一种群目标的可视化分辨方法
2018-07-12李浩正陈颖哲
周 游 李浩正 陈颖哲
(西安电子工程研究所 西安 710100)
0 引言
群目标作为一种彼此间距很小、运动方向和速度基本一致的多目标集合[1],其密集编队飞行方式,在现代战争中已经成为突破敌方防空监视系统的重要手段之一[2]。目前,雷达对群目标的高分辨处理,大多是基于宽带体制下的,主要集中在一维高分辨距离像和二维SAR、ISAR成像两类[3-4]。
但是我国现役警戒雷达多为窄带体制,自身分辨率较低,无法提供足够的信息以实现对群目标的准确判决[5]。将现役雷达更新为宽带体制显然不够现实,因此需要一种方法能够在窄带体制的基础上对群目标进行辅助分辨。
本文介绍的群目标可视化分辨方法以实际观测数据为基础,从信号处理机、数据处理机、雷达终端三部分出发,分别增加辅助处理通道,最终采用两种方法显示群目标,工程实现较为简单,能够满足需求。
1 系统处理流程
本系统为方位机械扫描、俯仰DBF体制,处理流程如图1所示,雷达终端定时给信号处理机发送下个波列的工作参数,信号处理机收到工作参数后,协调6块AD采样板、4块DBF板、定时接口板按指定参数工作,并将最后检测到的目标发送给雷达终端和数据处理机做后续处理和显示;数据处理机收到点迹信息后,根据现有航迹进行匹配,并将每批航迹的最新位置和下一圈预测位置信息上报给雷达终端;当雷达操作手在终端PPI页面中发现可疑群目标的时候,选择其中任意一批目标的批号,将该批目标下一圈的预测值发送给信号处理机,当下一圈天线扫过该预测位置的时候信号处理机上报该位置附近距离单元以及多普勒维的检测信息,从中可以看出群目标中有几个单体目标,及每个目标的距离、多普勒频率、回波幅度信息。

图1 系统数据流图
2 分系统处理流程
2.1 信号处理流程
信号处理的流程如图2所示,天线接收信号经过AD采样转为中带数字信号,后续经过DDC、DBF、
脉冲压缩、MTD、杂波图、CFAR门限检测实现目标信息提取。收到雷达终端下发的高分辨指令以及指定的距离、方位信息后,信号处理机提取出该距离附近25个单元,多普勒频率12个单元的幅度信息,并在下一圈天线扫描过该位置的时候,将数据发送给雷达终端做RF、AR显示。

图2 信号处理流程图
2.2 数据处理流程
数据处理的流程如图3所示,由于信号处理单元检测到的目标是相对天线坐标系的,因此需要首先依据天线机械倾角进行变换,将目标变换到稳定的大地水平坐标系下;经过点迹凝聚、杂波剔除后剩余的点迹如果和已有航迹能够关联,则刷新该航迹的最新位置,同时滤波预测下一圈的位置,并将该批航迹最新位置和预测值输出给雷达终端,辅助实现可视化分辨。
2.3 终端显示流程
终端显示的流程如图4所示,为了保证显示流程,不影响网络接收及其他用户操作,采用DirectDraw方式绘图[6],现对DirectDraw及其绘图主要流程进行介绍。
Windows环境下的显示操作大都采用GDI(图形设备接口)方式,这种方式对图像数据的处理不能直接通过硬件,而是基本完全利用CPU在软件环境下操作,因此大大降低了图像数据显示的速率。为了解决这一问题,Microsoft推出另外一种显示硬件操作接口的多媒体开发库——DirectX,它能够与大多数显卡兼容,并且可以在Windows上直接控制各种硬件(如声卡,输出入装置等),具有更快速,最短延迟,更底层等特点,而DirectDraw就是其中之一,它主要由主表面和离屏表面组成。
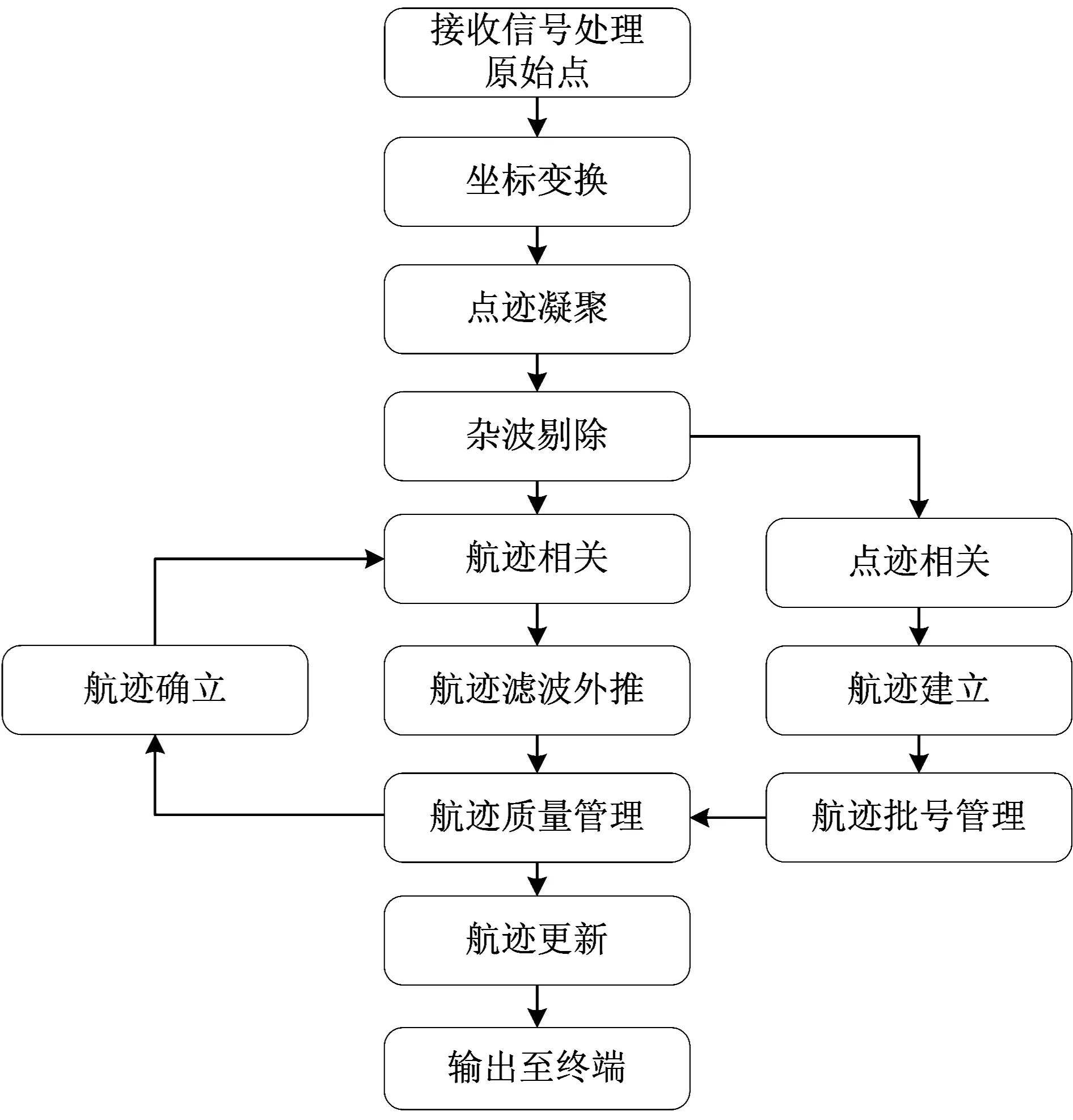
图3 数据处理流程图

图4 终端显示流程图
主表面(Primary Surface)是最终呈现给用户的表面,所有的DirectDraw程序都有且只有一个主表面。主表面由可见主页面和后台缓冲区组成,它们之间可以进行翻转,在翻转的过程中,可见主页面和后台缓冲区对调,翻转之后后台缓冲区变为可见,以前的可见页面则成为后台缓冲区,通过这种方式可以实现平滑、不闪烁的图像快速切换。
离屏表面(Offscreen Surface)是用户自定义的一个可变大小的存储缓冲区,它是一个相对独立的表面,始终是不可见的,在一个DirectDraw程序中,可以有多个离屏表面。离屏表面有助于表面之间的相互切换,从而实现平滑过渡。它通常被用来存储位图,用于将位图图像粘贴到主表面或后台缓存上。各个表面之间的交互如图5所示。

图5 DirectDraw各个页面之间的交互
雷达终端收到信号处理上报的目标周围25个距离单元,12个多普勒单元的幅度值后,默认采用RF方式显示数据,横轴为多普勒频率(F),纵轴为距离单元(R),对每个RF位置根据信号处理机上报的幅度值显示不同亮度的矩形块,幅度值越大,矩形块越亮,亮的个数即为该群目标中单体目标的数目,根据横纵坐标可以查看每个目标的RF参数值;同时设计AR显示方式,横轴为距离单元(R),纵轴为幅度值(A),对不同多普勒频率绘制不同线型的曲线,总共12条曲线,峰值出现的个数即为单体目标数,从峰值线型和R值也可查看该目标的RF参数值。雷达操作手可以通过点击鼠标右键来切换这两种显示方式,以更好地观测群目标。
3 实测结果分析
以下数据为实际试验过程中采集到的,双机编队飞行,该组目标在信号处理过程中被判断为一个目标,因此在雷达终端PPI中只显示一个点迹,当雷达操作手下发高分辨指令以后,处理结果的RF显示方式如图6所示,AR显示方式如图7所示,可以明显看到有两个目标,第一个目标幅度较大,在多普勒维有所展宽,第二个目标幅度较小,二者在距离维相差3个距离单元。

图6 RF可视化分辨效果图

图7 AR可视化分辨效果图
4 结束语
本文针对窄带体制雷达分辨率较低,无法对群目标进行分辨的问题,提出了一种辅助性的可视化分辨方法,该方法通过对信号处理机、数据处理机增加高分辨处理,并在雷达终端增加两种显示方式,方便操作手观察群目标。最后基于某型窄带雷达的实测数据对所提方法进行数据验证。结果表明,该方法可以明显区分群目标,具有良好通用性。
