负压吸附式爬壁机器人的体重设计
2018-07-17朱海东
朱海东,高 健
(浙江水利水电学院 建筑工程学院,浙江 杭州 310018)
在一些对国民经济的发展有着重要的作用的工作中必须要采取安全的防范措施,有很多各种各样的爬壁机器人已经被投放到或即将要被投放到各种作业中[1-4].其中,主要被应用在核工业等辐射力比较强的作业中.在建筑行业也有一些工作需要机器人代替工人去作业,比如高层建筑表面的玻璃幕墙清洗、瓷砖等外装饰的安装,外墙壁表面的喷涂和墙面的清洁等,此外还有消防部门、造船行业、石油化工等行业.总之随着科技的发展,机器人将会得到越来越多地应用.
负压吸附式爬壁机器人有着较长的发展历史[5-8].在20世纪60年代,日本就设计出了一台原理样机,其原理为利用小型电风扇的旋转,在与其贴近的墙壁之间产生低压空气,从而产生负压作为吸附力,使得爬壁机器人能克服其重力而吸附在墙壁表面上.自此,负压吸附式爬壁机器人技术引起了许多科研工作者的关注,在世界范围内获得了快速地发展与改进.近些年来,在这负压吸附式爬壁机器人技术领域内,美国、英国等多个国家业已取得了很大的进步;在我国,对负压吸附式爬壁机器人最早的研究,是20世纪80年代末哈尔滨工业大学率先进行的,现经过了20~30年的发展,上海交通大学、北京航天航空大学、上海大学及长春光机所等一些知名的学府及研究所也相继加入研发,都为国内负压吸附式爬壁机器人的研究做出了重要的贡献.
本文着重分析了一般的负压吸附式爬壁机器人的体重问题,考虑到壁面可能存在的倾角,即垂直、倒立及有一定倾角的三种情况,初步给出其体重设计因数,为后续研究提供了有利的参考.
1 负压式吸附技术
自1643年著名的意大利物理学家、数学家托里拆利做了有关大气压力实验,和1654年德国物理学家盖利克做了著名的“马德堡半球实验”以后,人们逐渐开始发现并利用真空现象.所谓“真空”是一种物理现象,指在给定的空间之内低于一个大气压力的气体状态.由此,人们通常把稀薄的气体状态称之为真空状态,把处于真空状态的气体压力与一个标准大气压力相比较的差值的绝对值称为“真空度”.显然,对于真空度,其值越大,则真空度越高,反之,则意味着真空度越低.
负压吸附式爬壁机器人就是制造真空度从而产生负压吸附,其原理简单而言,就是采用旋转风机抽出负压腔内的空气产生负压来实现壁面吸附,具有很强的壁面适应能力.目前,根据不同种类的负压吸附特点,有几类风机得到了比较广泛的开发与使用[9].最早开发的一种负压吸附是径流式离心风扇,其原理是将爬壁机器人吸附腔中的空气甩出产生真空度而形成负压.径流式离心风扇工作时,吸附腔中的空气是从与墙壁接触的密封裙吸入,后又从风扇的四周极速排出,形成最大真空度可达40 kPa的工作负压.
龙卷风式风扇是模拟龙卷风中心气压较低的装置,其风扇旋转时,由风扇吸入的气体流量等于风扇四周排出的气体流量,在爬壁机器人与墙壁之间制造出一个模拟的龙卷风低压区,使得爬壁机器人吸附在墙壁上,这一吸附方式的特点是机器人的吸附腔与外界的墙壁没有直接接触,机器人吸附腔的密封圈与墙壁间的阻力近乎为零.
具体的负压吸附技术,还有真空泵、文丘里器等,它们的共同特点都是制造真空度,形成负压,从而实现爬壁机器人能吸附在工作壁面上.
2 体重设计
负压吸附式爬壁机器人最主要的一个特征,就是机器人可以克服其重力的作用,在垂直、倒立及一定倾斜度的壁面上静止及移动,其体重是首要考虑的问题[10-11].
2.1 垂直体重
对于垂直墙壁,负压吸附式爬壁机器人用于平衡沿垂直方向的重力的是来自其车轮与墙壁之间的摩擦力Ff.这里,负压产生的吸力所起到的作用是产生摩擦力Ff所必须的侧向正压力FN,其方向为沿墙壁法线的水平方向(见图1).

图1 垂直状态受力图
设负压吸盘所产生的平均负压为Δp,即外界气压p0与吸盘内的气压p之差值.令吸盘的横截面面积为S,则由负压Δp产生的吸力为[12]:
Fa=ΔpS.
根据理论力学,摩擦力Ff受爬壁机器人的车轮与墙壁的静摩擦因数μ所限,即满足Ff<μFa.要使摩擦力能平衡重力为G的爬壁机器人,即Ff=G,则有:
G<μΔpS
(1)
在式子(1)中,爬壁机器人的重力G是不许超过静摩擦因数μ、负压Δp及横截面面积S的乘积.
2.2 倒立体重
对于爬壁机器人倒立在天花板上行驶(见图2),那么其重力G不再是由摩擦力Ff参与平衡,而是被垂直向上的负压吸力Fa所平衡,满足的平衡条件为[12]:
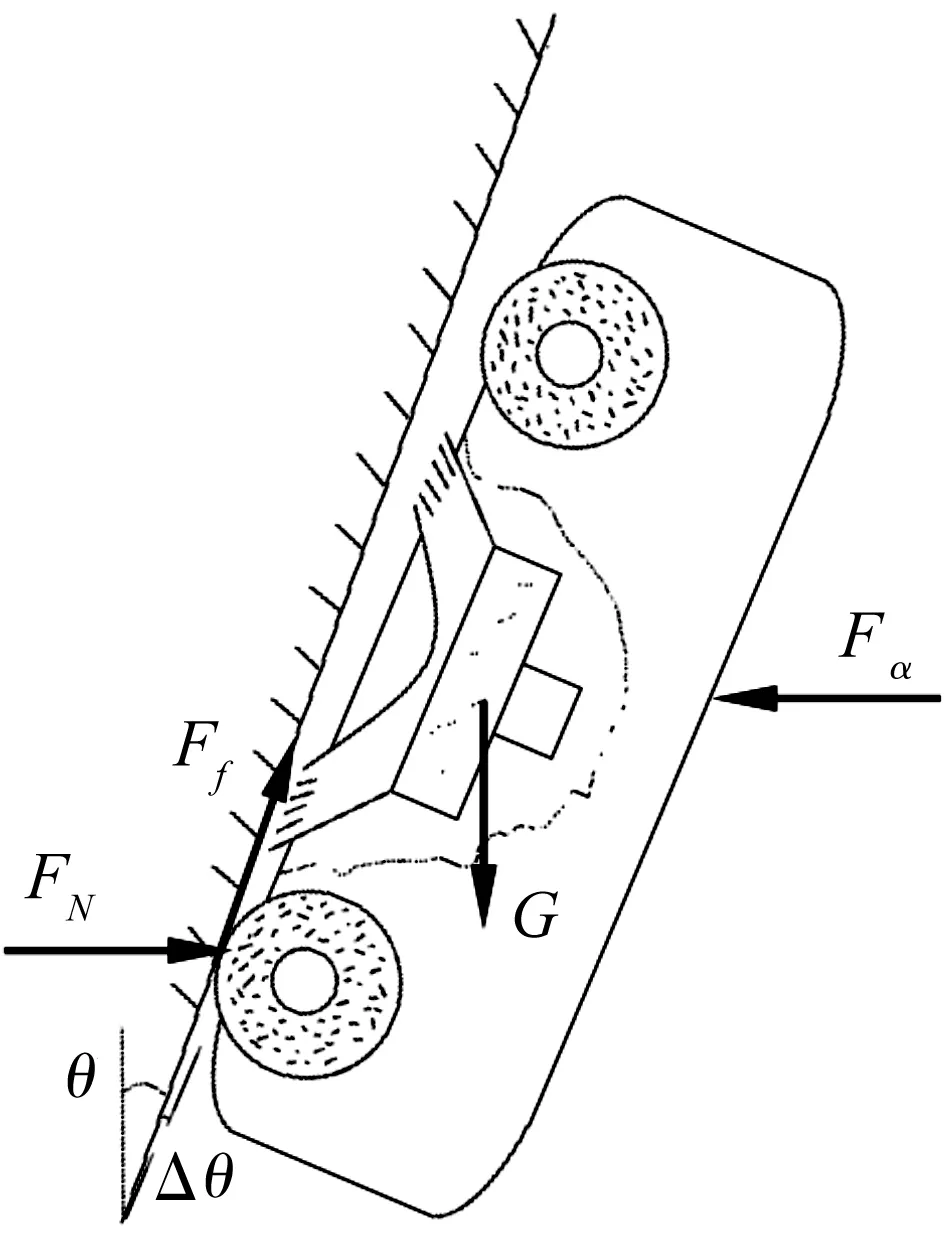
G 即: G<ΔpS (2) 图2 倒立状受力图 对比式子(1)与(2),由于静摩擦因数通常小于1,即μ<1,这时对负压的要求可以降低,可见爬壁机器人在天花板上倒立看起来惊险无比,事实上却要比在垂直壁面作业更容易实现些. 在大于90°的倾斜面上,爬壁机器人最容易出现的状况是前轮悬空(见图3).这个时候,爬壁机器人既需要克服重力,又要防止后翻跌落,即妨碍爬壁机器人稳定作业的力不只有重力,还有由重力引起的后翻力矩. 图3 倾斜状态受力图 当爬壁机器人的前轮由于倾角θ的存在而离开了壁面,考虑到离开壁面的距离较小,由此产生的可Δθ忽略不计,即θ+Δθ≈θ,那么有: G(a+l)sinθ 其中,a为爬壁机器人重心与壁面的间距,l为两轮胎间距的一半.根据实验,这里的Fa=ΔpS/θ,考虑到间距a与倾角θ通常都比较小,即a≈0,tanθ≈θ,则: G<ΔpS/θ2 (3) 对比式子(1)与(3),为了确保安全,当μ<1/θ2时,负压吸附式爬壁机器人的体重设计应首要考虑条件(1),但当1/θ2<μ时,负压吸附式爬壁机器人的 体重设计应首要考虑条件(3).注意,这里所研究的是前轮离开了壁面的情况,与双轮紧贴壁面的垂直与倒立时的情况不同. 本文针对负压吸附式爬壁机器人在壁面上爬行时的三种情况进行分析,爬壁机器人在实际工作中经常遇到倾角不一的运动状态,这些具体情况的分析是相当复杂,本文中所考虑到的情况与方法谨为进一步的研究提供理论参考.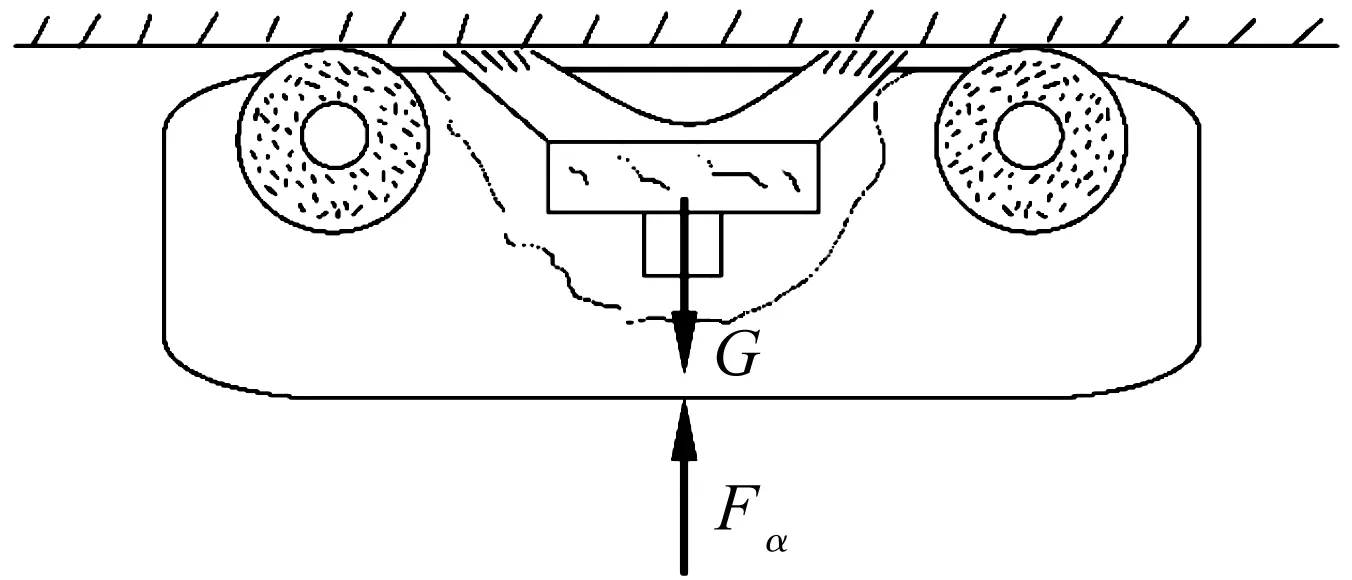
2.3 倾斜体重
3 结 语
