基于Simulink仿真的发射筒盖反步控制算法研究
2018-07-25贾海杰侯冬冬丁梦磊
贾海杰,闫 龙,侯冬冬,江 军,丁梦磊
(1. 中国船舶重工集团公司第七一三研究所,河南 郑州 450015;2. 河南省水下智能装备重点实验室,河南 郑州 450015)
0 引 言
筒盖电液系统是一个典型的非线性时变系统,存在流量/压力非线性、液体可压缩性、电液转换、摩擦特性、阀的工作死区等非线性及阻尼系数、流量系数、油液温度等时变性[1],所以筒盖开关盖动作在传统控制方式下存在稳定性不高、控制精度差等缺点。因此,借助Simulink仿真技术建立精确的系统模型,实现筒盖角速度/时间曲线与角度/时间曲线的反步跟踪控制,可以有效提升筒盖动作的控制精度。
1 筒盖开盖动力学分析
典型的筒盖开盖机构[2]如图1所示。
筒盖跟踪目标曲线通常为角速度/时间曲线或角度/时间曲线,而精确的液压缸输入为直线位移,因此,根据机构模型,推导筒盖角度与液压缸位移的变换关系。
开盖液压推杆一端固定于某处支撑点,另一端连接在筒盖上,推动筒盖使筒盖绕转轴转动。其中筒盖转轴与支撑点的距离为固定值,液压缸推杆初始长度为,推杆与筒盖连接部位到转轴的距离为,筒盖与边的初始角度用表示,筒盖开盖角度为,对应的液压缸推杆长度为,根据余弦定理可以得到:

从而得到角度/位移变换为:

位移/角度变换为:

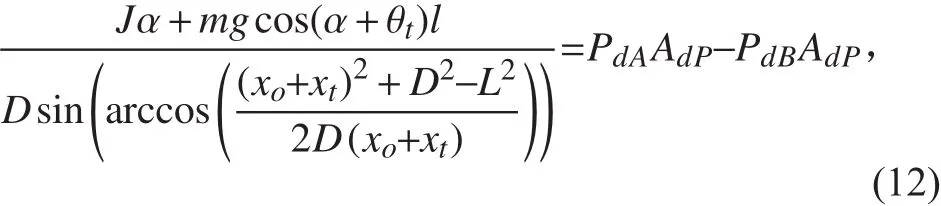
筒盖运动过程中,筒盖重力随开盖角度变换而变换,为了准确分析筒盖电液系统的变负载特性,推导筒盖对液压缸作用力与筒盖角度的变化关系:

图1 典型筒盖开盖结构原理图Fig.1 Typical launcher cover structure schematic
将筒盖质心到转轴的距离用l表示,质心与转轴连线与筒盖下沿平面夹角为,液压缸推杆与筒盖筒盖下沿平面夹角为,筒盖转动惯量为,筒盖运动角加速度为,根据力矩平衡可以得到:


综上得到液压缸负载力为:

2 筒盖电液系统模型分析
筒盖电液系统原理如图2所示。

图2 筒盖电液系统原理图Fig.2 Typical launcher cover electro-hydraulic system schematic
筒盖电液系统可以等效为经典的阀控液压缸模型[3]。当系统伺服阀的阀芯位移为时,流入液压缸腔体A和腔体B的流量可以表示为:
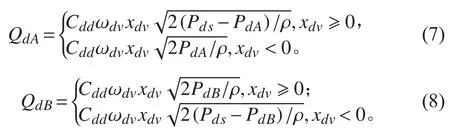

根据液压流量连续,考虑液压缸内外漏以及液压油压缩特性,将流入液压缸2个腔体的流量分别表示为:
由于活塞杆一般在中间位置附近做小幅度位移运动,因此可以认为,液压缸流量连续方程可表示为:

结合得到的液压负载力方程可以得到:

在此基础上,设计筒盖系统动作的反步控制器。
3 筒盖系统反步控制器设计
在现有的筒盖控制环节中,仅采用角度时间/时间曲线作为控制量,导致最终筒盖开盖时间控制精度不高,同时筒盖动作过程中动作平稳性不佳,为了实现筒盖动作曲线对预设曲线良好的跟踪效果,设计了对液压缸位移/时间曲线和液压缸速度/时间曲线同时跟踪的反步控制器[4]。
从筒盖系统的角度,预先设置筒盖开关盖角速度/时间曲线,通过角度/位移转换模块得到液压缸位移/时间曲线和液压缸速度/时间曲线,将其与实时采集到的液压缸实际位移、速度、液压缸压力等数据送入反步控制器,生成最终的电流控制量完成对伺服阀的控制,控制原理如图3所示。
为了采用反步法对电液系统进行控制[5],首先需要将其写成系统状态方程,系统的非线性方程写成反步法所需的严格反馈形式,选取状态变量为
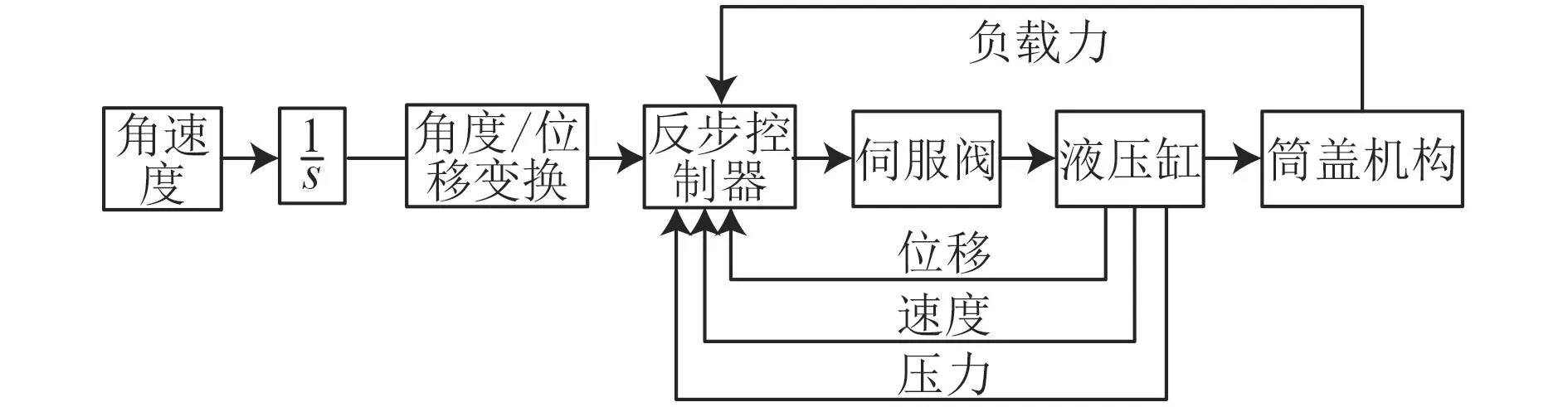
图3 反步环控制原理图Fig.3 Backstepping ring control schematic
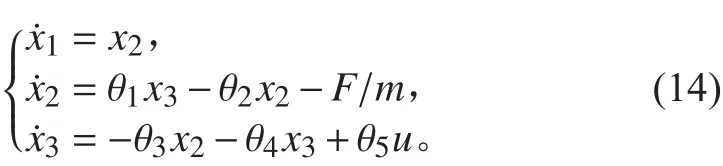
其中:

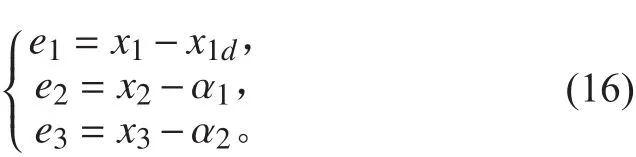
步骤1

对函数两端进行求导,并将系统的状态方程代入:

可使虚拟控制量为:
步骤2

对函数两端进行求导,并将系统的状态方程代入:

可使虚拟控制量为:

步骤3

对函数两端进行求导,并将系统的状态方程代入:
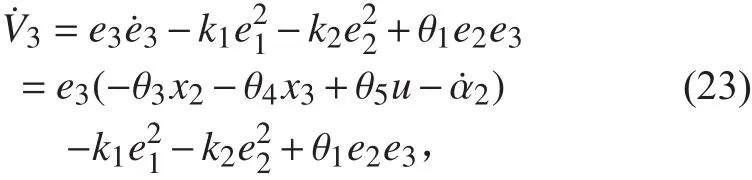
得

4 建立 Simulink 的电液系统仿真模型
根据2筒盖动力学分析与3筒盖电液系统模型分析,在Matlab/Simulink中分别搭建了液压缸模型、位移/角度转换模块、负载力计算模块,并将反步控制器在控制模型中实现,最终完成电液系统仿真模型[6]。
筒盖电液系统仿真模型如图4所示。
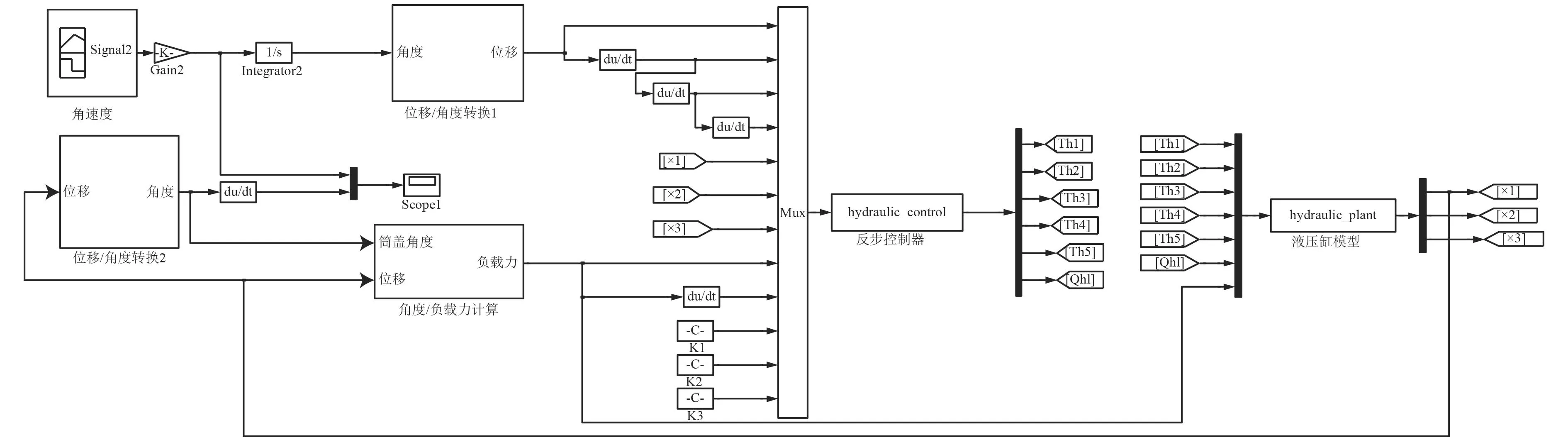
图4 电液系统 Simulink 仿真模型Fig.4 Electro-hydraulic system Simulation model
5 筒盖反步控制的仿真分析
根据实际数据,设置仿真模型中参数如表1所示。

表1 仿真模型主要参数Tab.1 The main parameters of the simulation model
通过合理调整仿真模型中位移曲线跟踪环节中的参数,达到了良好的控制效果,具体结果如图5~图8所示。
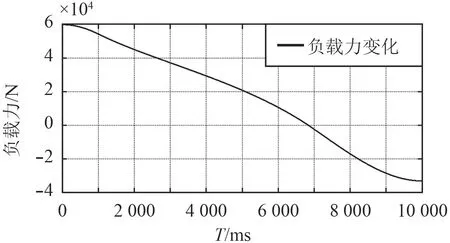
图5 负载力变化曲线Fig.5 Load force curve
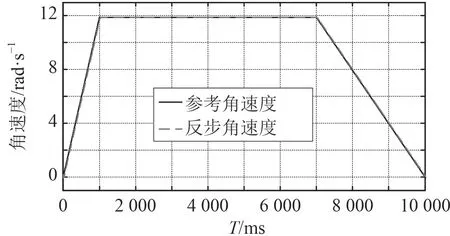
图6 角速度跟踪曲线Fig.6 Angular speed tracking curve
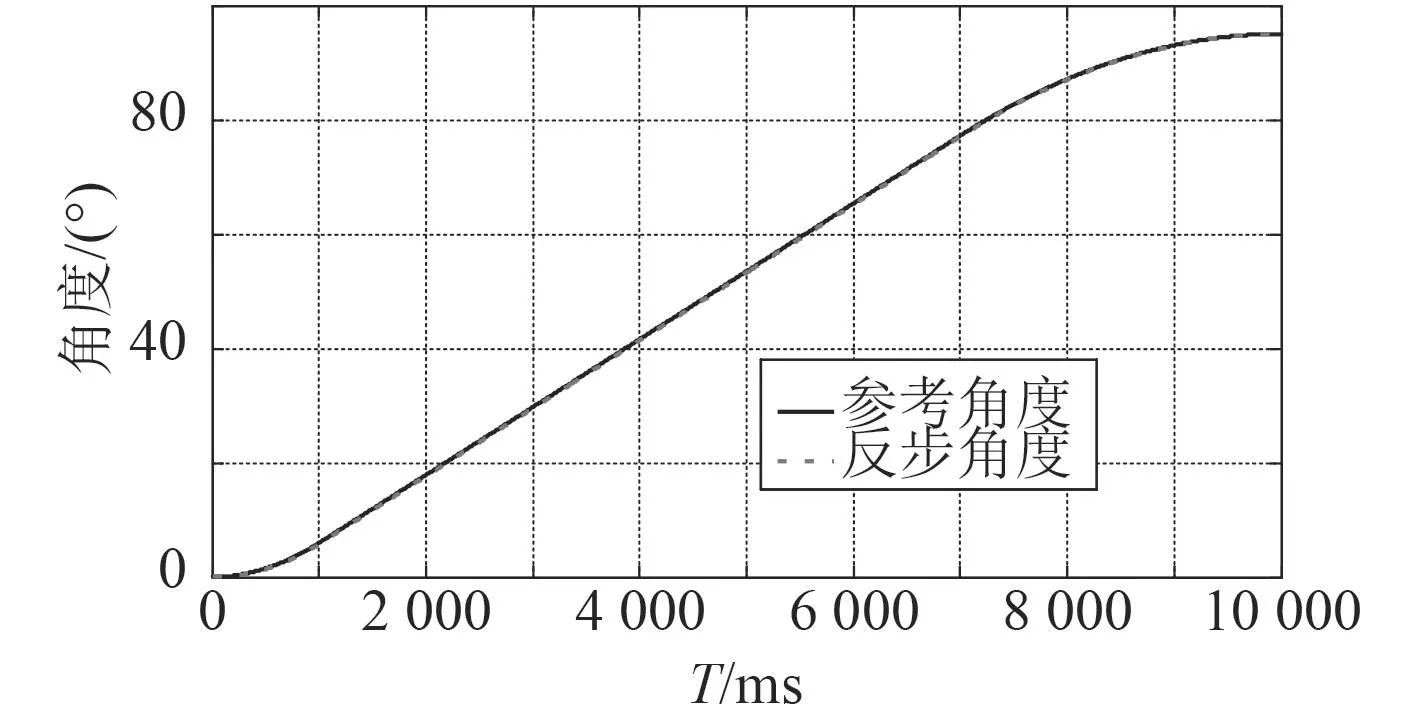
图7 角度跟踪曲线Fig.7 Angular tracking curve
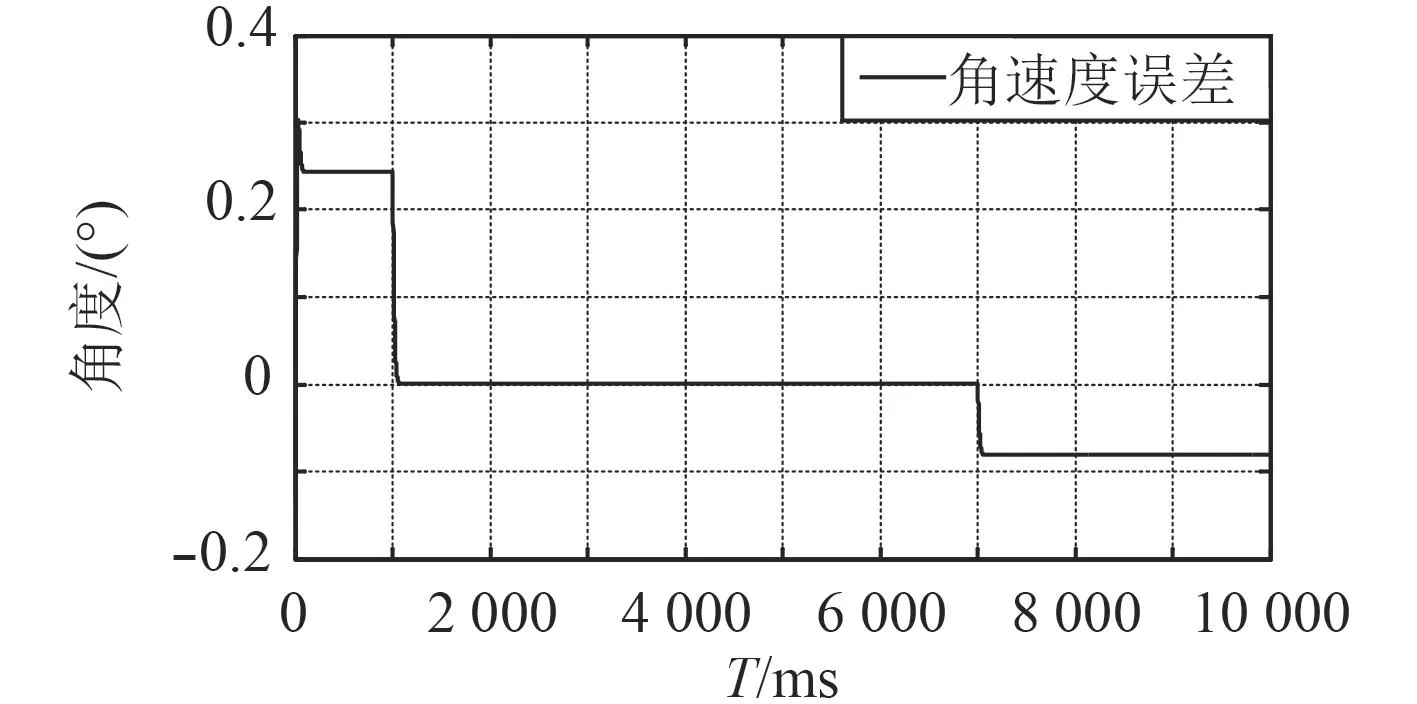
图8 角速度跟踪误差曲线Fig.8 Angular speed tracking error curve
从仿真结果可以看出,相比于原筒盖单闭环角度控制,所设计的具有速度补偿功能的反步控制器对角速度/时间曲线和角度/时间曲线的跟踪误差明显减小,最大误差减小到了0.30°,说明将反步控制算法应用到筒盖控制中能够有效提升筒盖动作控制精度。