0.5时,则认为该制动行为为紧急制动;当Δθ值大于等于20°时,则认为该转向行为为紧急转向。基于上述计算公式和统计分析得出不同驾驶模式下5项指标的变化结果见图6。
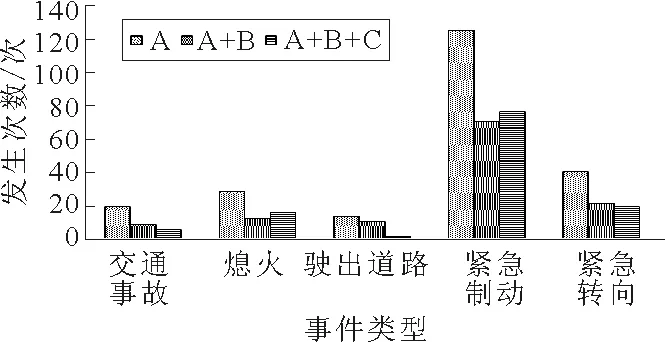
图6 不同驾驶模式下不同交通事件出现的次数Fig.6 The occurance of traffic event in different driving modes
根据图6可知,采用人工驾驶+警示辅助驾驶+自动驾驶模式(A+B+C)能够有效的降低交通事故、驶出道路、紧急转向等事件次数的发生,而该模式下熄火次数和紧急制动次数略高于A+B模式时。究其原因是进行自动驾驶接管往往是出现极端危险的情况,此时更容易进行的操作就是紧急制动。而A+B模式下只提供警示,不会进行紧急制动等辅助,所以A+B+C模式下出现紧急制动的次数高于A+B模式下。此外,因为在进行自动驾驶接管时,由于操作方式发生了较大变化,剧烈的制动或者其它操作容易导致手动档车辆熄火。总而言之,采用A+B+C驾驶模式对车辆进行控制能够有效的提高车辆行驶的安全性。
3 行驶安全性评估模型的构建
3.1 贝叶斯网络基本理论
贝叶斯网络模型的构建主要包括3个步骤:①确定变量集和变量域;②确定贝叶斯网络的结构;③确定节点的先验概率和条件概率。其中变量集和变量域的确定可通过查阅文献和经验获得。这样贝叶斯网络模型构建的核心问题就转变为网络结构的确定和条件概率的计算[13-14]。
3.1.1 基于互信息的贝叶斯网络结构学习
假设训练集D为完整数据集,其中节点Ai和其父节点之间的关系为独立的,则贝叶斯网络结构可以按照图7的流程图进行确定。
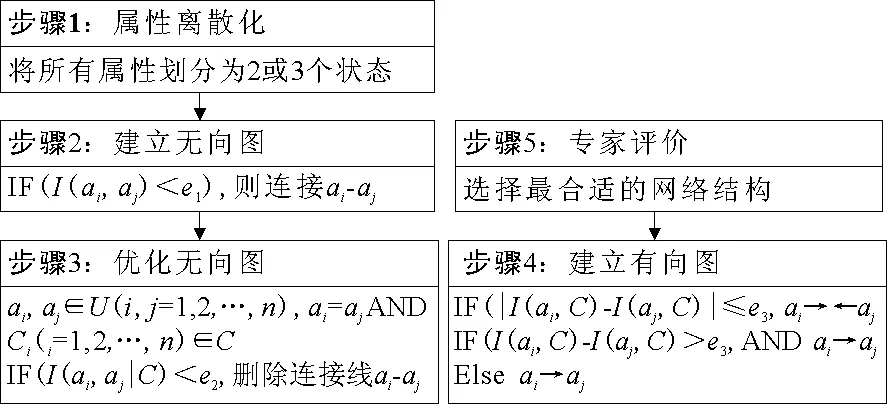
图7 贝叶斯网络结构学习方法Fig.7 The structure of Bayesian Networks
3.1.2 条件概率计算方法
根据传统的贝叶斯概率公式,可得到优化后的贝叶斯公式。
(3)
考虑到每个变量都包含多个不同的状态,例如父节点A包含n个状态{a1,a2,…,an},而子节点B包含m个状态{b1,b2,…,bn}。所以,A和B的条件概率为
p(a|b)=
(4)
由于变量A和B之间的关系为独立的,则边缘概率能够采用式(5)进行求解。
(5)
假设行驶安全状态为am,它拥有2个父节点,感知水平和判断水平,其中感知水平状态为bi,判断水平状态为bj,则
p(bi,am,bj)=p(bi)p(am|bi,am)p(bj)
(6)
当整个网络中的输入变量值确定后,网络中其它节点的值也能够随之确定,那么,可通过构建的贝叶斯网络计算特殊状态下所选择目标节点的概率[15-16]。同时,贝叶斯网络方法能够随着专家数据和历史数据的更新和添加对网络中的条件关系进行更新。
3.2 行驶安全性评估模型的构建
3.2.1 网络节点的选取
行驶安全性主要是由行驶过程中驾驶人的感知水平、判断水平和决策动作3个方面的因素决定的。其中,感知水平主要是通过驾驶人对存在风险源的注视特性进行评价的,包括注视点分配和注视时效性两个观测指标。判断水平是由驾驶人经验水平决定的,其评价指标包括驾龄和驾驶里程。决策动作则主要是通过横向操作和纵向操作两方面来体现,可用踏板和转向盘的变化来评估[14]。各指标的具体含义及节点间的关联性见表1。

表1 节点变量标识表Tab.1 Node variable identification table
表1所设计的10个变量将全部用于行驶安全性评估的建模研究中。根据前人研究结果和数据调查,对所设计的变量的状态等级进行了划分。其中“注视点分配”、“注视时效性”、“驾龄”、“驾驶里程“、”制动踏板深度”、“转向盘变化率”可根据其数据特征进行划分。其他变量的状态等级根据逻辑关系进行划分。
3.2.2 网络结构分析
本研究以Hugin作为建模的软件平台。,行驶安全性评估贝叶斯网络模型利用得出的10个变量作为网络节点,以“行驶安全性”为输出子节点,综合考虑专家经验和历史文献数据进行贝叶斯网络模型的构建,见图8。

图8 行驶安全性评估贝叶斯网络模型结构Fig.8 The structure of safety evaluation model
3.2.3 建模结果分析
通过利用模拟实验所采集的数据,采用式(5)和式(6)对贝叶斯网络中的边缘概率和条件概率进行计算,得到模型中驾驶状态判断为危险时,其相应节点节点的概率分布情况见图9。
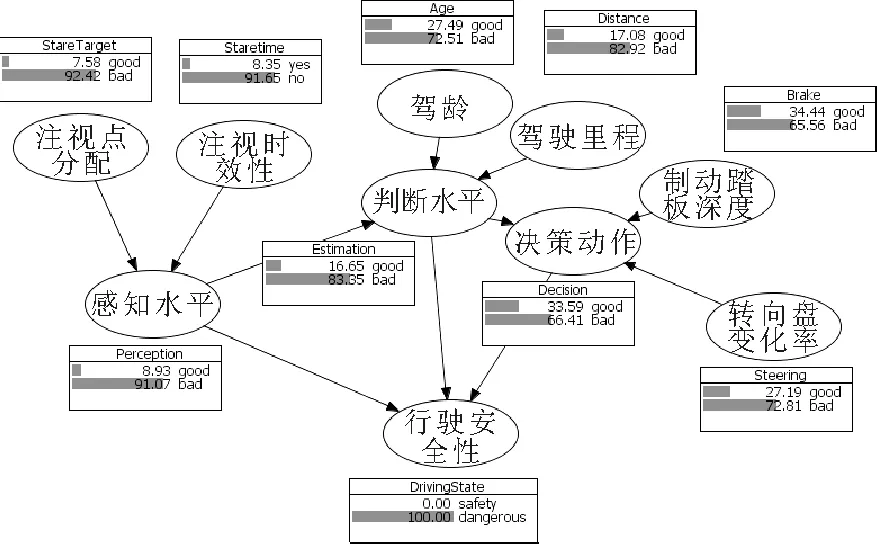
图9 当驾驶状态为危险状态时的节点概率分布Fig.9 Node probability distribution while in danger
笔者采用敏感性分析来检验模型构建的有效性和模型中各参数的关联关系。其中,输入变量与目标变量之间的敏感性采用行为敏感性方法,而网络节点参数的敏感性则可用于验证父节点条件概率的变化对子节点参数变化的影响,进而对所构建贝叶斯网络模型的合理性和可靠性进行验证[15-16]。经计算分析得出网络中各节点之间的敏感性关系如图10所示,并计算得出“危险驾驶状态”的关联变量的敏感性指数的平均绝对值见表2。
由图10和表2可知,注视时效性、注视点分配、感知水平和驾驶里程对行驶安全性有着重要的影响,这与前人研究中得出的结论相匹配。在驾驶过程中尤其是模拟驾驶实验过程中,能够实时的观察到存在的危险源对行驶安全性有着巨大的影响。同时,驾驶人经验的不同也是导致最终是否发生危险驾驶的一个重要因素,而考虑到中国的实际国情,采用驾驶里程和驾龄结合对驾驶经验进行定义也是非常有必要的[17]。
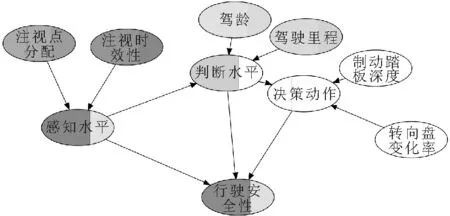
图10 行驶安全性评价模型变量间敏感性分析Fig.10 Snesitivity analysis of safety evaluation model
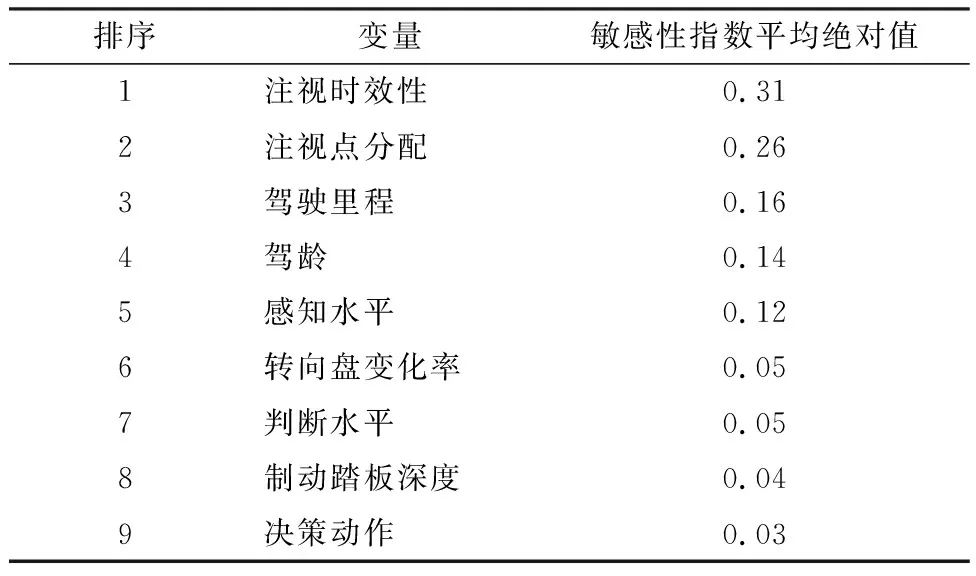
排序变量敏感性指数平均绝对值1注视时效性0.312注视点分配0.263驾驶里程0.164驾龄0.145感知水平0.126转向盘变化率0.057判断水平0.058制动踏板深度0.049决策动作0.03
4 结束语
基于驾驶模拟器研究了多模式智能车行驶安全性评估问题,通过对模拟驾驶过程中驾驶人注视特性和操作特性等多方面指标进行统计分析,最终得到能够表征多模式智能车安全性的关系变量。在此基础上,通过采用贝叶斯网络构建了多模式智能车行驶安全性评估模型,并且基于模型对不同影响因素对行驶安全性的敏感性进行了分析。研究结论能够为智能网联汽车及主动安全辅助驾驶提供理论和技术支持。然而,考虑到模拟驾驶与实际驾驶还存在一定的差异性,在未来的工作中,为了能够更加准确地实现对不同模式智能车行驶安全性评价,可通过开展实际驾驶实验采集更为全面的数据进一步丰富现有的结论。
