基于加权鉴别函数的二进制偏移载波信号跟踪方法
2018-07-23,,,,,
,,,,,
中国空间技术研究院 西安分院,西安 710100
作为全球定位系统(Global Positioning System, GPS)信号现代化的重要成果,二进制偏移载波(Binary Offset Carrier, BOC)信号能与传统的二进制相移键控(Binary Phase Shift Keying, BPSK)信号保持高度的谱分离,同时实现更高的码跟踪精度与抗多径性能[1]。因此,BOC信号在现代化全球卫星导航系统(Global Navigation Satellite System, GNSS)中得到了广泛应用。GPS的M码信号采用了正弦BOC(10,5)信号,而中国的北斗系统(BeiDou System, BDS)设计了BOC(14,2)与BOC(15,2.5)信号[2]。
BOC信号具有出色的性能,然而,当使用传统的延迟锁定环(Delay Lock Loop, DLL)进行跟踪时,采用非相干超前减滞后功率(Noncoherent Early minus Late Power, NELP)鉴别函数,BOC信号的多峰自相关函数将引起跟踪模糊问题[3],即跟踪环路可能锁定错误的位置,引入无法容忍的跟踪偏差。目前主要有三类方法处理这一问题,第一类是将BOC信号的每个主瓣当成BPSK信号处理,包括BSPK-like方法[4]及其改进方法[5],虽解决了跟踪模糊问题,但也损失了BOC信号的优良性能。第二类是通过检测或者校正的方式避免误锁,包括峰跳法(Bump-Jump, BJ)[6]、双估计方法(Double Estimation Technique, DET)[7]以及DET的改进方法[8-9],由于并未移除模糊,这类方法通常在低载噪比条件下不可靠[10]。第三类是构造一个无副峰的组合相关函数或无误锁点的鉴别函数,可以完全解决模糊问题,是目前研究的主流方向。基于组合相关函数的方法包括子载波相位消除技术(SCPC)[11]、基于伪相关函数的无模糊延迟锁定环(Pseudo correlation function based Unambiguous Delay Lock Loop, PUDLL)方法[12]、对称脉冲模糊移除(Symmetrical Pulse Ambiguity Removing, SPAR)方法[13]以及文献[14-16]的方法等;构造鉴别函数方法在文献[17-19]中给出。这类方法通常需要构造特殊的本地参考波形,在移除模糊的同时,造成码跟踪性能的明显下降。
NELP鉴别函数能实现高的码跟踪性能,但存在模糊问题,而SCPC鉴别函数是无模糊的,但码跟踪精度低。在研究NELP和SCPC方法的基础上,提出将两者鉴别函数进行线性加权,能够在实现无模糊的同时保持高的码跟踪精度,在实际低载噪比环境中具有更强的适应性。
1 信号模型与问题描述
1.1 BOC信号
BOC信号是由伪随机噪声(Pseudo Random Noise, PRN)码与一个方波子载波相乘得到的,表示为sB(t)=c(t)sc(t)。其中,c(t)为PRN码波形,sc(t)=sgn[sin(2πfst+φ0)]为子载波,fs为子载波频率,φ0为子载波初相。在GNSS中,只使用了正弦BOC信号(φ0=0)与余弦BOC信号(φ0=-π/2)。BOC信号由子载波频率fs=m×1.023 MHz和PRN码速率Rc=n×1.023 兆码片/s确定,记为BOC(m,n)。
1.2 跟踪模糊问题
BOC信号的跟踪模糊问题产生的原因是其自相关函数存在多个副峰,正弦BOC信号的归一化自相关函数为[10]:
(1)
相应的,可以得到余弦BOC信号归一化自相关函数Rc ,c(τ)。图1(a)给出了BPSK(5)、sin-BOC(10,5)与cos-BOC(10,5)信号的归一化自相关函数,可以看到,BPSK(5)信号存在一个主峰,而正弦BOC(10,5)除主峰外还有2m/n-1=6个副峰,余弦BOC(10,5)除主峰外还有2m/n+1=8个副峰。
GNSS信号码跟踪环通常基于延迟锁相环(DLL),码环鉴别函数采用非相干超前减滞后功率(NELP)鉴别函数,鉴别函数表示为:
DN,d(τ)=|R(τ-d/2)|2-|R(τ+d/2)|2
(2)
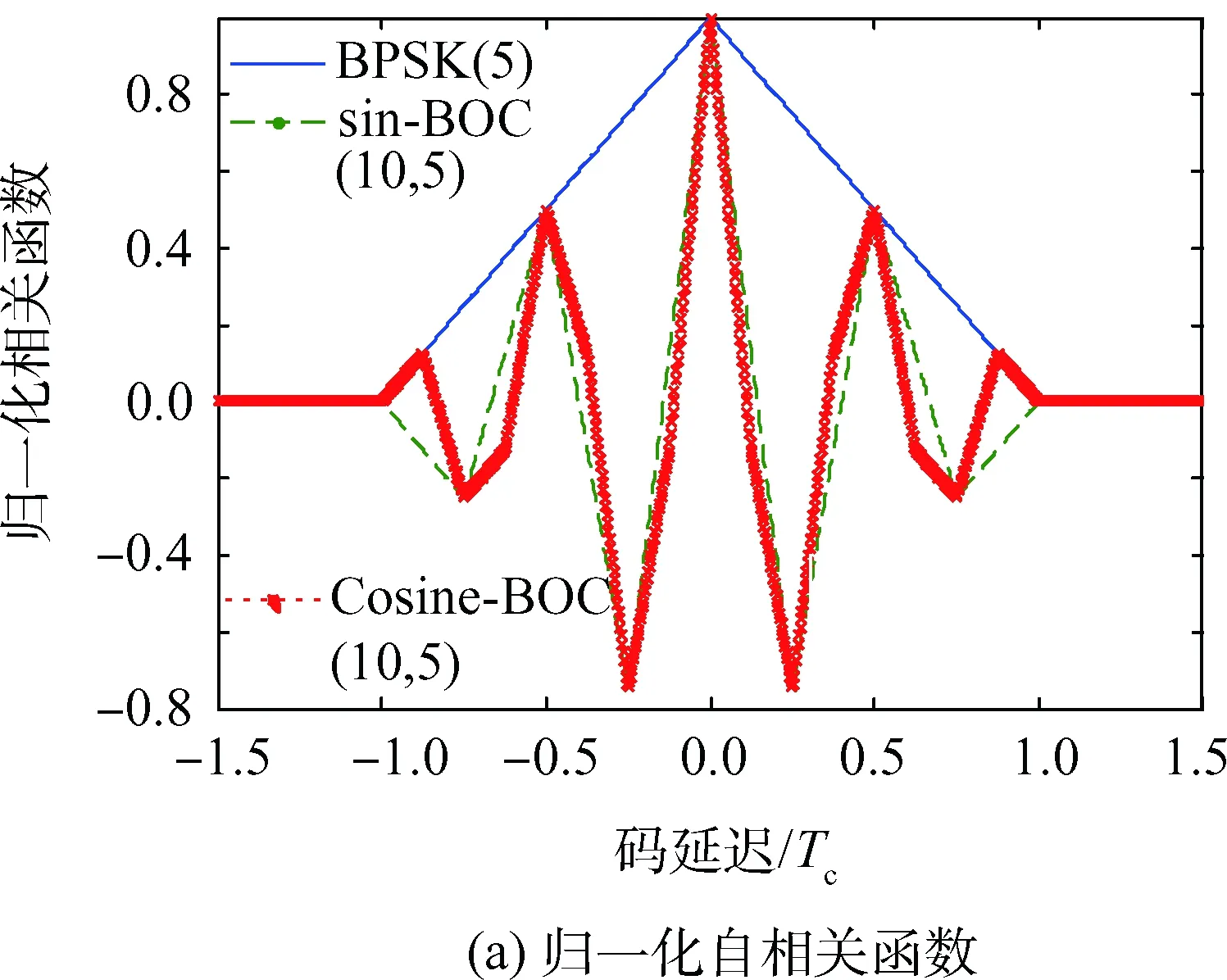
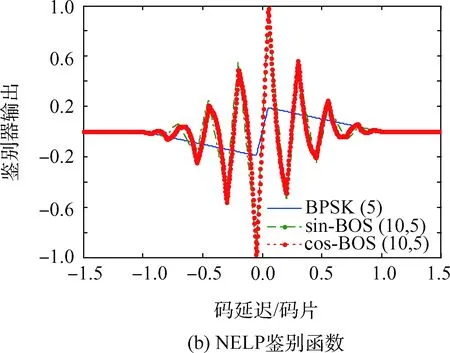
图1 自相关函数与NELP鉴别函数Fig.1 Auto-correlation functions and NELP discriminator functions
式中:R(τ)为相关函数;d为超前减滞后间隔。将式(1)代入式(2)可得sin-BOC信号的NELP鉴别函数,如图1(b)所示。图1(b)中同时给出了BPSK(5)、sin-BOC(10,5)与cos-BOC(10,5)信号的鉴别函数,d=0.1Tc。可以看到,BPSK信号只在原点处存在一个正的过零点,而BOC信号的多峰自相关函数导致其鉴别函数存在多个正过零点,除原点外的正过零点称为误锁点,一旦DLL锁定到了误锁点上,将引入大的跟踪偏差,这就是BOC信号的跟踪模糊问题。
2 SCPC方法
SCPC方法是一种BOC信号无模糊捕获、跟踪方法,在SCPC方法中,接收机要同时复现正弦BOC信号与余弦BOC信号,采用的扩频码与所接收的BOC信号相同。
以正弦BOC为例,对于正弦BOC(10,5)信号,图2(a)给出了不带限以及40.92 MHz带限下,SCPC方法得到的相关函数。可以看到,当不带限时,SCPC方法的组合相关函数具有多个峰;而带限后,其组合相关函数基本保持三角形特征。对应的SCPC鉴别函数表示为:

(3)
在SCPC方法中,当选取合适的相关器间隔时,能够保证鉴别函数无误锁点。图2(b)给出了sin-BOC(10,5)信号40.92 MHz带限下,不同相关器间隔的SCPC的鉴别函数,可以看到,当相关间隔取为0.2、0.3、0.7个码片时,鉴别函数是无误锁点的。
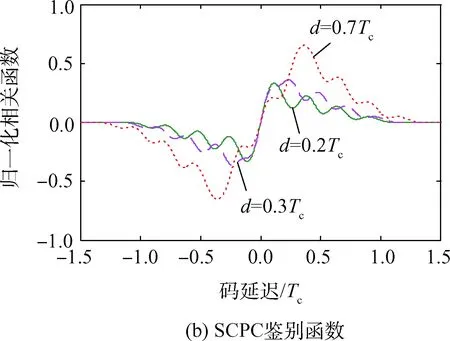
图2 SCPC方法的组合相关函数与鉴别函数Fig.2 Combined correlation functions and discriminator functions of SCPC method
与同码速率的BPSK信号相比,BOC信号的自相关函数主峰更尖锐,因此,BOC信号的潜在码跟踪性能更高。然而,SCPC方法破坏了BOC信号的尖峰特性,虽然解决了跟踪模糊问题,但是却损失了BOC信号具有的高的码跟踪性能。
3 BOC信号跟踪方法
3.1 加权鉴别函数
在移除BOC信号的跟踪模糊问题时,为了降低码跟踪性能的损失,选取合适的加权系数与相关器间隔,将NELP和SCPC两鉴别函数进行加权,获得无模糊的鉴别函数。以sin-BOC信号为例,加权鉴别函数表示为:
Dw(τ)=DN,d1(τ)+wDS,d2(τ)=
(4)
式中:w为加权系数;d1为NELP鉴别函数采用的相关器间隔,d2为SCPC鉴别函数采用的相关器间隔,d2可与d1相同或不同。考虑到SCPC鉴别函数的跟踪精度低,所以w的设计原则是:在保证加权鉴别函数无误锁点的前提下尽量小。图3(a)和图3(b)分别给出了sin-BOC(10,5)和cos-BOC(10,5)信号40.92 MHz带限下,不同相关器间隔的加权鉴别函数。
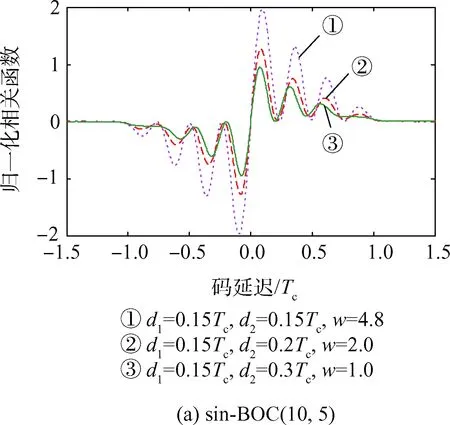
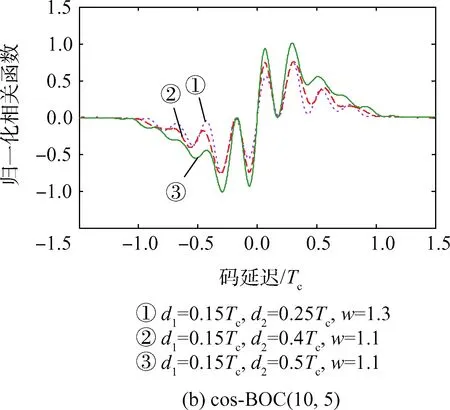
图3 不同相关器间隔下的加权鉴别函数Fig.3 Weighted discriminator function with different correlator spacings
传统的捕获过程是码相位和载波多普勒频率的二维搜索过程[20],而码相位搜索间隔受到线性牵引范围的制约。加权鉴别函数是NELP和SCPC鉴别函数的加权和,其线性牵引范围与NELP相当。这意味着,在实际应用中,由捕获阶段转入跟踪时,对捕获精度的要求也与NELP相当。
3.2 码跟踪方法
图4给出了基于加权鉴别函数的码跟踪环示意,接收机需同时产生sin-BOC和cos-BOC本地参考信号,与接收的sin-BOC信号相关。当接收sin-BOC信号时,以相关间隔d1和d2分别生成本地sin-BOC信号的超前与滞后复现信号,以相关间隔d2生成本地cos-BOC信号的超前与滞后复现信号,接收cos-BOC信号与此类似。本方法共需要采用12个相关器,I、Q支路各6个,所需相关器资源是NELP和SCPC方法的和,一定程度上增加了实现复杂度。但需指出的是,当d2=d1时,只需要8个相关器即可。

图4 基于加权鉴别函数方法的码跟踪环路Fig.4 Code tracking loop based on weight discriminator function
图4中,rB(t)表示接收到的下变频后的BOC信号,当载波频率已准确移除时,其基带表示为[15]:
nc(t)+jns(t)
式中:C为载波功率;D(t)为导航电文,由于采用非相干鉴别函数,电文符号影响可忽略;τ0为传播延迟;θ0为载波初相位;nc(t)、ns(t)为独立同分布的高斯噪声,均值为0,双边功率谱密度N0。
各个相关器归一化输出为:
(5)

式中:H(f)为滤波器传递函数;Gs ,s(f)=F[Rs ,s(τ)]为sin-BOC信号的功率谱;Gs ,c(f)=F[Rs ,c(τ)]为sin-BOC信号与cos-BOC信号的互功率谱;F[·]为傅里叶变换。
根据式(4),加权鉴别函数表示为:

(6)
3.3 码跟踪误差
码跟踪误差的计算式为[17]:
(7)

相关器输出满足联合高斯分布,考虑到Δθ≈0,当τ=0时,由式(5)可得,IE1、IL1、IE2、IL2、IE3、IL3满足分布:
(IE1,IL1,IE2,IL2,IE3,IL3)T~N(μ,Σ)
(8)
μ和Σ分别为:
(9)
式中:d3=d2-d1,d4=d2+d1。同理,QE1、QL1、QE2、QL2、QE3、QL3满足分布N(0,Σ),且I支路输出与Q支路输出不相关。基于式(6)~(8)可以得到码跟踪误差的结果。
4 仿真结果
本文以sin-BOC(10,5)信号为例,对本文提出的加权鉴别函数方法的码跟踪性能、抗多径性能进行分析,仿真参数为:信号带宽40.92 MHz,环路带宽BL=1 Hz,相干积分时间Tp=1 ms。
4.1 码跟踪误差
在本文加权鉴别函数方法中,加权系数的w值由相关器间隔d1和d2共同确定,如图5所示。图5(a)给出了不同d1和d2的下的权值w,图5(b)是对应的码跟踪误差,C/N0=35 dB-Hz,可以看到,码跟踪误差并不是随d1和d2线性变化,当d1=0.13Tc,d2=0.4Tc,w=0.8具有最小的码跟踪误差。
图6给出了码跟踪误差的蒙特卡罗仿真结果,对于每个载噪比值,鉴别器输出标准差通过10 000个独立值统计得到,相关器间隔为d1=0.1Tc,d2=0.3Tc,w=1.1。从图6中可以看到,对于sin-BOC(10,5)信号,加权鉴别函数方法基本保持了BOC信号的码跟踪性能。与其他无模糊跟踪方法SCPC、PUDLL、SPAR相比,加权鉴别函数方法的码跟踪误差最小。进一步给出定量的结果,将SCPC、PUDLL、SPAR方法与WDF方法的码跟踪误差求比值[15],结果如图7所示。
可以看到,相比于SCPC、PUDLL、SPAR方法,WDF方法的码跟踪精度至少改善了2.5 dB、5.5 dB与8.3 dB,随着载噪比增加,改善越显著,当C/N0=45 dB-Hz时,改善达到10 dB以上。
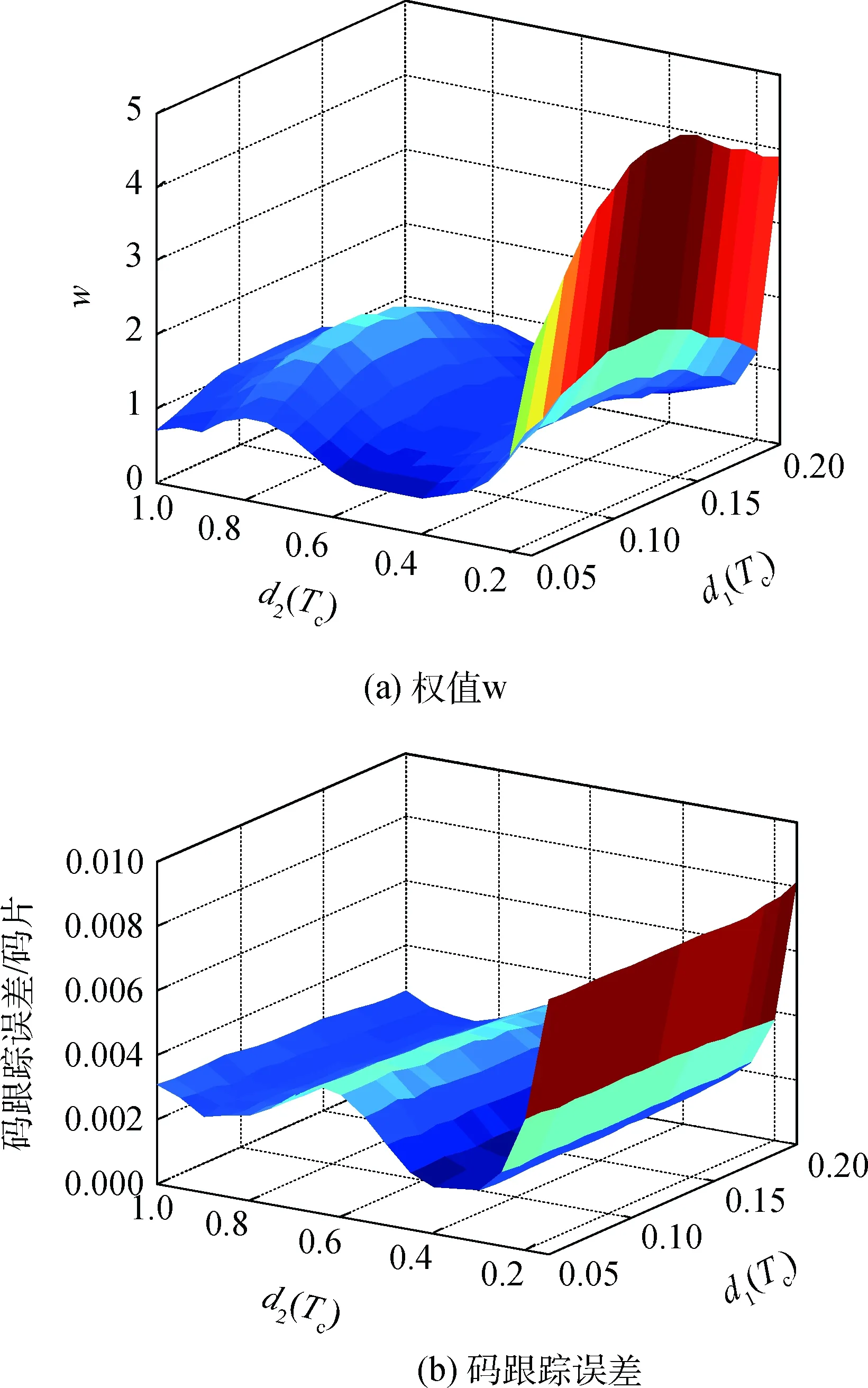
图5 码跟踪误差随相关间隔的变化Fig.5 Code tracking error versus correlator spacing
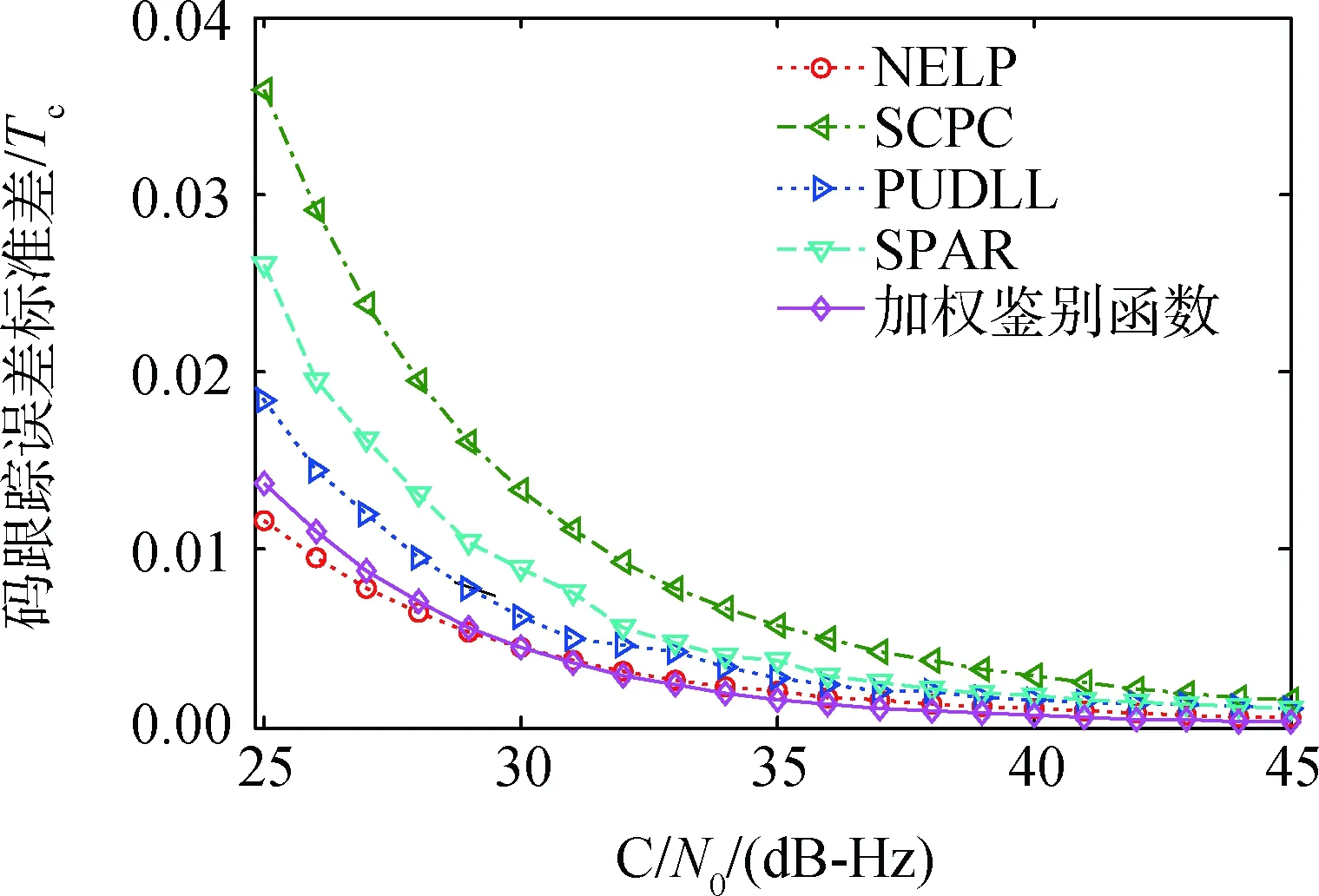
图6 不同载噪比下的码跟踪误差Fig.6 Code tracking error versus C/N0
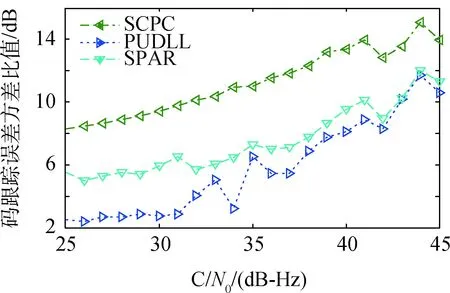
图7 相对于加权鉴别函数方法的码跟踪误差方差比值Fig.7 Ratio of code tracking error variance with respect to WD
4.2 抗多径性能
多径会引起相关函数的失真,从而导致鉴别曲线过零点偏移,引入跟踪偏差。与文献[3]一样,考虑有一条多径的情况,多径信号相对于直达信号有延迟,其信号强度有衰减。在仿真中,多径直达比(Multipath to Direct Ratio, MDR)为-10 dB。图8(a)给出了sin-BOC(10,5)信号的多径误差包络,此时,相关器间隔为d1=0.1Tc,d2=0.3Tc,w=1.1。图8(b)给出了对应的多径误差包络曲线1.5个码片内的面积,可以看到,相比于NELP,加权鉴别函数方法的抗多径性能略优,也就是说,能够保持BOC信号的抗多径性能优势。相比于SCPC、PUDLL、SPAR,加权鉴别函数方法的多径误差仅为它们的60.4%、32.8%与38.0%。
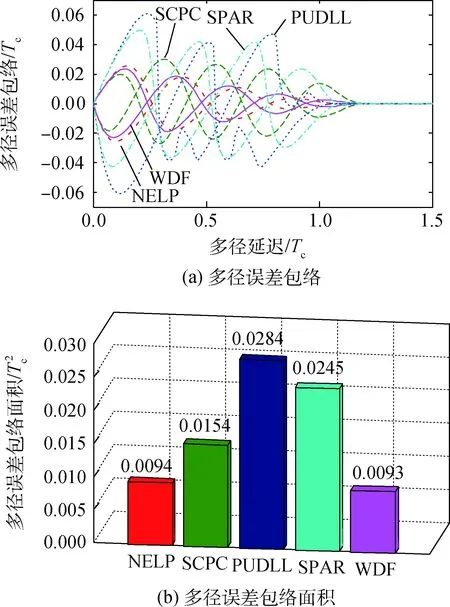
图8 抗多径性能Fig.8 Anti-multipath performance
5 结束语
相比于BPSK信号,理论上BOC信号能够达到更高的码跟踪精度,然而,其跟踪模糊问题限制了BOC信号的实际性能。目前解决模糊问题的主要思路是基于组合相关函数或者加权鉴别函数,虽能实现无模糊跟踪,但容易导致码跟踪性能的明显恶化。
本文在分析BOC信号的跟踪模糊问题基础上,提出了一种基于加权鉴别函数的无模糊跟踪方法,采用高精度却有模糊的NELP鉴别函数,与无模糊却精度低的SCPC鉴别函数进行加权,解决了BOC信号的跟踪模糊问题。本文方法的主要优点包括:1)该方法同时适用于与sin-BOC信号和cos-BOC信号;2)不需要额外设计特殊的本地参考波形;3)能够消除模糊威胁,同时保留了BOC信号的跟踪性能与抗多径性能方面的优势。相比于已有的无模糊跟踪方法SCPC、PUDLL与SPAR,在码跟踪误差方面,加权鉴别函数改善了至少2.5 dB、5.5 dB与8.3 dB;在抗多径性能方面,加权鉴别函数多径误差仅有60.4%、32.8%与38.0%。因此,在较低载噪比和多径环境下,加权鉴别函数方法具有更大的应用前景。此外,加权鉴别函数还存在有待解决的问题:一方面为达到最佳的码跟踪性能,相关器间隔选取需要满足一定的约束,降低了灵活性;另一方面,需要更多的相关器资源,增加了实现复杂度。在解决BOC信号跟踪模糊问题时,如何在保持码跟踪精度的同时,进一步降低实现复杂度是下一步需要解决的问题。