地球静止卫星电推进轨道保持策略优化
2018-07-23,,,
,,,
1. 中国科学技术大学 精密机械与精密仪器系,合肥 230026 2. 西安卫星测控中心 宇航动力学国家重点实验室,西安 710043
地球静止卫星(Geostationary Satellites,GEO)被广泛应用于通信、气象等诸多领域,其工作特点决定了它在整个飞行生命内必须保持在特定的经度和纬度位置上。但是在自然摄动力的作用下,GEO卫星会逐渐偏离其标称位置,所以,需要一个合适的轨道保持策略来抵消自然摄动力的作用。
早期的GEO卫星大多配置化学推力器,运用的是一个等待式的保持策略:只在卫星将超出位置保持死区时进行控制,对应的轨道要素修正量由位置死区的大小确定。这个策略只粗略地将必要控制次数减少,从减少地面对卫星的操作这一角度来看效果是显著的。为了抵消轨道要素的变化,推力器通常每两周点火一次,每次持续数十分钟,提供数十牛的推力。由于点火时长和GEO轨道周期的比率很小,化学推力器的推力可以视为脉冲推力。文献[1]给出了一套系统的静止轨道定点控制和多星共轨控制的策略、模型和算法,在中国静止轨道卫星管理工作中发挥着巨大的作用,取得了显著的成果。文献[2-3]也都给出了经过工程检验的经典脉冲控制方法。
近年来,电推进技术逐渐成熟,由于其具有节约速度增量(燃料消耗)、提高长期定位精度等显著优点,已经逐渐取代化学推进在GEO卫星轨道保持上的应用[4],电推进平台已经成为商用通信GEO卫星的标配。但是,由于电推进推力器只能提供很小的推力(通常小于100 mN),要达到和化学推力器同样的轨道保持目标,必须运用一个预防式的策略,除了满足位置保持死区的约束,还要阻止航天器位置超出单一小推力能够修正的范围。在这种情况下,电推进推力器可能需要每天开机数小时,脉冲假设不再成立,传统控制策略也不再适用,所以需要设计新的方法来求解这个控制问题。
文献[5-6]用非线性规划技术来优化求解电推进GEO轨道保持策略。文献[7]首先将动力学模型在静止卫星定点位置处线性化,然后分两步求解控制策略:1)利用微分包含方法求解推力连续变化的保持策略;2)将推力连续变化的策略转化为开关控制。
然而这些方法或者没有考虑东西控制和南北控制的耦合,或者没有考虑东西控制和南北控制的时刻冲突问题。为了减少地面控制次数,本文假设在一天之内推力器只开机一次,并且两次开机之间要保持一定的时间间隔。动力学模型参考文献[7-8]的线性化方法,在此基础上又进一步将模型拟平均化,得到线性时变模型。基于无控条件下模型的预报和轨道要素的控制约束,用序列二次规划方法对控制量和控制时间进行最优化求解。对于长期轨道保持问题,采用闭环思路,在满足状态约束的较短周期内(周期时长由卫星定点位置的摄动条件和控制死区的大小确定),对控制进行规划,将结果带入模型预报下一个周期的轨道修正量,以此类推,从而在较长时间内实现燃料消耗和地面对卫星操作次数的最优化。文章利用仿真验证了策略和优化计算方法的可行性。
1 动力学与控制模型
和化学推力器相比,电推进推力器能够提供的推力很小,在GEO卫星位保机动中开机时长和次数都大大增加。这时,脉冲位保控制策略中的一些针对摄动长期项设计的“控制环”不再适用,电推进控制序列的规划应当基于包含长期项和长周期项的平根轨道外推。为了提高序列优化求解的计算效率,本文将摄动矩阵进一步线性化[9]。
1.1 动力学方程
对于一条理想的地球静止轨道,倾角i=0°,偏心率e=0,半长轴a为地球静止轨道半径,而升交点赤经Ω、近地点幅角ω和平近点角M的值只是数学意义上的奇异值。为了避免在轨道计算中出现奇异值,本文采用文献[3]定义的春分点轨道要素:
(1)
式中:l=ω+M+Ω-Θ,Θ=Θ0+ωet,Θ0为t=0时刻格林尼治恒星时角,ωe为地球自转角速度;ey=esin(ω+Ω),ex=ecos(ω+Ω);iy=isinΩ,ix=icosΩ。
在历元真赤道坐标系(True of Date,TOD)下,考虑地球非球型引力摄动(四阶主项)、日月引力摄动、太阳光压摄动,建立微分方程:
(2)
(3)
式中:R为摄动函数,推导见参考文献[1],由于轨道保持考虑的是长期操作,只需要控制轨道平根在一定范围内即可,因此将式(3)中的短周期项忽略,仅保留半月及以上的周期项和长期项,具体形式限于篇幅这里不再列出。
fG(x,t)为推力作用方程,由高斯行星方程可得:

(4)
从而建立状态变量方程

(5)

卫星在空间中相对地球的真实位置角度由真经度λ、真纬度φ反映:
λ=l+2exsin(l+Θ)-2eycos(l+Θ)
(6)
φ=ixsin(λ+Θ)-iycos(λ+Θ)
(7)
1.2 解析控制方程
在优化求解过程中,由动力学模型积分计算推力作用效果难以实现,所以需要一个合适的解析形式的控制方程来近似计算推力作用效果。
在连续小推力的条件下,平经度增量不仅仅由径向加速度引起,切向加速度也会引起漂移率的变化,在一次控制中,推力对平经度的作用方程变成:
(8)
式中:VS为地球静止轨道标称速度;Tf为控制计算周期的终点时刻;T为连续推力开始时刻;Δt为连续推力持续时长;ar,at分别为径向和切向加速度。推力对其他要素的作用方程参考文献[1],统一的形式如下:
(9)
(10)
2uTksinLk)
(11)
2uTkcosLk)
(12)

(13)

(14)
式中:K为总开机次数;tk和τk为第k次开机的中点时刻和时长;Lk为第k次控制中点时刻的卫星平赤经;uRk,uTk,uNk分别为第k次控制径向,切向和法向推力大小。
2 轨道保持策略
2.1 策略设计
电推进GEO卫星轨道保持需要频繁开关机,所以通常采用多天多次控制的整体优化策略[10]。根据定轨数据、控制周期、位置死区和动力学模型的无控预报,求解控制序列(包括推力器组合、对应的控制时刻和时长),然后将序列发送至卫星,由卫星按照序列自主进行轨道保持控制,当前控制周期完成后,由测控网重新确定轨道数据,如图1所示。
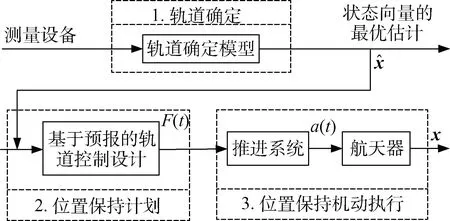
图1 电推进GEO卫星轨道保持控制流程Fig.1 Station keeping control flow of GEO satellites by electric propulsion
通过这样的策略,将控制计算问题归结为多次控制序列的求解[11]。式(8)中有线性项,所以在进行非线性规划时,如果控制周期内存在多组东西控制,控制时刻最早的一组收益最大,序列中将只有第1组非零(在不进行偏心率控制时,仅第一组中的1个非零),导致轨道要素变化路径无法满足状态约束。所以,在进行较长周期序列计算时,需要考虑卫星定点位置的漂移率和控制死区的大小,将一个控制周期划分为若干子周期,每个子周期内包含一组东西控制和数次南北控制。
2.2 控制序列的最优化求解
设计变量为开机时刻和开机时长,分别有n个,一一对应。
性能指标为总的速度增量最小,电推进推力器推力恒定,所以等价于总的开机时间最短:
(15)
式中:nk为第k次开机使用的推力器个数;τk为开机时长。
约束条件为:
1)推力器本身的开关机约束:单次开机时长不超过4 h;后一次开机时刻比前一次关机时刻至少推迟15 min。
2)控制目标约束:轨道倾角约束,偏心率约束,平经度约束。通过对这3个轨道要素的约束,就能将GEO卫星的位置限制在相应的死区内。
3)序列本身数学约束:最后一次关机时间不超出控制周期终点时刻。
3 仿真分析
3.1 模型无控预报
卫星质量4 500 kg,面质比0.02,光压系数1.5,推力器推力恒定0.045 N,假设卫星质量恒定,初始轨道平根数(TOD)为:历元时刻2016年12月1日00:00:00,半长轴42 165.7 km,偏心率0.000 194 58,轨道倾角0.01°,升交点赤经293.219°,近地点幅角359.949°,平近点角180°。
在相同初始条件下(对应的瞬根和平根输入),本文建立的平根外推模型MEPP和STK软件HPOP模型4周轨道外推结果对比情况如图2所示。
由MEPP的平根和HPOP的瞬根外推结果比对可知,平根半长轴变化趋势呈线性且位于瞬根震荡的中心处,倾角变化趋势完全重合,偏心率变化趋势同样位于瞬根偏心率震荡的中心处,真经度平根和瞬根的比对也基本重合。所以,通过MEPP模型能够高效地获取GEO卫星轨道要素的平均变化趋势,且精度满足控制设计的精度需求。

图2 模型无控预报与HPOP外推对比Fig.2 Comparison between model of this paper and HPOP
3.2 控制序列的最优化求解
本文研究的卫星推力器配置方式参照文献[3],为二推力器配置,如图3所示。3种推力组合的加速度分量如表1所示。

图3 卫星电推进推力器配置Fig.3 Thruster configuration of satellites by electric propulsion

推力组合加速度分量径向切向法向推力器1bRbTbN推力器2-bR-bTbN推力器1+2002bN
卫星质量4 500 kg,面质比0.02,光压系数1.5,推力器推力恒定为0.045 N,假设卫星质量恒定,初始轨道要素同第3.1节。
线性模型无控和按照优化求解的序列控制情况下的轨道外推对比情况如图4所示。4周一天一控优化序列结果如表2所示。
按照第2.1节的策略,首先进行东西控制序列规划,将4周均分为7个子周期,每个子周期内包含一组东西控制项(一东一西两次控制),总计14次东西控制。由表2可知,规划得到的非零东西控制项有9个,其中第5、7子周期的一组东西控制项都非零。将这9次控制的时刻和时长加入约束,进行南北控制序列规划。由表2显示的序列可知,南北序列规划结果近似于bang-bang控制,每次控制时长相同,传统的脉冲南北位保固定在升降交点进行控制[12],而序列规划会以燃料最优为目标搜索出控制周期内倾角向量的最佳控制方向,所以南北控制序列中每天的控制时刻也相近。

图4 无控-受控对比Fig.4 Comparison between controlled and uncontrolled

控制次序推力组合控制时长/h开始时刻/d控制次序推力组合控制时长/h开始时刻/d11+23.4300.169151+23.43014.13121+23.4301.1661620.72815.33931+23.4302.1631710.10216.000421.4033.2201821.20517.35051+23.4304.158191+23.43018.12061+23.4305.155201+23.43019.11771+23.4306.153211+23.43020.114821.3987.179221+23.43021.11291+23.4308.147231+23.43022.109101+23.4309.1442421.21223.350111+23.43010.1422510.21024.8891221.09511.319261+23.43025.101131+23.43012.1362720.46126.380141+23.43013.133281+23.43027.095
图4中前7个图显示了受控(一天一次开关电推进控制)和无控两种情况下的4周轨道要素变化情况。在控制序列的优化求解中,轨道要素约束设置为i≤0.01°,e≤1.8×10-4,-0.01°≤l-lS≤0.01°,可见,求解得到的控制序列满足要求。图4中最后一个图显示了两天一次控制时,真经度和真纬度无控-受控变化情况,14个控制项中有4个东西控制项和10个南北控制项,减少控制次数限制了控制能力,轨道参数变化路径也波动更大,所以也要相应地增大控制死区、放松参数约束条件。图5显示了推力器1、2的开关机时间。

图5 4周一天一控推力器开关机时刻Fig.5 Thrusters switch time under once a day control
由上述仿真结果可知,文章提出的GEO卫星轨道保持控制策略能够通过优化求解得到精确、平稳的电推进控制序列,控制结果满足约束条件,轨道参数演化路径满足控制死区要求,且控制时刻分布均匀(一天一次)。相比而言,文献[7]的控制策略中总的控制次数很多,且频繁时一天数次开关机,优化求解和工程应用的复杂度都大大增加。
4 结束语
本文研究了电推进地球静止卫星的轨道保持问题。针对现有方法的优缺点,建立了摄动和开关型连续小推力条件下的线性模型,给出了离散条件下的解析形式推力作用方程,提出了考虑工程适用性的长期轨道保持控制策略,给出了对应优化求解问题的数学模型和求解方法。按照本文的方法,对二推力器配置下的电推进GEO卫星28天轨道保持控制序列进行求解,并仿真验证了序列的可行性和准确性。结果表明,相比现有的方法,本文提出的电推进GEO卫星轨道保持策略燃料消耗近似最优、控制频次自主可控、轨道参数变化稳定,有一定的工程实用价值。
