自动控制原理的论述
2018-07-12刘志刚郭锐沈阳工学院信息与控制学院
刘志刚 郭锐 沈阳工学院 信息与控制学院
1 自动控制系统的工作原理
自动控制系统是指能够对被控对象的工作状态进项自动控制的系统,它一般由控制装置和被控对象组成。自动控制系统的组成和工作原理与人体的构成和工作机理有很多相似之处:人体的许多功能可以在不需要有意识的干涉的情况下完成,从而维持我们的生命,如人体的体温恒定调节系统、心跳自动控制系统、自动平衡系统等都是人体内在复杂的控制系统。
2 自动控制系统的基本控制方式
自动控制系统的基本控制方式包括:开环控制、闭环控制、前馈控制、复合控制。
2.1 闭环控制系统
自动控制系统大多都是闭环反馈控制系统,其特点是:输出影响输入,所以能削弱或抑制干扰;可由低精度元件组成高精度系统。
2.2 前馈控制系统
按扰动进行补偿的的,称为前馈控制。系统方框如图1-2所示。这种控制方式的原理是:利用对扰动信号的测量产生控制作用,以补偿扰动对输出量的影响。前馈控制是直接按扰动而不是按偏差控制,干扰发生后,被测量还未显现出变化之前,控制器就产生了控制作用,所以,前馈控制对干扰的抑制要比反馈控制更及时。
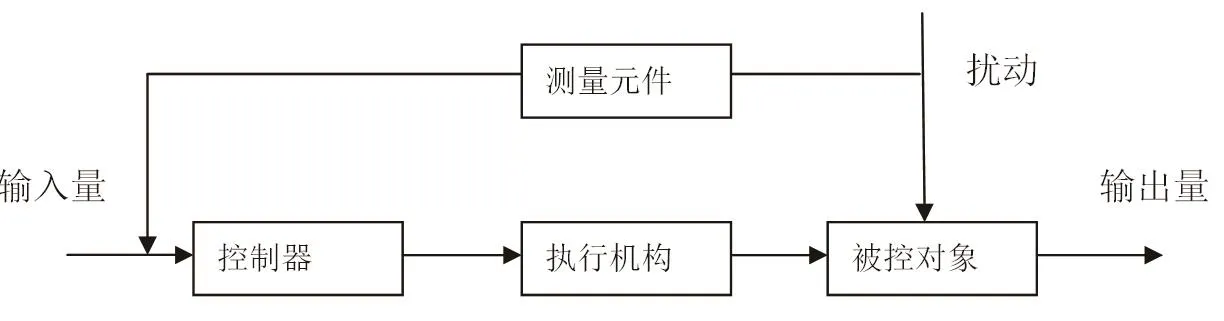
图1-2 按扰动补偿的系统方框图
3 自动控制理论的发展
随着生产的发展,控制技术也在不断地发展,尤其是计算机的更新换代加推动了控制理论不断地向前发展。控制理论的发展过程一般可分为三个阶段:
(1)经典控制论阶段(20世纪50年代末期以前)
经典控制理论,是以传递函数为基础,在频率域对单输入---单输入控制系统进行分析与设计的理论。控制系统的特点 :是以输入输出特性(主要是传递函数)为系统数学模型,采用频率响应法和根轨迹法这些图解分析方法,分析系统性能和设计控制装置。
(2)现代控制论阶段(50年代末期至70年代初期)
现代控制理论,基于时域内的状态空间分析法,着重时间系统最优化控制的研究。控制系统的特点:为多输入---多输出系统,系统可以是线性或非线性,定常或时变的,单变量与多变量,连续与离散系统。
(3)大系统理论和智能控制理论阶段(八十年代兴起至今)
大系统理论,是指规模庞大、结构复杂、变量众多、关联严重、信息不完备的信息与控制系统。智能控制系统是具有某些仿人智能的工程控制与信息处理系统,其中最典型的是智能机器人。 控制系统的特点:是指众多因素复杂的控制系统,如宏观经济系统、资源分配系统、生态和环境系统、能源系统等。
4 自动控制系统的未来展望
控制系统的继续发展的目标是实现高度灵活和高度自动化。现在用的工业用机器人实现了高度的自动化,即一旦程序确定,就不需要更多的人干预了。但这些机器人对于周围的环境无法灵活响应,这也是计算机科学应该着重解决的一个问题。先进的机器人系统通过革新传感器的反馈功能可以达到灵活的目的,通过提高智能化、增加传感器功能、计算机可视功能和离线式CAD/CAM编程功能将使系统更经济且得到更广泛的应用,使控制系统正朝高度自动化方向迈进。对人机对话模式方向的研究和计算机数据库管理等,将使控制更高效、更可靠。降低运行成本和拓宽其应用领域,要求更新人机交流方式和更换编程语言等。
5 结束语
以上是我介绍了自动控制原理的基本原理和基本控制方式,通过对闭环控制系统和前馈控制系统的方框图来突出两种控制方式的特点。之后还指出了自动控制理论的三代的发展和各自的特点,即第一代经典控制理论,第二代现代控制理论和第三代带系统理论和智能控制理论。最后介绍了自动控制系统未来的展望,指出了自动控制理论在工业机器人方面未来的发展趋势。总之,自动控制理论的发展将会给社会所涉及到的各领域带来巨大的贡献,所以我们应该努力学好自动控制理论,但愿将来自己也能给社会带来一番贡献。