MHD角速度传感器预处理电路的低噪声设计方法研究*
2018-07-20李醒飞吴腾飞胡亚婷天津大学精密测试技术及仪器国家重点实验室天津30007天津工业大学电工电能新技术天津市重点实验室天津300387
张 云,李醒飞*,吴腾飞,刘 帆,纪 越,胡亚婷(.天津大学精密测试技术及仪器国家重点实验室,天津 30007;.天津工业大学电工电能新技术天津市重点实验室,天津 300387)
以高分辨率对地观测遥感卫星为代表的现代高精度航天器,对航天器姿态角控制的精度和稳定性提出了极高要求。航天器由于受空间环境影响,易产生低幅值、宽频带特点的空间结构微角振动,此种微角振动限制了航天器的姿态稳定度和空间分辨率。基于磁流体动力学MHD(Magnetohydrodynamic)原理的角速度传感器是一种新型传感器,具备宽频带、寿命长等特点,适用于测量高频角振动[1]。MHD角速度传感器特别适用于工程应用,包括美国中继反射镜实验(RME)[2-3]、日本的陆地观测卫星ALOS[4]和美国的静止轨道环境卫星GOESN均使用了MHD角速度传感器提供卫星微角振动信息[5-6]。
国外从上世纪80年代开始对MHD角速度传感器进行研究,美国ATA(Applied Technology Associates)公司研发了一系列型号的MHD角速度传感器[7]。由于国外产品禁运及技术封锁,我国对MHD角速度传感器的研究起步较晚,2008年华中科技大学罗荣峰介绍了MHD传感器的工作原理[8]。2011年,兰州物理研究所霍庆红等人对MHD角速度传感器的内部磁路进行了设计仿真[9]。2013年天津大学于翔[10]、徐梦洁[11]对MHD角速度传感器的工作原理和传感结构分析并进行角振动跟踪实验。2014年,天津大学王丽萍[12]对MHD角速度传感器输出信号的提取方法进行了研究。2015年,天津大学张少强[13]、纪越[14]对MHD角速度传感器的低频拓展进行了研究。2017年,山东科技大学李洪宇[15]对MHD角速度传感器的随机漂移误差补偿方法进行了分析。根据上述研究,MHD角速度传感器能够敏感的微角振动信号幅值范围为sub-μrad至几百μrad,传感器的输出电动势达到μV量级[12],因此设计一款低噪声预处理电路对微弱信号提取十分重要。

本文研究MHD角速度传感器微弱信号提取电路,提出了一种低噪声预处理电路设计。文章第1节阐述了MHD角速度传感器的工作原理及低噪声设计方法,第2节对预处理电路的设计方法进行分析,第3节对预处理电路的噪声模型进行分析,第4节进行实验验证并给出实验结果,第5节进行总结。
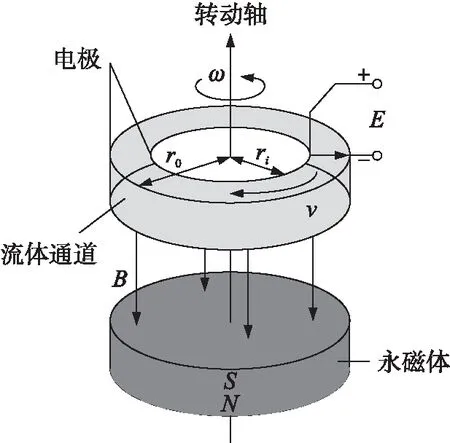
图1 MHD角速度传感器工作原理示意图
1 传感器工作原理及低噪声设计方法
1.1 传感器工作原理
MHD角速度传感器是基于磁流体动力学效应研制而成的。如图1所示,在传感器结构中,下层圆柱体为永磁体,产生垂直方向磁场;上层圆环为磁流体通道。当传感器以角速度w发生转动时,流体由于惯性和流动性与惯性空间保持相对静止,与旋转的磁通量之间形成相对速度,切割磁感线。在流体环的内外壁上产生感应电动势E[18],如式(1)所示,其中:B为永磁体产生的恒定磁场;v为磁流体和壳体的相对速度。
E=vB
(1)
1.2 低噪声设计方法
在低噪声放大电路的设计中,常采取两类指标来衡量放大器的噪声性能,一是放大器的等效输入噪声电压En或噪声电流In;二是放大器的噪声系数F。噪声系数表示一个有内部噪声源的放大器信号传递时的信噪比恶化程度[19],可以用放大器的En-In噪声计算,即:
(2)
式中:Rs代表信号源阻抗;k=1.38×10-23J/K,为玻尔兹曼常数;常温27 ℃时T=300 K;υ1为En和In相关系数,取值为0。通过式(2)可知,当源阻抗一定时,降低放大器的噪声电压En和噪声电流In和使噪声系数F最小是一致的。当前置放大器与传感器进行直接耦合时,可以通过器件选择、工作点调节以及多管并联的方式来降低电路的噪声系数。对于多管并联的电路,噪声模型如图2所示[20],噪声电压噪声电流变化关系如式(3)和式(4)所示。
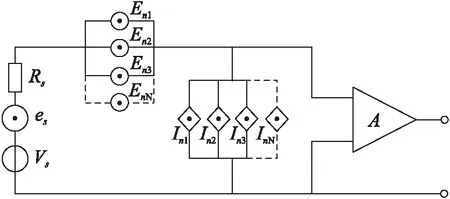
图2 并联放大器噪声模型
(3)
(4)

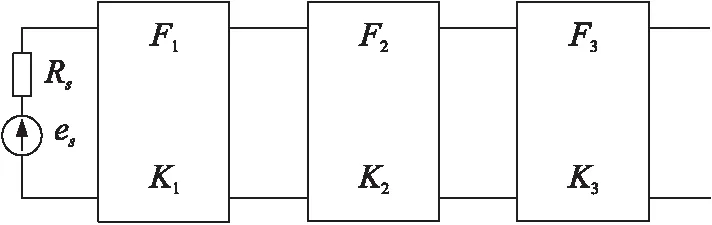
图3 级联放大器噪声系数
由于传感器输出信号在uV量级,预处理电路对输出信号需要进行多级放大,图3所示为多级放大器级联系统,其中F1、F2、F3和K1、K2、K3分别代表各级放大器的噪声系数和功率增益,根据弗里斯公式可以得到级联放大器的总噪声系数为[21]:
(5)
从式(5)可知,在一个级联电路中,各级电路的噪声系数对总噪声系数的影响是不同的。当第1级放大电路的功率增益足够大时,总噪声系数主要由第1级噪声系数决定。所以在多级放大电路中,尽可能提高第1级电路的功率增益,同时选取低噪声放大器件。
2 预处理电路设计
由于MHD角速度传感器的输出信号在μV量级,所以预处理电路需要进行多级放大设计。由1.2节可知,在多级放大电路中,提高第1级的功率增益并选取合适的低噪声放大器件,能降低整体电路的噪声系数和等效输入噪声电压。
由于传感器的工作带宽为1 Hz~1 000 Hz,同时输出噪声与电路的工作带宽有关,所以加入低通滤波器来限制电路的带宽和降低输出噪声。在本文电路设计中,采取二阶有源低通滤波器。
由于运算放大器失调电压的影响,传感器输出的交流信号中会叠加直流偏置电压,使放大器的输出动态范围受限,甚至导致输出饱和。因此,在预处理电路中加入交流耦合电路,其本质是一种积分反馈结构,将输出信号反馈到前置放大器参考端,实现动态调节输出偏置电压。
为了提高信号的抗共模干扰能力和外部电磁干扰的抑制能力,输出端采取差分传输方式,所以在预处理电路中加入单端转差分电路,预处理电路结构如图4所示。
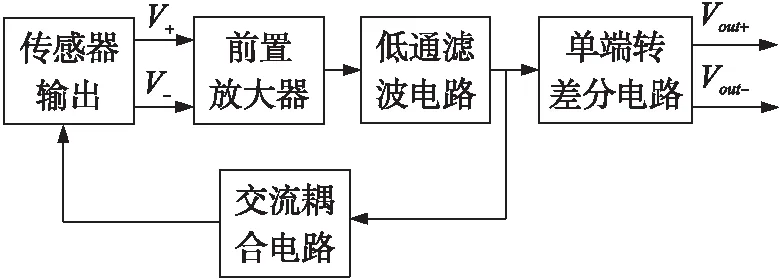
图4 预处理电路结构图
2.1 低噪声前置放大器设计
要使得低噪声放大器的噪声系数最小,不仅需要满足达到噪声匹配,同时也需要选择噪声电压和噪声电流较小器件。集成运算放大器虽然体积小,但是因为在设计中多方面的折中考虑,其噪声特性劣于分立元件。利用集成运放设计的集成电路,其噪声水平通常为晶体管电路的2倍~5倍[22]。晶体管一般输入噪声电压En较小,而噪声电流In较大,适用于源阻抗比较小情况。

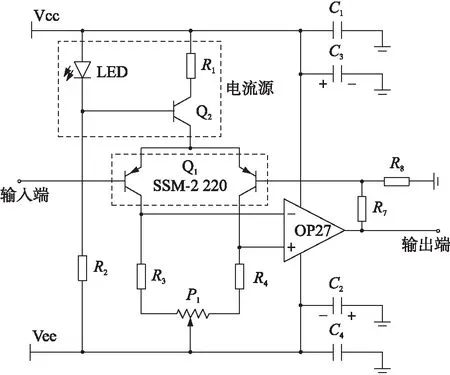
图5 SSM-2220低噪声放大电路
由于SSM-2220晶体管采取共射级连接方式,所以单个晶体管的输入噪声电压为[19]:
(6)

(7)

(8)
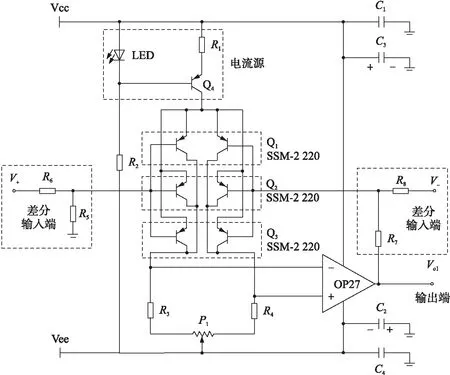
图6 SSM-2220三管并联放大电路
2.2 后级电路设计
后级电路中主要包括低通滤波电路、交流耦合电路和单端转差分电路,电路如图7所示,图6所示的三管并联放大电路可以等效成差分放大器。
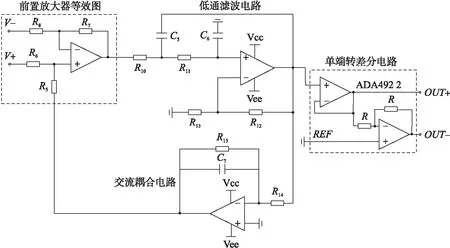
图7 后级电路图
在低通滤波电路的设计中,利用低噪声集成运放搭建二阶压控电压源低通滤波器。在满足传感器正常工作的带宽范围内,限制电路带宽可以降低输出端噪声。根据低通滤波器的电路结构可知其传递函数为:
(9)
交流耦合电路由低输入偏置电流的集成运放和电阻电容搭建构成,其本质为积分电路,低通滤波输出信号加载到积分电路的输入端,输出端反馈到前置放大器的电阻R5端,积分电路在不同频率下具有不同增益,从而构成一个高通滤波器,滤除直流电压,实现动态调节偏置电压[23]。
单端转差分电路采用低失真运放芯片ADA4922,无需外加电阻,电路结构简单,其固定增益A4922为2。所以,预处理电路的总增益为A=A2220×ALPF×A4922=24 500。
3 预处理电路噪声分析
由于低噪声前置放大器的增益为1 000倍,所以预处理电路的输出噪声主要来源于前置放大器的噪声。前置放大器中3个并联的晶体管SSM-2220和OP27可以等效成集成运算放大器,在外围加入电阻构成差动放大电路,电路的噪声模型如图8所示。
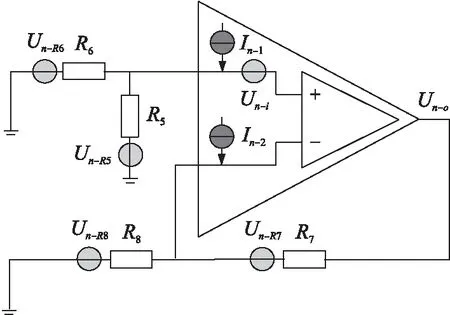
图8 前置放大器噪声模型
从图8可知,电路中的噪声源主要分为三类:输入电压噪声Un-i、电阻热噪声Un-R5、Un-R6、Un-R7和Un-R8以及输入电流噪声In-1和In-2。对于电路输入电压噪声,由于晶体管的1/f噪声较小,故可忽略不计,只考虑宽带白噪声的影响,所以输入电压噪声为:
(10)
(11)
(12)
(13)
(14)
(15)

(16)

(17)
4 实验
将制作好的预处理电路安装到MHD角速度传感器上,利用稳压电源给MHD角速度传感器提供±12 V工作电压,通过NI公司的高速率采集卡PCI-6289采集陀螺的输出信号,利用LabVIEW软件实时显示陀螺转动输出信号,实验平台如图9所示。
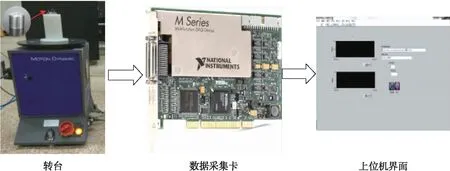
图9 MHD角速度传感器测试图
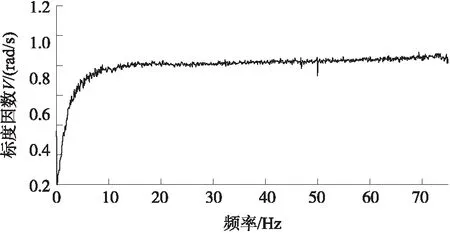
图10 传感器幅频响应曲线
4.1 传感器标度因数测量
在测试传感器的标度因数时,通过给转台不同频率的角速度输入信号,然后利用采集卡采集传感器和转台的模拟输出电压。将采集到的转台模拟输出电压通过转台的标度因数可折算为输入角速度值。利用MATLAB分别绘制二者的电压谱密度曲线,相除即可得到传感器的标度因数,测试结果如图10所示。在低频段,根据传感器表头传递函数式(1)可知,传感器表现为高通滤波器特性;在平坦段传感器的标度因数为0.8 V/rad/s。由于转台最高工作频率的限制,传感器无法工作在整个工作带宽内,所以只能在转台所能提供的频率范围内进行传感器的幅频曲线测试。
4.2 输出直流偏置电压测试
理论上,当预处理电路没有外界信号输入时,电路输出应为零。然而在实际中,由于运算放大器存在失调电压、偏置电流以及外界干扰会使电路输出存在偏置。
测试时,传感器的输入端不加入信号,由于传感器的有效带宽范围是1 Hz~1 000 Hz,所以在 LabVIEW 上位机界面中设置采样频率为10 kHz,采样时间为100 s,对采集数据进行处理,同时与文献[10,17]设计的电路直流偏置值进行对比,如表1所示。从中可知,本文设计电路的直流偏置值要明显小于上述文献设计的电路值。在实验过程中,预处理电路可能由于受外界干扰,例如环境温度改变导致芯片失调电压增大等,使实验值大于仿真值。
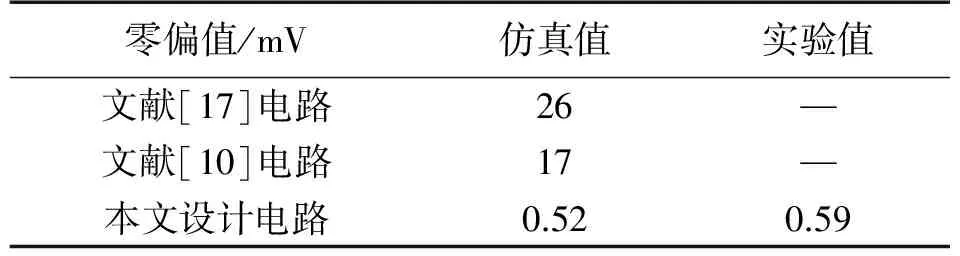
表1 直流偏置电压测试结果对比
4.3 噪声特性测试
测量预处理电路噪声特性时,保持传感器输入信号为零,利用采集卡采集电路输出信号。在MATLAB中利用加窗平均周期图法(Welch法)求取输出噪声的功率谱密度,然后将噪声功率谱密度开方即可得到电路输出噪声电压谱密度,曲线如图11所示。
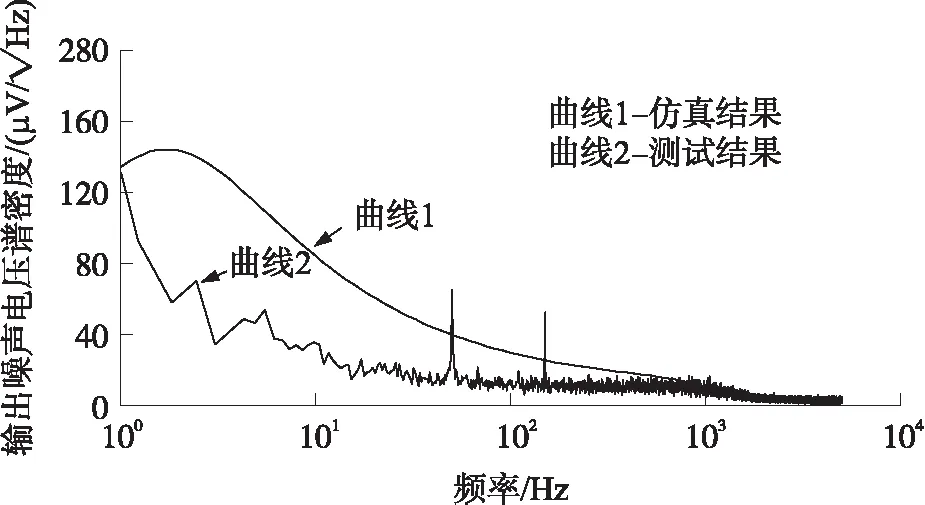
图11 输出噪声电压谱密度曲线
从图11可知,实验测试得到的输出噪声电压谱密度曲线中存在两个较大尖峰,其对应的频率分别为50 Hz和150 Hz,这些尖峰是由于稳压电源50 Hz及其倍频干扰造成的。将测试曲线和仿真曲线对比发现,在低频段实验测试值要小于仿真值,经分析可能是仿真中所用芯片的Spice模型,其设定的电压噪声值要大于芯片手册中给定值,从而会出现仿真值大于测试值。
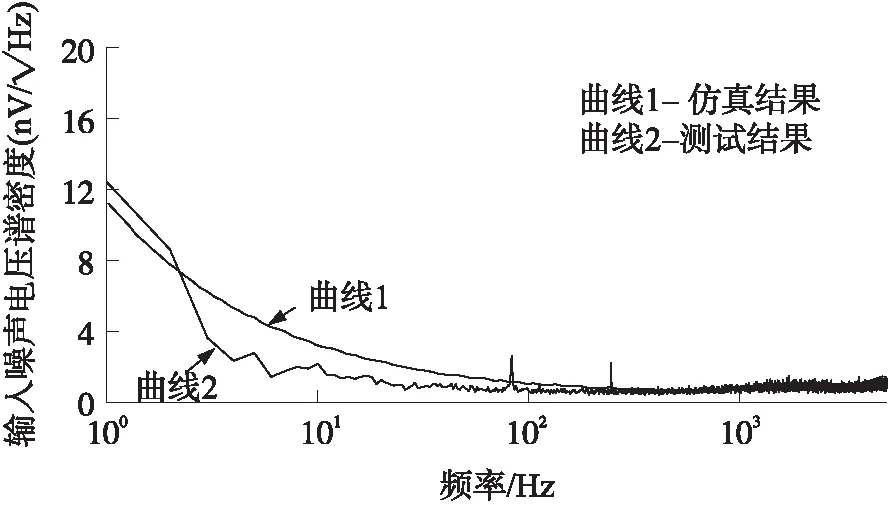
图12 等效输入噪声电压谱密度曲线


(18)
(19)
利用MATLAB对实验数据进行处理得出电路输出总噪声为596 μVrms,大于由式17计算得到的理论值513 μVrms,分析在实验过程中可能由于受外界环境干扰,使其叠加到电路的输出噪声中。
4.4 电路极限灵敏度
电路的极限灵敏度是指电路所能检测到的最小信号,由放大器的噪声系数决定。根据式(3)可知,电路所能检测到的最小信号为[19]:
(20)
n为对于检测的最小信号,放大器输出端所必需的最低信噪比,是由信号处理所需决定,在此取值100,fb为电路噪声带宽。将本文所设计预处理电路的极限灵敏度和文献[10]设计的AD797电路[10]和文献17设计的AD624电路[17]进行对比,结果如表2 所示。从表2可知,电路的等效输入噪声电压越小,噪声系数越小,电路的极限灵敏度越高。本文设计的预处理电路极限灵敏度要高于ATA公司和于翔设计的预处理电路。
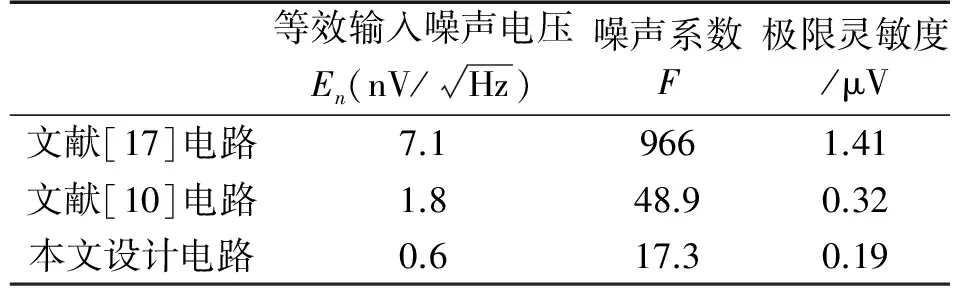
表2 电路极限灵敏度对比
5 结论

