GPS/Galileo/BDS系统测距信号精度分析与评价
2018-07-21刘国燕丁艺伟汪登辉
刘国燕,沈 飞,丁艺伟,汪登辉
(1.南京工业职业技术学院 电气工程学院,江苏 南京 210023;2.江苏北斗卫星应用产业研究院有限公司,江苏 南京 210032;3.东南大学 仪器科学与工程学院,江苏 南京 210096;4.东南大学 交通学院,江苏 南京 210096)
我国基于对位置追踪、军事、安全等方面的考虑,自主研发了北斗导航卫星系统(BeiDou Navigation Satellite System,BDS),目前正从区域运行向全球拓展,处于快速发展之中。截止至2016年6月,BDS系统已经成功发射了第23颗导航卫星,计划于2020年前后,完成35颗卫星发射组网,成为覆盖全球的导航卫星系统[1]。测距信号的 精度是保证高精度定位的重要基础,Montenbruck O等通过三频载波相位无几何消电离层组合,初步分析了BDS的GEO/IGSO卫星载波相位观测值误差[2];Yang等通过零基线单差法对BDS系统的三类导航卫星(GEO/IGSO/MEO)的码和载波相位观测值精度进行了评估[3];程鹏飞等从伪距相位差组合观测值和多路径延迟值两方面,对比分析了GPS和BDS卫星的测距信号质量[4];何畅等通过三频无几何消电离层组合及零基线双差法,从载波相位观测值多路径误差及观测精度方面,分析了BDS三频载波相位观测值质量情况[5]。
基于以上研究工作,本文利用零基线双差法对BDS系统3种不同类型卫星的测距信号精度进行评估,对比其与GPS/Galileo系统的测距信号精度,并分析不同类型接收机间的内部噪声水平情况。
1 测距信号精度评估方法
1.1 CDMA信号系统双差观测方程
对于GPS、Galileo、BDS等CDMA信号的卫星系统,载波波长一定,其伪距双差和载波双差观测方程为:
(1)
1.2 零基线双差观测方程
零基线检测法,是将多台接收机通过功率分配器连接至同一天线,接收相同的卫星信号。其中任意两台接收机的观测数据解算出的基线,理论长度为0[6]。
零基线双差检测法消除了卫星钟差、接收机钟差、卫星轨道误差、电离层与对流层延迟误差、多路径误差等,表达式如下:
(2)

(3)

观测值噪声主要是由接收机内部噪声引起的,通过系统间观测值残差的对比分析及基线坐标偏差,可以反映接收机间内部噪声水平情况。
2 实验结果与分析
2.1 实验设备及数据来源
为了验证GPS/Galileo/BDS三系统零基线解算效果,选取Curtin大学楼顶CUT00站下的3组零基线数据进行实验分析。观测时间为2015-01-18,持续观测时间为24 h,数据采样间隔为30 s,观测数据包含GPS/Galileo/BDS三系统双频观测值。3组零基线采用的接收机及天线设备如图1所示。

图1 实验数据设备
采用基线CUT0-CUT2、CUT1-CUT2及CUT3-CUT2 3组零基线数据,对其1 d的观测数据,分析系统间观测值残差及三维坐标偏差。
2.2 观测值残差结果分析
选取CUT0-CUT2组数据,分析观测值残差情况。主要从码观测值残差与高度角的关系、不同系统间观测值残差及不同接收机间观测值残差进行对比分析。
2.2.1 码观测值残差与卫星高度角的关系
选取GPS的G09(BLOCK IIF),画出该卫星出现的时段,将其高度角与L1及L2频段上的码观测值残差的变化情况进行分析,如图2所示。

图2 码观测值残差与卫星高度角的关系
根据图2发现,随着卫星高度角的增大,码观测值残差有随之变小的趋势。可见,随着卫星高度角的升高,接收机噪声对测距信号精度的影响变小,因此,为了提高定位精度,在可见卫星充足的情况下,尽量选择大高度角的卫星可一定程度上减小测距信号精度的损失。
2.2.2 不同系统间观测值残差的情况
考虑不同导航系统及不同类型的卫星情况,分别选取G10、G14、G15、G30、E12、E19、C01、C09、C12共9颗卫星的观测值残差加以分析。由于Galileo可观测卫星数只有12和19号卫星,且观测时间有1.5 h,故均参与该项数据分析。
不同导航定位系统下的各颗卫星的观测值残差分布情况如图3—图4所示,其标准差如表1所示,可以看出:

图3 不同系统下零基线双差载波相位观测值残差分布情况

图4 不同系统下零基线双差码观测值残差分布情况
1)不同类型间观测值残差中,Galileo的IOV卫星观测值残差最小,尤其是E19卫星双频载波相位残差标准差分别为1.0 mm和1.0 mm,双频伪距残差为0.08 m和0.07 m,其次是BDS的IGSO卫星,而GPS系统的BLOCK IIR型卫星观测值残差最大,双频载波残差标准差分别为1.6 mm和2.4 mm,伪距残差分别为0.29 m和0.31 m。
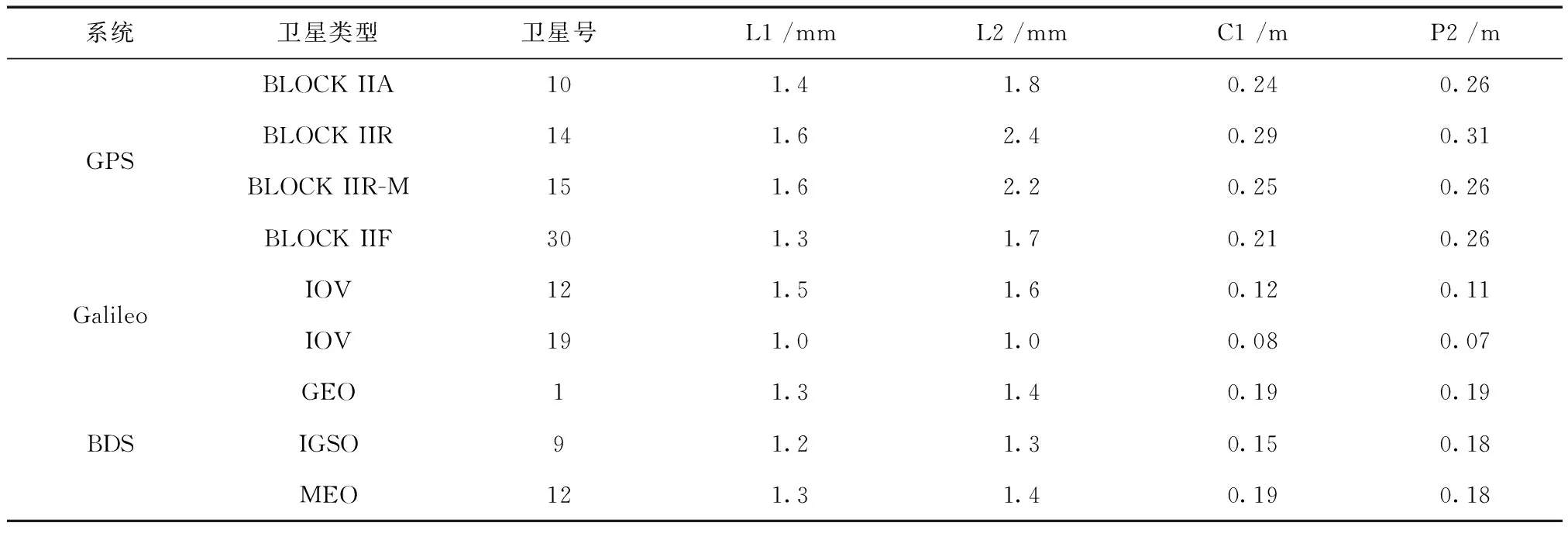
表1 系统零基线双差观测值残差标准差
2)由图3及图4看出,三系统的载波相位观测值残差的变化基本分布在±5 mm,码观测值残差波动范围基本在±0.5 m。三个系统中,L1/E1/B1上的观测值残差略小于L2/E5A/B2上的观测值残差。Galileo系统与BDS系统双频观测值残差差别不明显,GPS系统L2上载波观测值残差明显大于L1上载波相位观测值残差。
3) 通过比较伪距和载波相位两种观测值的残差,看出载波相位测量精度比伪距测量精度高出两个数量级。
2.2.3 不同接收机间观测值残差的情况
选取CUT0-CUT2、CUT1-CUT2两组零基线数据来对比分析美国Trimble公司的NET R9接收机与比利时Septentrio公司的POLARX4接收机,通过分析G14、E19、C09 3颗卫星的载波相位观测值残差和码观测值残差,比较两台接收机的内部噪声水平。
NET R9与POLARX4两台接收机关于G14、E19、C09 3颗卫星的观测值残差大小情况如图5及图6所示,观测值残差标准差分别如表2、表3所示。

图5 两台接收机零基线双差载波相位观测值残差对比情况

表2 两台接收机载波相位观测值残差的标准差mm
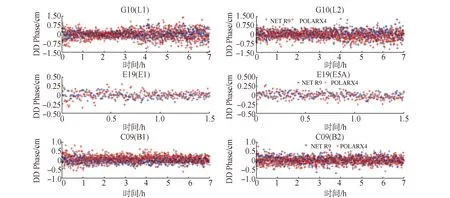
图6 两台接收机零基线双差码观测值残差对比情况

表3 两台接收机码观测值残差的标准差m
就两种距离观测值残差的对比看出,在3种系统下,NET R9和POLARX4接收机的L1上残差值均小于L2上残差值;接收机间对比残差值,发现NET R9接收机得出的残差值较小。
2.3 坐标偏差结果分析
1)实验方案及结果总体情况。该实验分别选取CUT0-CUT2、CUT1-CUT2及CUT3-CUT2 3组零基线1 d的数据结果,计算三维坐标偏差,分为浮点解和固定解两种解算情况,算得三维坐标偏差如图7—图9所示。
相对浮点解,模糊度固定后可以明显提高解算基线的精度。本文分别在浮点解和固定解两种情况下,针对以上3组零基线双差实验,对测得的三维坐标偏差统计标准差,分析其定位精度。
表4中为1 d的观测结果,此表列出了双差浮动解和双差固定解,对于零基线,宜采用固定解的结果。根据图1中提供的信息,CUT0、CUT1、CUT2及CUT3采用相同的天线与信号功分器,分别采用的设备是TRIMBLE NET R9、SEPTENTRIO POLARX4、TRIMBLE NET R9及JAVAD TRE_G3TH_8设备。3组基线N、E、U 3个方向的偏差基本分布在±4 mm,总体不超过±8 mm,标准差不超过2.5 mm。

图9 CUT3-CUT2零基线三维坐标偏差

表4 三条零基线检测结果mm
2)不同基线间对比分析。对于CUT0-CUT2及CUT1-CUT2两组数据,一端连接了相同的设备NET R9(CUT2站),另一端分别采用NET R9和POLARX4接收机。从3.2.3节中对比的这两台接收机的观测值残差看出,NET R9设备的内部噪声水平略低于POLARX4设备,相应的电子学性能也略优。结合此两组基线测得三维坐标偏差分析看出,CUT0站采用的NET R9及CUT1站采用的POLARX4精度相当,测量精度基本相同,表明此两台设备均具有良好的定位精度及较低的内部噪声水平。
对于CUT3-CUT2这组零基线数据,其固定解的三维坐标偏差略大于CUT0-CUT2及CUT1-CUT2,表明CUT3站采用的TRE_G3TH_8接收机的内部噪声水平略大于NET R9及POLARX4设备,但总体偏差基本上不超过±8 mm,仍然具备较好的定位精度。
3 结束语
对于CDMA信号体制的导航卫星系统,本文选取1 d 3组零基线数据,兼容GPS/Galileo/BDS三系统双频信号,利用零基线双差法对其载波相位观测值及码观测值进行系统间不同类型卫星观测值残差对比,比较了不同类型卫星的测距信号精度;通过接收机间残差值的对比,结合基线解析结果,比较了3台接收机的内部噪声水平情况。本文采集了1 d的数据,通过该方法对当时测试环境下特定的设备进行实验分析,得出的结论虽不具备普遍性,但可供借鉴。
[1] 余建斌.中国北斗致力服务全球[N].(2016-06-17).http://www.beidou.gov.cn/2016/06/17/20160617710a2bcd9c9545bb958a633d06355eb5.html.
[2] MONTENBRUCK O,HAUSCHILD A, STEIGENBERGER P, et al. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system[J]. GPS solutions, 2013, 17(2): 211-222.
[3] YANG Y X, LI J L, WANG A B, et al. Preliminary assessment of the navigation and positioning performance ofBeiDou regional navigation satellite system[J]. Science China. Earth Sciences, 2014, 57(1): 144.
[4] 程鹏飞, 李玮, 秘金钟. 北斗导航卫星系统测距信号的精度分析[J]. 测绘学报, 2012, 41(5): 690-695.
[5] 何畅, 蔡昌盛, 赵瑞杰. 三频北斗载波相位观测值质量分析[J]. 测绘, 2015, 38(2): 54-57.
[6] 杜娟, 张会, 刘星, 等. 基于零基线的 GPS/BD2 兼容接收机精度检测方法研究[J]. 舰船电子工程, 2013, 33(7): 121-123.