城轨塞拉门综合评价方法研究
2018-07-12贡智兵王祖进
贡智兵,王祖进
(南京康尼股份有限公司,江苏 南京,210038)
0 引言
随着城市轨道交通的快速发展,客室车门结构日益复杂,使得客室车门故障诊断的需求显得越来越急迫。因此,为了能够迅速、准确确定故障原因和部位,以最小的劳动消耗,有效地评价客室车门系统故障状况,需要对车门系统的工作过程进行研究,汇总门系统性能的影响指标。门系统的综合评价是通过建立门系统的机电一体化虚拟样机模型,并基于此模型对门系统在多种工况下的运行过程和性能指标进行研究,进而建立综合评价指标体系[1-5],实现对门系统的综合评价[6-8]。
因此,本文采用虚拟样机技术[9-13],基于已建立的机电联合虚拟样机模型[14],对门系统性能的影响指标进行仿真分析,建立门系统的综合评价指标体系,从而建立二级模糊综合评判模型[15]对门系统的性能进行综合评价。
1 门系统性能评价指标体系
已建立的门系统虚拟样机模型如图1所示。
1.1 手动关门力
为测量手动开关门力,在门扇前挡构建Spring弹簧力,通过拖拽弹簧,使弹簧被拉长,由于力的作用是相互的,弹簧拉力传递到门扇,当弹簧大力大于门扇运动阻力,门扇即可运动,通过测量弹簧张紧力即可间接获得门扇开关门过程的动态变化力。
通过对长短导柱上的摩擦系数、电机的静阻扭矩、扭簧刚度对手动关门力的影响程度进行仿真分析,得到如下结论:
1)长导柱上的摩擦系数越大,即门系统在运行方向上的摩擦阻力越大,则手动关门力越大;
2)电机的静阻扭矩越大,则手动关门力越大;
3)扭簧的刚度越大,则手动关门力越大。
1.2 关门防挤压力
关门障碍物检测时的关门防挤压力大小与电机的电流大小有关,电流越大表明防挤压力越大,电流越小则防挤压力也越小。
通过对运动速度和电流限幅对关门防挤压力的影响程度进行仿真分析,得到如下结论:
1)运动速度越大,则电机驱动电流越大,即关门防挤压力越大;
2)电流限幅越大,则电机驱动电流越大,即关门防挤压力越大。
1.3 运动平稳性
对门系统的开关门平稳性进行仿真分析,主要对6个运动阶段进行仿真研究,即:开门启动段、开门加速段、开门到位段、关门启动段、关门加速段、关门到位段。通过改变上述运动阶段参考输入速度的大小,得到不同运动速度下的接触力曲线,对接触力曲线的幅值和波动性进行分析,从而得到上述运动阶段的速度对开关门运动平稳性的影响。
已建立的虚拟样机没有考虑开关门堵转情况,所有还需要对开关门堵转进行仿真分析。在台架立柱与携门架上缓冲头间建立接触,如图2所示。对开门堵转仿真模型进行仿真分析,得到完整的开门过程电机转速与驱动电流曲线,如图3、4所示。
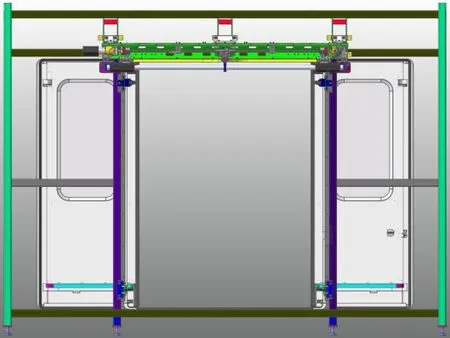
图1 门系统虚拟样机Fig.1 Virtual prototype of the door system

图2 开门堵转仿真模型Fig.2 Simulation model of the open-door blocking

图3 开门电机转速仿真结果Fig.3 Simulation results of the motor speed for opening the door

图4 开门电机电流仿真结果Fig.4 Simulation results of the motor current for opening the door
对关门堵转进行仿真分析,得到电机转速与驱动电流曲线,如图5、6所示。

图5 关门电机转速仿真结果Fig.5 Simulation results of the motor speed for closing the door
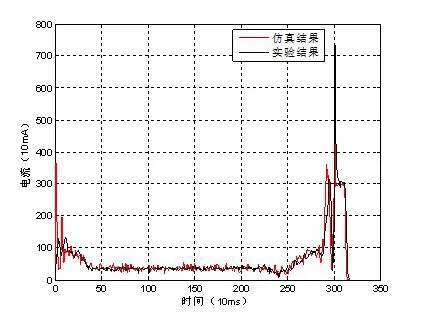
图6 关门电机电流仿真结果Fig.6 Simulation results of the motor current for closing the door
通过对门系统开关门平稳性的影响因素进行仿真分析,得到如下结论:
1)开门启动运动速度越大,则接触力波动越大,即运动平稳性越差;
2)开门加速越快,则接触力波动越大,即运动平稳性越差;
3)开门到位运动速度越大,则接触力波动越大,即运动平稳性越差;
4)关门启动运动速度越大,则接触力波动越大,即运动平稳性越差;
5)关门加速越快,则接触力波动越大,即运动平稳性越差;
6)关门到位运动速度过大或者过小,会导致接触力波动变大,即运动平稳性变差。
1.4 综合评价指标体系
根据上述对手动关门力、关门防挤压力和开关门运动平稳性影响因素的仿真分析,可以建立城轨塞拉门的综合评价指标体系,如图7所示。综合评价指标体系包括3个一级指标:手动关门力、关门防挤压力、开关门运动平稳性,其中手动关门力包括3个二级指标:摩擦阻力、电机静阻扭矩、扭簧刚度;关门防挤压力包括2个二级指标:电流限幅、运动速度;开关门运动平稳性包括6个二级指标:开门启动速度、开门加速速度、开门到位速度、关门启动速度、关门加速速度、关门到位速度。
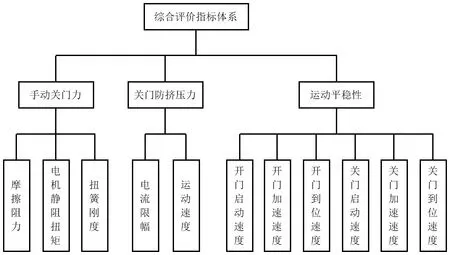
图7 城轨塞拉门综合评价指标体系Fig.7 Comprehensive evaluation index system of the city track sliding plug door
2 门系统模糊综合评判模型
根据上述门系统性能的综合评价指标体系,建立相应的二级模糊综合评判模型。
2.1 确定模型条件
建立模糊综合评价模型前,需要确立评价因素集、评语(评价等级)集和权重集。首先,根据图7,建立二级评价因素集:, 其中:ni为Ui中评价因素的个数。其次,根据评价的具体要求,将评价指标的评价值分成s个等级,即用来表示评语集。然后,确定U和Ui中每个因素在综合评价过程中的重要程度,设U中每个因素相对U的权重集为:同理,确定Ui的权重集为
2.2 计算评价指标的权重
根据对影响因素的仿真分析结果,对上述综合评价指标分配权重,分配结果如表1、2所示。

表1 一级评价指标权重分配Table 1 Weight distribution of the level 1 evaluation index

表2 二级评价指标权重分配Table 2 Weight distribution of the level 2 evaluation index
2.3 评判矩阵
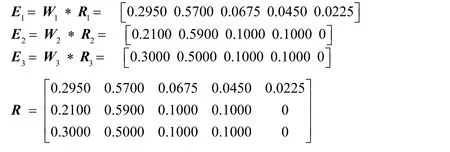
对某一门系统确定评价等级的过程等同于确定门系统对每个评价等级vi的隶属度值的过程。对每一个评价指标Ui进行单指标评价,得出单指标评价矩阵:,其中ini表示Ui中的元素个数,s表示评价等级个数,rij表示指标对评语vi的隶属度。本文采用德尔菲法确定各评价指标对相应评语的隶属度。算出Ui的最终评语:。然后将每个Ui作为单独元素,Ei作为单指标评价向量,构成从U到V的模糊评价矩阵从而得出U的最终评语向量:E =W∗R。
3 综合评价实例
以某个城轨基型塞拉门台架为例,对其进行综合评价。该门系统综合评价指标的具体数值为:手动关门力:140 N;摩擦阻力:0.04;电机静阻扭矩:190 N·mm;扭簧刚度:5.52N·mm/°;关门防挤压力:130 N;电流限幅:1.72 A;运动速度:272 mm/s;开门启动速度:248 mm/s;开门加速度:500 mm/s2;开门到位速度:90 mm/s;关门启动速度:140 mm/s;关门加速度:600 mm/s2;关门到位速度:225 mm/s。
首先,得到各评价指标的权重向量如下:

然后,确定评价标准集隶属度,如表3所示。

表3 评价标准集隶属度Table 3 Membership degree of the evaluation standard set
则可得到:


根据权重向量,可以得出:
最后,将上述评价向量当作第二层的指标评价矩阵,可以得出二级评价结果如下:0.55850.08540.07530.0101],根据最大隶属度评判准则,对该门系统性能的最终评价为较好。
4 结论
基于已建立的机电联合仿真模型,对影响手动关门力大小、关门防挤压力大小、开关门运动平稳性的因素进行了仿真分析,建立了综合评价指标体系,应用模糊综合评判法解决了门系统性能的综合评价问题。在引入实例的基础上,通过量化和科学计算,最终得出了合理的评判结果,实现了门系统的综合评价。