杭州地铁固定式架车机作业程序优化研究
2018-07-26缪君
缪 君
(杭州市地铁集团有限责任公司运营分公司,浙江杭州 310017)
0 引言
杭州地铁 2 号线固定式架车机在架电客车作业中,发现操作程序有可以改进的地方,具体表现为:在联控模式下架车,车体举升柱任意1个压力承载开关触碰到电客车架车点后,便使所有举升柱停止上升;其余没有承载的举升柱必须用单控模式手动上升至压力承载开关触碰电客车架车点后停止;而车体举升柱下降时,也必须手动降到所有车体举升柱同一高度后才能联控下降。这样的操作不仅费工费时效率低,还影响了电客车的维修进度。
1 固定式架车机用途
该设备主要用于地铁车辆转向架的更换,方便车辆整体和部件的拆装,能满足 6 辆编组列车在不解编状态下的同步架车作业。地下固定式架车机组在车辆不解编的情况下,可以对整列编组列车中所有转向架同时进行更换。因此,固定式架车机是地铁列车临修及架大修中必不可少的重要设备之一,如图 1 所示。

图1 架车机举升整列电客车
2 车体举升柱结构及工作原理
如图 2 所示,车体举升单元主要由车体举升柱、托头、减速机、丝杠螺母、导向箱、车体举升单元走行部分及润滑部分等组成。工作时减速机(带制动)驱动丝杠旋转,通过螺母带动举升柱升降。在举升柱的四周设有导向轮,确保举升柱能够垂直升降。
在每个车体举升单元上安装有 2 个同步脉冲传感器,用来进行同步数据的获得和判定。2 个传感器一个用来同步控制,另一个用来同步监控。
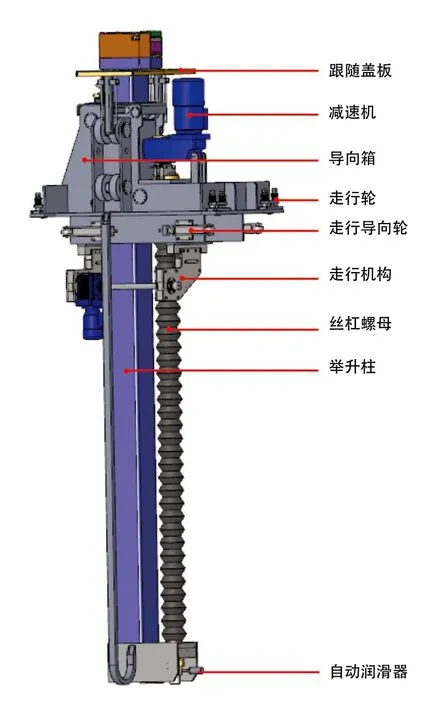
图2 车体举升单元组成
车体举升柱顶端承载面上设置压力承载开关,如图3 所示。车体举升柱上升到和车体上的抬车垫板接触并承载时(50 N 的压力即可触发压力承载开关),触发压力承载开关,车体举升单元自动停止上升,此时可避免车体举升柱上升时对车辆造成破坏。
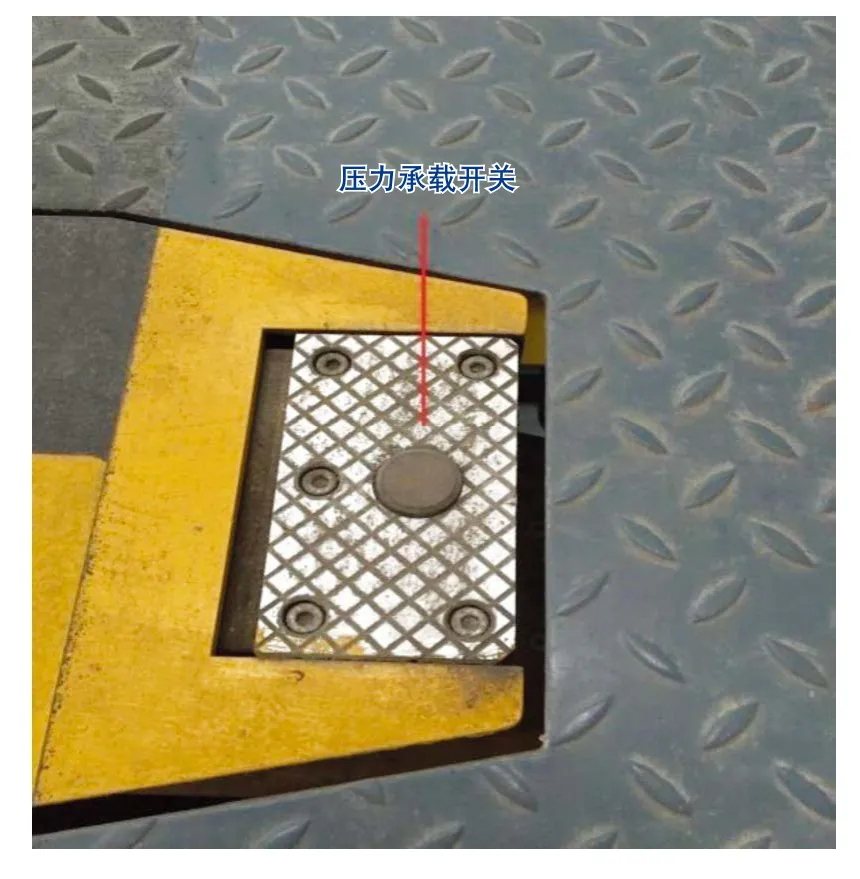
图3 车体举升柱压力承载开关
3 架车流程
固定式架车机架车时,首先需要选定架车的车体,转向架举升单元上升后,托住转向架连同车体举升到规定高度,然后车体举升单元上升至车体架车点后,整个架车机停止工作,这时由工人拆除转向架和车体的连接,然后转向架举升单元在工作人员的操作下托住转向架下降到地面。
转向架维修完成后推入到相对应的安装位置,由转向架举升单元托住转向架上升到距其安装位置约 200 mm 左右时停止,转向架和车体位置对正,由作业人员观察确认无误后(确保空气弹簧气嘴和车体正确对准)继续上升,直到车体举升单元不承载后,自动停止,连接转向架和车体,车体举升单元下降到 0 位,转向架举升单元托住转向架连同车体下降到 0 位。架车作业完毕后,转向架和车体举升单元全部沉入地下,整个作业完毕。
4 各举升柱不同步的原因及产生的后果
架车机群组升降不同步的主要原因:单个举升单元的驱动电机特性、负载、制造工艺、惯性不一致,且架车机电机无调速功能,故不能通过控制电机转速变化来保证丝杆在上升、下降过程中位移的一致性。
设备同步误差允许限值:任意 2 个车位车体举升柱之间高度差≤4 mm。
当可编程逻辑控制器(PLC)检测到任何不同步的情形超过 4 mm 时,系统会自动调整不同步的举升单元升降速度,直到达到规定的同步范围内。当压力加载限位值超过 20 mm 时,系统会自动停机,确保架车安全。
正因为以上同步误差的存在,导致在联控模式下,24 个举升柱中,总会存在某个举升柱的压力承载开关最先与车体接触的情况,而系统的压力加载限位值只有 20 mm,整列车的车体举升柱很容易超过这个限值,导致整列架车机保护性停止运行。
其余没有接触到车体的举升柱,必须用单控模式手动上升至压力承载开关触碰电客车架车点后停止,而车体举升柱下降时,也必须手动降到所有车体举升柱同一高度后才能联控下降。这样的操作不仅费工费时效率低,还影响电客车的维修进度。
5 解决方案及原理
如何破解以上问题、提高作业效率,需要从设备的控制程序上解决,使得经过优化的程序可以实现在联控模式下架车时,当任意一个车体举升单元的压力承载开关触碰到车体后,该举升单元会自动停止上升。此时所有举升柱停止上升,待操作人员依次确认各举升柱状态后,再按下联控上升确认按钮。其余没有接触到车体的举升单元会继续上升,直到所在车体举升柱的压力承载开关触碰到车体后,所有举升柱才停止顶升。
其原理为:各车体举升柱顶端承载面上都设置压力承载开关(压力传感器),当其中一个车体举升柱触碰到车体时,压力承载开关把力信号转化为电信号,通过电路反馈给程序控制器,程序控制器发出信号停止车体举升柱上升,剩下的车体举升柱重复同样的过程。
因此,要把原来程序控制器内关于压力传感器的反馈信号由串联关系转化为并联关系,使得其中一个压力传感器触发后不会影响其他压力传感器的触发,达到所有传感器都触发后才停止。
为此,邀请了固定式架车机的生产厂家技术人员一起优化固定式架车机的程序。经过调试后发现,固定式架车机逻辑控制关系匹配良好,满足架车要求。
除了调整架车机系统的逻辑控制关系外,还需要对举升单元的压力加载限位值进行调整,将压力加载限位值调整为 60 mm(同一转向架左右两侧举升单元的高度差)。
如图 4 所示,压力加载限位值调整前,车体宽度 L 为 2 800 mm,压力加载限位值 H 为 20 mm,计算角度α 的值可以得出车体的倾斜度:Tanα = H/L = 20 / 2 800 =0.007 1,α = 0.41°。
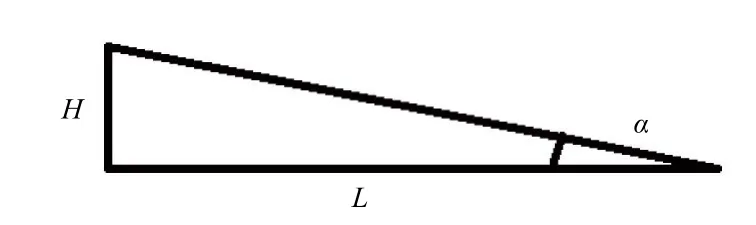
图4 车体倾斜度计算示意图
压力加载限位值调整后,车体宽度 L 为 2 800 mm,压力加载限位值 H 为 60 mm,计算角度 α 的值可以得出车体的倾斜度:Tanα = H / L = 60 / 2 800 = 0.021 4,α =1.23°。
由此可见修改前后,车体侧倾角度由 0.41°变化为1.23°,车体倾斜度基本可以忽略不计,可见该架车优化解决方案是切实可行的。
6 固定式架车机安全保护机制
架车机程序优化后,必然要考虑到安全保护是否到位。为保证车辆检修作业的安全,架车机设计了多重安全保护机制,主要内容如下:
(1)驱动电机采用制动电机;
(2)螺纹为可以自锁的梯形螺纹;
(3)设有上下限位及安全限位的双重限位开关;
(4)双螺母安全设置,在工作螺母下方设置安全螺母,工作螺母磨损或意外破损时,安全螺母起安全保护作用;
(5)设置螺母磨损检测开关,当工作螺母磨损到限后,控制系统自动报警提示;
(6)设置障碍物限位开关,当举升柱与螺母脱开时,系统自动报警并停机;
(7)螺母处设置自动润滑器,日常保养只需每隔 6个月注入润滑油即可;
(8)传动螺旋副螺旋升角为 3°17',满足自锁条件。
上述安全保护机制大大降低了被架车体的安全风险,使得架车过程可以安全有序进行,同时架车机出于安全考虑,对操作人员的操作也有一定的要求。
在联控模式下,某个举升柱的压力承载开关最先与车体接触后,整组架车机就会停止上升,待操作人员确认各举升柱压力承载开关的状态后,再操作架车机让其余举升单元与车体接触到位。
同时,在联控模式下升降车体,需由多名操作人员在车体两侧共同控制架车机的工作,架车机才能完成各项指定动作。当主控制台人员按下起升或下降的命令时,必须得到对面的确认命令,设备才能动作。按照起重设备的要求,该过程设计为点动控制方式,即操作中只要有任何一个人松手,架车机立即停机。
7 优化改进前后的效益对比
(1)优化改进前:固定式架车机顶升地铁列车单次需 30 min 左右,一个顶升单元传感器接触到车体后,其余顶升单元都将停止工作,需要由人工手动操作顶升至车体架车点,操作不仅费工、费时,而且效率低,间接影响了电客车的架修进度。
(2)优化改进后:固定式架车机顶升电客车单次只需 15 min 左右,比优化之前节省了人工手动操作顶升单元至车体架车点的时间,为电客车架大修节约架车时间,加快了电客车架大修的维修进度。
优化后,所需的操作人员数量也从 1 个主操人员、5 个副操人员减少为 1 个主操人员、2 个副操人员(兼按钮确认人员),为地铁公司节省了人力成本。
8 结论
固定式架车机作为地铁列车的重要检修设备,其高效性、可靠性及安全性直接关系到地铁列车架大修的生产组织。该项改进从目前的实际应用情况来看 ,效果良好,满足了现代城轨车辆整体同步架车的要求,同时通过程序更新优化,提高了检修效率、节约了检修成本,具有广阔的应用前景。
