机动车方向盘转向力-转向角检测仪测量结果不确定度评定
2018-07-26文昊
文 昊
(陕西省计量科学研究院,陕西 西安 710065)
1 概述
机动车方向盘转向力-转向角检测仪用来直接测量机动车方向盘的转向力及转动角度,达到判定机动车转向系统的工作状况,该状况直接影响机动车的安全性和操作性。将被校准机动车转向盘转向力转向角检测仪(以下简称转向仪)固定在专用转盘上,在转向仪外缘切线方向通过钢丝与力传感器相连接,用游标卡尺测量转向仪的半径。转向仪力矩测量点为40Nm,角度测量点为50°,测力传感器示值200N,转向仪半径0.2m(200mm)。
2 数学模型
2.1 转向仪力矩数学模型

式中:△—转向仪的力矩示值误差,单位Nm;
X—转向仪力矩的示值,单位Nm;
F—标准测力仪示值,单位N;
R—转向仪半径,单位m;
依方差,由不确定度传播率得:

2.2 转向仪角度数学模型

式中:△—转向仪的角度示值误差,单位°;
Y—转向仪的角度示值,单位°;
θ—标准角度示值,单位°;
依方差,由不确定度传播率得:

其中:
3 转向仪力矩输入量的标准不确定度评定
3.1 被校转向仪力矩示值引入的标准不确定度
被校转向仪示值引入的标准不确定度主要来源于转向仪的测量结果重复性及其数显量化误差。
3.1.1 被校转向仪力矩测量结果重复性引入的标准不确定度
测量结果重复性可以通过连续测量得到的测量列,采用A类方法进行评定。等精度重复测量10次,测量结果分别为39.8Nm、39.8 Nm、39.9 Nm、40.1 Nm、40.2 Nm、40.0 Nm、40.1 Nm、40.0 Nm、40.1 Nm、40.0 Nm,平均值40.00 Nm,用贝塞尔公式得单次测量实验标准差s(X):

实际测量时,在重复条件下连续测量3次,以3次测量的算术平均值作为测量结果,则可得标准不确定度为:

3.1.2 由被校转向仪数显量化误差引入的标准不确定度
被校转向仪的示值分辨力0.1Nm,半宽为0.1/2=0.05Nm,均匀分布。则其标准不确定度为:

重复性和数显量化误差取大者,取重复性引入的标准不确定度。
3.2 标准测力仪引入的标准不确定度
依据证书,测力传感器的最大允许误差为MPE±0.5%,200N时,其误差为200*0.5%=1N,均匀分布,则:

3.3 方向盘半径引入的标准不确定度
3.3.1 游标卡尺引入的标准不确定度
依据证书,游标卡尺的最大允许误差为MPE±0.05mm,即0.00005m,均匀分布,则:

3.3.2 方向盘半径测量引入的标准不确定度
估计用游标卡尺测量方向盘半径的读数误差为0.5mm,即0.0005m,均匀分布,则

3.3.3 方向盘半径引入的标准不确定度

4 转向仪角度输入量的标准不确定度评定
4.1 被校转向仪角度示值引入的标准不确定度
4.1.1 被校转向仪角度测量结果重复性引入的标准不确定度
测量结果重复性可以通过连续测量得到的测量列,采用A类方法进行评定。等精度重复测量10次,测量结果分别为52.1°、51.1°、51.3°、52.4°、52.5°、52.6°、51°、51.1°、52.3°、52.6°,平均值51.9°,用贝塞尔公式得单次测量实验标准差s(X):

实际测量时,在重复条件下连续测量3次,以3次测量的算术平均值作为测量结果,则可得标准不确定度为:

4.1.2 由被校转向仪数显量化误差引入的标准不确定度
被校转向仪的示值分辨力0.1°,半宽为0.1/2=0.05°,均匀分布。则其标准不确定度为:

4.2 标准装置示值误差引入的标准不确定度
依据证书,校准装置的最大允许误差为 MPE±0.5°,均匀分布,则:

5 输出量的标准不确定度分量一览表
5.1 转向仪力矩输出量的标准不确定度分量一览表
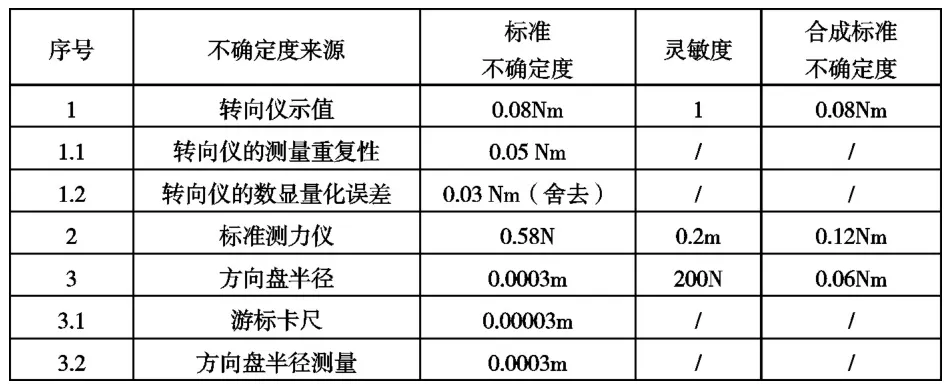
表1
5.2 转向仪角度输出量的标准不确定度分量一览表
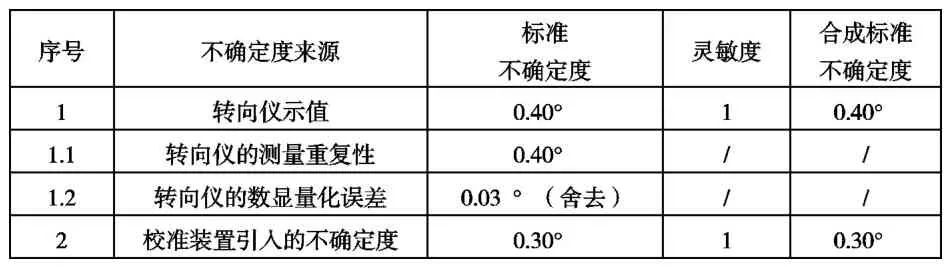
表2
6 合成标准不确定度
6.1 转向仪力矩合成标准不确定度

6.2 转向仪角度合成标准不确定度

7 扩展不确定度
7.1 转向仪力矩扩展不确定度
取k=2。故扩展不确定度应为:

7.2 转向仪角度扩展不确定度
取k=2。故扩展不确定度应为:

8 测量不确定度报告
转向仪力矩在40Nm校准时,力矩的测量结果的不确定度为:

转向仪在1080°校准时,其转角的测量不确定度为:

