无源性控制在Buck-Boost变换器中的应用
2018-07-16马玉玲
文/马玉玲
1 引言
DC/DC开关变换器属于强非线性的离散系统,一般多采用PID控制方法。常规PID控制存在许多缺点:
(1)闭环系统的动态品质对PID增益的变化非常敏感,需要经常变动PID增益;
(2)它的基本思想是用误差反馈来消除误差,容易导致PID控制的闭环系统中产生快速性和超调之间的矛盾。
所以有必要研究非线性的控制方法在DC/DC变换器中的应用。
与常规PID控制方法相比,无源性控制方法算法简单、容易实现,且是一种全局定义、全局稳定的控制策略,无源性控制对系统参数的变化及外来扰动具有较强的鲁棒性。本文以Buck-Boost变换器为对象,对其进行了无源性分析,并进行了无源性反馈控制器的设计。
2 无源性控制理论
假设系统输入为u(t),输出为y(t),状态变量为x(t),如果存在连续可微的半正定的函数V(x)(称为存储函数),使得

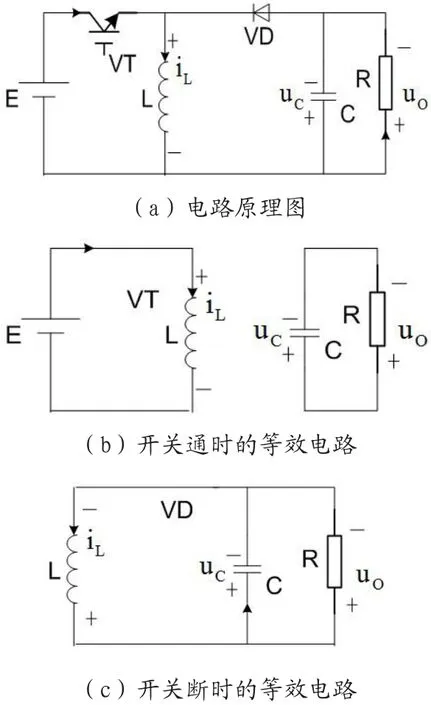
图1:Buck-Boost变换器原理图及其工作状态
如果一系统对于一个径向无界的正定存储函数V(x)是无源的,且是零状态可检测的,则使闭环系统在原点x=0是全局渐近稳定的反馈控制器可以给定为其中为满足的函数。
3 Buck-Boost变换器模型及其无源性
3.1 Buck-Boost变换器建模
图1示出了Buck-Boost变换器电路图以及其在开通和关断情况下的等效电路图。给出Buck-Boost变换器的状态空间平均模型:

其中x1, x2为Buck-Boost变换器电感电流和电容电压;u为开关函数,E为Buck-Boost变换器电源电压;R为负载电阻。
3.2 Buck-Boost变换器的无源性
定义系统的能量存储函数V(x)为:
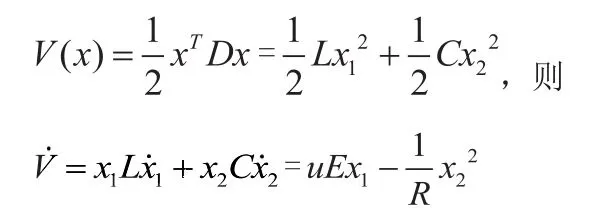
对上式两边求积分得:

因为E>0,所以该系统满足无源性的条件式(1)。
4 Buck-Boost变换器的无源化设计
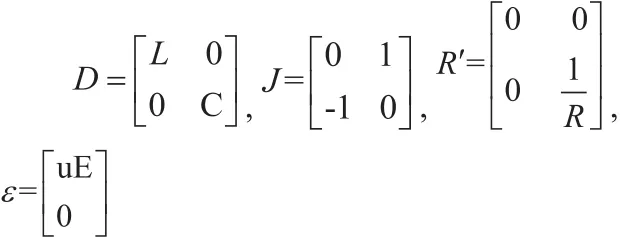
将Buck-Boost变换器的状态空间方程整理成如下形式:

其中:

注入阻尼项:

则(5)式变为:

令(6)式左侧为零,利用李亚普诺夫函数判断系统的稳定性,选择李氏函数为:

整理(6)式右侧方程得到:

这表明:可以通过间接控制状态变量Iref来得到稳定的开关函数u,从而使输出渐近稳定。
5 仿真研究
Buck-Boost变换器元件参数L=100uH,C=200uF,R=50Ω,E=20V,开关频率f=10kHz,稳态时u=0.5,期望输出电压20V。
图2、图3分别为变换器在注入阻尼值为0.8时的输出负载电压响应曲线及稳定后的纹波曲线。由波形可看出,输出电压超调量约为5%,调节时间为0.01s。
在0.08s加入2V的电源电压扰动,在0.08s-0.1s加入负载扰动,输出电压对应的扰动曲线分别如图4、图5所示。
仿真波形表明:在负载发生扰动时,无源性控制能使变换器的输出电压快速恢复到稳定状态,且适当选取注入的阻尼值可减小输出电压振荡,缩短系统调节时间。
6 结论
本文将无源性控制方法引入到DC/DC开关变换器中,以Buck-Boost变换器为研究对象,对其进行了建模及无源化设计,得出了变换器的无源性控制律。仿真结果表明,利用该控制方法提高了系统的响应速度、减小了超调量,增强了系统的抗扰动能力。使得开关变换器可获得较好的瞬态及稳态响应。
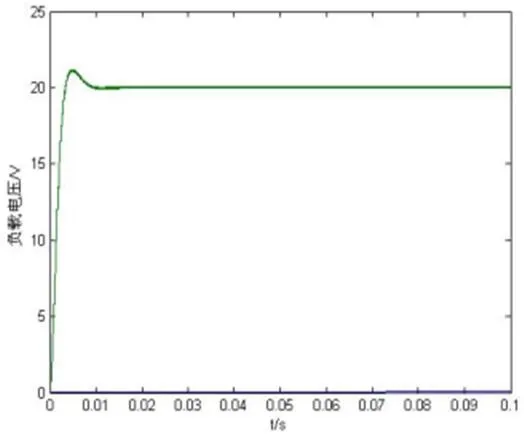
图2:输出电压响应曲线
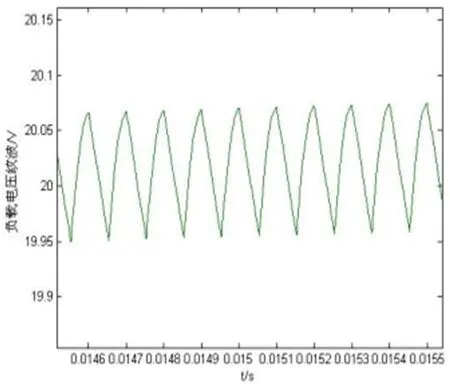
图3:输出电压纹波曲线
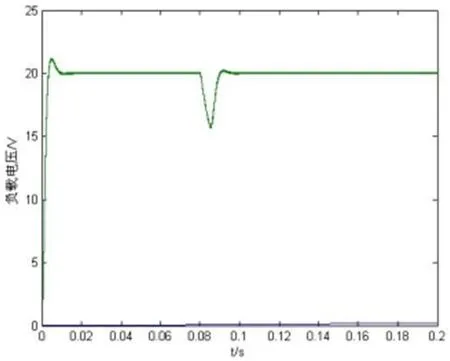
图4:电源扰动时的输出电压响应曲线
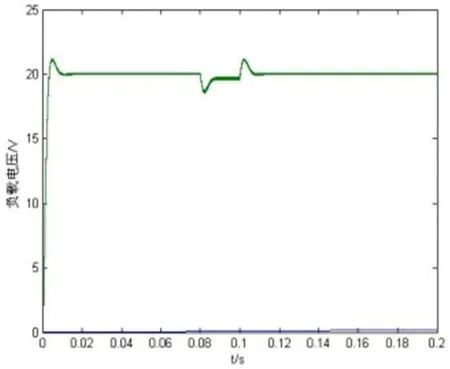
图5:负载扰动时的输出电压响应曲线