无线智能网列车重联同步车载通信系统可行性分析
2018-07-23谷志茹龙永红
谷志茹 龙永红 唐 军
(1.湖南工业大学,湖南株洲 412007;2.中车株洲电力机车研究所,湖南株洲 412007)
由于货运专线紧张,货运压力较大,所以发展重载铁路运输是铁路货运发展方向。重载铁路运输需要解决的一个关键问题是重联同步控制,包括重联同步和重联控制两个方面。而重联同步所使用的通信方式直接决定了同步控制系统的性能和成本。
1 现有列车重联同步系统通信方式分析
目前国内已有的重载机车线路如表1所示,大秦铁路作为我国第一条双线电气化重载运煤专线,全长653 km,货远线路地形复杂多样,对重联同步控制系统的实施带来很多困难。目前在沿线建GSM-R基站,并配合使用400 MHz无线电台作为无线同步数据传输系统。朔黄重载铁路全线长662 km,对机车的重联、调度通信等使用比较新的LTE技术,并辅以无线电台。瓦西铁路是横跨晋、豫、鲁3省的出海煤运通道,全长1 260 km,是世界上第一条按轴重30 t重载铁路标准建设的铁路。蒙西铁路是“北煤南运”新的国家战略运输通道。

表1 中国主要重载铁路运输情况一览表Tab.1 Main heavy haul freight lines in China
基于上述分析,国内重载货运列车已有的重联同步控制系统,采用GSM-R或LTE的无线传输方式补充400 MHz无线电台。400 MHz无线电台建设年代久远,通信技术落后,带宽低,可靠性差,存在干扰和衰落严重的问题,不适合对安全性要求较高的应用场合。
GSM-R和LTE方式需建立地面基站和设计车载终端,对基础设施的投入和维护成本较大,不利于在重载货运线路上大面积实施。而且GSM-R和LTE作为车-地通信方式,要实现编组车辆间的同步控制,存在如下问题:
1)仅解决了机车间同步问题,对中间编组车辆的制动、缓解同步有改善,但并未完全解决;
2)地面网络的延时及通讯盲区对系统有影响;
3)无法感知中间车辆的运行状态;
4)GSM-R/LTE网络及车载电台等建设投资巨大,且目前频率资源相当紧张,只能用在运输专线,在既有线路实施该技术基本无可行性。
所以研究无线智能网列车重联同步控制系统,设计微功率车载无线通信网联车系统,集成Locotrol重联同步控制模块,实现无线重联控制功能,具有实际应用价值和理论研究意义。
2 无线智能网列车重联同步车载通信系统方案
无线智能网列车重联同步车载通信目的是选用微功率无线通信技术,设计车载无线传感通信网络,并集成Locotrol控制模块,实现无线重联控制系统;目标是所设计系统在满足可靠性和有效性的前提下,以最低成本和复杂度实施,在已有货运列车上实现即装即用,在功能上实现机车间的重联同步控制,和中间车辆的运行状态感知。
微功率无线重载重联控制系统架构如图1所示,由机车内的重联控制单元、车载通信单元(OCU)、车载中继、无线网关和地面站(AN)5部分组成。主要形成如下两个网络。

图1 微功率无线重载重联控制系统架构Fig.1 Architecture of micro-power multiple radio control system for heavy freight trains
1)车载无线局域网
机车内的重联控制单元(RCU)、车载OCU和车载中继组成车载微功率无线局域网,用来传输控制系统的重联同步控制信号,实现重联同步功能。
具体过程是:控制单元的传感器组检测到主控机车运行状况改变时,控制单元按约定好的编码规则对状态进行编码,并把编码好的状态信息发送给OCU,OCU通过车载中继网络(也可不通过中继网络)将该数据包发送到从控机车的车载通信单元。从控机车RCU收到从控机车OCU发来的数据包后,生成控制指令,这些控制指令指挥从控机车与主控机车同步完成相同的操作,同时车辆的OCU单元采集车辆传感器状态数据,并送给主控机车。主控机车收到从控机车操作完成返回的数据和中间车辆的状态数据后,重联同步的一次操作完成。
2)车-地广域网
机车车载OCU、中间编组车辆车载OCU、车载中继、无线网关通过公网连接地面站,形成广域网。
具体过程是:主控机车车载OCU通过装在机车和中间编组车辆上的传感器模块和微功率车载通信单元,实时采集车辆的速度,车钩纵向受力等状态信息,通过车载无线网络传给主控机车本地监控服务器,并通过车载中继和网关单元接入公网,到达AN端,从而实现本地和远端状态感知和状态监测与告警功能。
目前无线通信技术主要有LoRa、Zigbee、RFID、BlueTooth、Wi-Fi、Wi-Max、GSM/CDMA2000,这些通信持术按特性可以分为3类:
GSM、WiMax、CDMA等:需要建立基站,传输距离达到10 km,频率达到2.4 GHz,电池使用时间是几小时,适用于宽带移动通信等。
Wi-Fi为代表,通信距离只有100 m,频率达到2.4 GHz,电池可使用几小时,主要解决方向是宽带的最后节点接入,需要公网支持。
Zigbee,Bluetooth等,通信距离只有50 m左右,频率是2.4 G/868M/915 MHz,电池使用时间可达几年,主要用于低速短距离的通信场合。
LoRa, 通信距离达到1~15 km,工作频率是137~1 050 MHz,电池使用时间可达几年,具有超低功耗。
由以上的无线通信技术,可得到通信距离与数据传输速率是相关联的结论,要达到相对远的通信距离,数据传输速率也会越高,相应的功率消耗就越大。但是 LoRa例外,由于采用了先进的线性扩频技术及超低灵敏度接收技术,其通讯距离远,功耗低。LoRa 非常适合于需要一定规模的组网、对低功耗和远距离有强烈的要求、高安全性、可靠性的应用领域,所以本项目拟选用LoRa无线通信技术,建立重载货运列车的微功率无线通信网络,级联控制模块,实现重联控制系统。
3 无线智能网列车重联同步车载通信系统实现
与semtech等芯片方案提供商和时代电气等国内机车控制部件供应商充分合作,集成LoRa通信技术及Locotrol分布式动力控制系统,应用在货运列车重联中,完成机车无线重联控制功能。
微功率无线重联控制系统在机车和编组车辆上的基本构成如图2所示。通过控制接口Jc和数据接口Jd将制动控制单元与车载通信单元相连。Jc的作用一方面将制动控制单元的注册、注销等控制命令发送至车载通信单元;另一方面将车载通信单元的网络状态等信息返回制动控制单元。Jd的作用将控制单元的数据帧传送给OCU,随后车载通信单元透明转发Jd接口的数据帧。
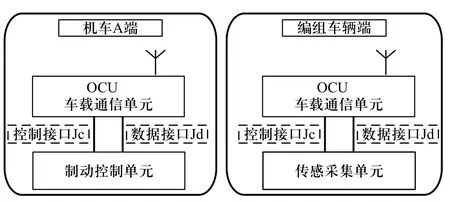
图2 微功率无线重联控制系统构成Fig.2 Composition of micro-power multiple radio control system
微功率无线控制系统实现如下内容。
1)数据广播与多播
要实现主控机车与从控机车的重联同步控制功能,需要数据广播和多播的业务支持。LoRa网络可提供点对多点的数据广播业务,并可通过地面LoRa网关接入地面指挥调度系统(如果有需求),实现了基于分组交换业务的点对多点数据会议功能。
2) 主控机车通信单元的数据采集功能
主控机车通信单元同时采集机车和车辆状态信息,其主要功能有:完成主控机车及车辆间的通信;采集从控机车和车辆的状态信息,同时并转发给机车管理维护单元。
3)可靠性措施
货运线线路多位于山脉或峡谷,地形复杂且多样,对重联制动系统的同步可靠性提出了严格要求。例如两个长大下坡区段,组合列车需要进行循环制动。目前的可靠性措施是:车载通信单元和车载中继均采用热备机制,当诊断出任何故障时,要求系统迅速自动切换到备用单元进行工作。这种方法增加了系统冗余和成本,并不能根本解决问题。
4)实时状态监测与告警
在主控机车上设置故障诊断管理单元,实现对全线车载通信单元在线和数据传输的实时监测,对车辆的运行状态实诊断,当发生异常情况时进行告警。
4 小结
结合列车重联技术和无线通信技术的发展情况,通过将微功率无线传输LoRa应用于货运列车,形成具有重联同步功能的车载局域网和具有状态监测和告警功能的车-地广域网;结合重载铁路的设备配置和运行情况,通过合理的工程化实施安排,可以在不影响既有线路运输的情况下实现现有货运列车的提质改造。
