多关节三轴舞龙机器人的设计
2018-07-16林舒静郑誉煌翁柏涛邓国
文/林舒静 郑誉煌,2 翁柏涛 邓国
1 引言
舞龙从过去单一的用来祈求来年风调雨顺的祭祀作用到今天的集娱乐、武术、音乐表演于一身的传统文化活动,它对于传播中华民族传统文化有着不可替代的重要性,因为它自问世以来,一直都在潜移默化的影响这中国人的生活习惯。而在近年来,随着我国科技的快速进步和国家的大力扶持,引发国人对于机器人的研发热潮。由此,研发舞龙机器人有了良好的研发条件。
2 多关节舞龙机器人的设计
2.1 多关节舞龙机器人的设计思路
中国民族传统民俗文化活动舞龙在表演时的特点是龙不断地展示扭、挥、仰、跪、跳、摇等多种姿势。舞龙时应该要实现多轴同步驱动才可以做到舞龙的多种姿势,就是说要达到舞龙表演时的特点就应该通过多台步进电机同步工作才能实现。
2.2 多关节舞龙机器人的机械结构
多关节舞龙机器人的机械结构如图1所示,舞龙机器人分成头、身、尾三部分,舞龙机器人的每一部分都是由一套机械结构控制,一套机械结构是由三个不同的步进电机构成,同时根据不同轴不同的力矩以及位移的要求分别使用不同的步进电机,三台步进电机通过连接器件连接起来,步进电机①控制着舞龙机器人的平移运动,步进电机②控制着舞龙机器人的转动,步进电机③控制着舞龙机器人的摆动同时它还连接操控舞龙机器人的支撑杆。
2.3 多关节舞龙机器人的控制电路
多关节舞龙机器人的控制电路如图2所示。其中开关电源将220V、50Hz的民用交流电源转变成适合步进电机驱动器的24V直流电源。
步进电机驱动器用于控制驱动步进电机,它是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收单轴控制器正转或者反转的脉冲信号,它就驱动步进电机按设定的方向转动,同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的。在本舞龙机器人中,一台步进电机驱动器控制着一台步进电机。
步进电机直接连接舞龙机器人,控制舞龙机器人的实际动作,是舞龙机器人的核心部分。步进电机的运动收到步进电机驱动器的控制,当步进电机驱动器给步进电机驱动器正转信号,步进电机就会进行正转,当步进电机驱动器给步进电机驱动器反转信号,步进电机就会进行反转,所给信号频率越高,步进电机转动的速度越快。
限位开关主要用于将机械位移转变成电信号,当步进电机运动到一定位置时就会触发限位开关,限位开关就会给通过继电器给单轴控制器一个信号,单轴控制就会通过步进电机驱动器,使步进电动机反转。
单轴运动控制器是在舞龙机器人运动到正限位(负限位)时,就会通过限位开关触发单轴控制器,单轴控制器就会给步进电机控制器发送一个反转(正转)的信号,从而达到让舞龙机器人前后移动、左右摇摆以及转头的动作。
舞龙机器人的实物如图3所示。
3 结论
在研发过程中,已经对多关节舞龙机器人进行过多次的测试实验,结果表明本实验中研发的多关节舞龙机器人能够自主运作而且动作流畅,长时间运作后舞龙机器人依旧能够正常的运作,实现了设想中舞龙机器人能够运动的目标,也在一定程度上对舞龙表演进行了动作上的还原。研究以来的多项实验数据表明舞龙机器人投入生产使用是十分有可能的。
多关节舞龙机器人的每一节仅仅只有三轴,运作过程中舞龙的动作设计受到了很大的限制,只能基本做出舞龙的动作,单一的动作未能传神的表达舞龙的精髓,为了可以传神的表达舞龙表演时的精髓,应该将舞龙机器人的轴数增加。同时由于支持舞龙机器人的电机力矩不够,使得舞龙模型只能使用一些较轻的舞龙模型,在支撑重量比较大时的舞龙模型就会出现步进电机力矩不够,不能反转的情况,对于步进电机的选用,应该使用一些轻便,力矩大的电机。总体来说,舞龙机器人的设计不够精美、且动作比较单一,这些地方都是有待改善的。

图1:多关节舞龙机器人的机械结构
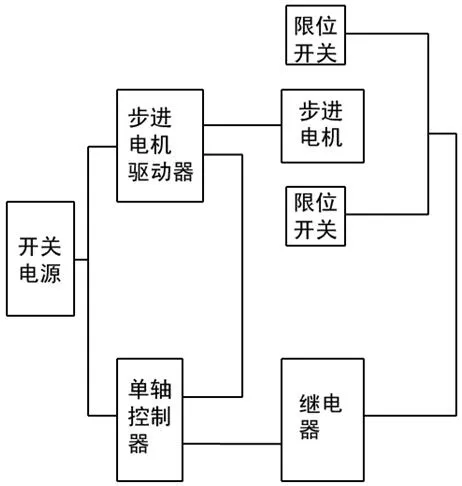
图2:多关节舞龙机器人的基本电路框图

图3:舞龙机器人的实物图