基于MADYMO/LS-DYNA的耦合功能分析
2018-07-12付荣荣高鹏飞闫晓芳
付荣荣 高鹏飞 闫晓芳
(中国第一汽车股份有限公司天津技术开发分公司)
MADYMO/LS-DYNA耦合分析方法在汽车碰撞分析领域广泛应用。耦合是指将2种软件的特性结合起来,使用户可以在一个仿真中同时使用2种分析软件的特性,满足不同模型特性和不同计算方式的需求。耦合功能结合了2种分析软件各自的长处,给工程师提供了新的分析途径。MADYMO与LS-DYNA软件耦合的好处体现在3个方面:一是丰富的假人和人体模型数据库;二是精确的有限元变形;三是相对较好的时效性。在正面碰撞(偏置碰撞)和侧面碰撞分析中,不少汽车公司也在将其应用到汽车开发流程中[1]。文章主要介绍MADYMO/LS-DYNA耦合功能的应用情况,分析选取行人保护中儿童头部冲击发动机盖板工况作为参照。
1 案例简介
1.1 行人保护头型试验
将试验车调整为正常行驶状态,头型冲击器以(40±0.72)km/h的速度冲击车辆头型试验区域,评价汽车对行人头部的碰撞保护性能。头型试验分为儿童头型试验和成人头型试验,用儿童头型进行试验时,冲击角度为(50±2)°;当用成人头型进行试验时,冲击角度为(65±2)°。在冲击瞬间,头型应处于自由飞行状态,试验点冲击位置偏差应在±10 mm之内。试验中,通过采集碰撞过程中头型3个方向的加速度,计算出HIC15值,来评价汽车对行人头部的碰撞保护性能[2]17。图1示出行人保护头型试验冲击点和目标点位置示意图。

图1 行人保护头型试验冲击点和目标点位置示意图
1.2 头型冲击器
儿童头型冲击器为铝制、均质结构、球形,直径为(165±1)mm,质量为(3.5±0.07)kg。相对于过质心且垂直于冲击方向的轴的惯性矩为0.008~0.012 kg·m2。包括仪器的头型冲击器的质心应位于球的几何中心,偏差为±2 mm。球体用(14±0.5)mm厚的合成皮肤覆盖,覆盖面积至少为球体的一半[2]13。
冲击时头型速度为(9.7±0.2)m/s(35 km/h);冲击方向应在汽车纵向垂直平面内,相对于水平面的试验冲击角度应为(50±2)°;试验冲击方向相对于前部结构应向下和向后。
2 耦合模型准备
2.1 LS-DYNA车体模型
选用纯LS-DYNA文件中的车体模型,纯LS-DYNA模型中包含LS-DYNA车体模型和LS-DYNA头部模型。制作耦合模型的车体模型需要在前者基础上删除发动机盖外板的质量点,删除LS-DYNA头部模型和头部模型的相关定位线,只保留车体结构。
2.2 MADYMO儿童头部模型
儿童头部模型选用JARI_ChildHeadform。初始的儿童头部模型是欧标设置,比如头部冲击角度为60°,冲击速度为11.1 m/s。当在MADYMO中调用之后需要进行修改,通过设置ORIENTATION.SUCCESSIVE_ROT,设置冲击器沿Y轴旋转0.872 rad,相当于冲击角度为50°;通过设置INITIAL.JOINT_VEL,设置头部冲击器的冲击速度为9.7 m/s。
2.3 儿童头部模型定位
在纯LS-DYNA模型中测量头部尖端坐标位置,并记录数据。然后在MADYMO模型中按照此位置在全局坐标系下进行头部定位(注意不是局部坐标系),设置头部的 POS为(0.97,-0.58,1.762)。
3 耦合模型的设置
3.1 耦合卡片设置(*CONTROL_COUPLING)
因为LS-DYNA和MADYMO常用的单位制不同。LS-DYNA 中常用的是 mm,s,kg;MADYMO 默认使用的是国际单位m,s,kg。添加卡片*CONTROL_COUPLING用于单位制转换,其卡片截图,如图2所示。图2中UNLENG设置为1 000,代表LS-DYNA中的长度单位除以1 000,由mm转换为m,时间和力的单位没有变化。

图2 耦合模型单位制的转换截图
3.2 接触耦合(*CONTACT_COUPLING)
接触耦合定义的是可能和MADYMO发生接触的LS-DYNA模型,在这里定义的部件都会显示在KN3文件中,为了后处理的显示效果,可以加上不涉及接触的部件,以增加视觉效果。文中新建car_head_groups,仅添加发动机盖外板零件到此group。如果为了效果更好,可以添加发动机盖内板及有可能和内板发生接触的部件。当耦合完part之后,如果需要对其他设置进行修改,可以只在MADYMO中进行设置和操作,方便快捷。
3.2.1接触类型选择(*CONTACT_METHOD)
LS-DYNA与MADYMO耦合计算中采用的是MADYMO接触算法,文章中头部与机盖接触属于CONTACT.FE_FE接触类型,属于弹性接触模型。
在 MADYMO中有弹性(ELASTIC)和运动学(KINEMATIC)2种接触模型。弹性接触模型适用于所有可能的接触,并且接触面可相互穿透,相应的弹性接触力依赖于穿透量。在弹性接触模型中,有2种模型可用来计算接触力:接触力模型(CONTACT MODEL FORCE)和接触应力模型(CONTACTMODELSTRESS)。接触力模型有3种:基于罚函数法(PENALTYBASED)的接触、基于自适应(ADAPTIVE BASED)的接触及基于弹性特性(ELASTICCHARACTERISTICBASED)的接触。通常情况下,惩罚(PENALTY)和适应(ADAPTIVE)接触力对一般FE模型接触都可以得到好的结果,2种方法的CPU效率是一样的。惩罚力依赖于主接触面的BULK刚度,如果主接触面的BULK刚度比较小(比如FOAM材料),默认的惩罚参数值就不能得到好的结果,需要增加惩罚参数的值。在这种情况下,用户使用CONTACT_FORCE.ADAPTIVE就会显得比较简单。
为了对标更加准确,该设置可参考纯LS-DYNA中的设置,相关参数也参考纯LS-DYNA中的设置。文章中纯LS-DYNA模型中选用的CONTACT_METHOD是SURFACE_TO_SURFACE(基于材料特性),CONTACT_FORCE.ADAPTIVE,摩擦因数为0.03。
3.2.2接触定义(*CONTACT SPECIFICATION)
主从面选择需考虑的因素有表面刚度、网格相对密度、表面曲率及深穿透。一般将刚度最小的面、相同或更密的网格,或曲率较大的面作为从面。所以选用儿童头部模型作为从面,发动机盖外板作为主面。
3.3 其他需要注意的设置事项
1)LS-DYNA和MADYMO最好设置相同的结束时间,如果两者不一样,则会在最短的那个时间段结束仿真。文章参考LS-DYNA中的设置(0.01 s)。
2)LS-DYNA和MADYMO中的动态时间步必须一致。在纯LS-DYNA模型中DT2MS(步长)设置为-9E-07,TSSFAC(缩放系数)设置为 0.9。参考纯LS-DYNA模型中步长的设置,如果步长为负值,为了防止质量无限缩小,则计算时的步长=TSSFAC*|DT2MS|,即步长不小于9E-07*0.9=8.1E-07,文章的步长设置为9E-07。
3)LS-DYNA和MADYMO中指定使用的CPU必须一致。
4 耦合流程
4.1 详细的耦合流程设置[3]
1)Project设置。创建耦合文件Pedestrian.cpr并选择保存工作位置。
2)Model设置。导入需要耦合的LS-DYNA模型和MADYMO模型文件,LS-DYNA的长度单位由mm转换为m,把Units板块中的Length设置为mm,Time设置为s,Force设置为N,与MADYMO统一单位。
3)Position设置。在MADYMO模型中已经对头部位置进行了定位,所以此处不再进行设置,默认即可。
4)Coupling设置。一般MADYMO软件的设置会自动导入,在此只需要设置LS-DYNA的接触组和LS-DYNA与MADYMO的耦合接触。Method选择Surface To Surface,Force 选择 Adaptive,Friction Value设置为0.03,Reduction Factor和Max Force Par设置为默认值,最重要的是Gap Type选择Func形式,并设置为0.003[4]。耦合接触的设置,如图3所示。

图3 耦合接触的设置显示界面
5)输出耦合模型文件。耦合完成之后会输出2个文件,一个是耦合之后的LS-DYNA文件(Pedestrian.xml),另一个是耦合之后的MADYMO文件(Pedestrian.k)。
6)提交计算。对耦合的2个文件分别进行计算,如果出现error,则进行修正,直到计算正确。同时再对纯LS-DYNA模型进行计算。耦合文件用时43min,纯LS-DYNA文件用时58min。
4.2 结果验证
对计算结果进行提取,提取头部加速度曲线,并导入HyperView中。HIC15值用于评价汽车对行人头部的碰撞保护性能,对头部加速曲线进行HIC15值的提取。
纯LS-DYNA中HIC15的值为540.492,耦合模型中HIC15的值为565.923,相差0.05%,如图4所示。图5示出头部损伤曲线的相关性,相关率超过95%。通过图4和图5可以看出,耦合效果较好。

图4 头部损伤曲线的分析对比图

图5 头部损伤曲线的相关性图
4.3 正面碰撞耦合分析
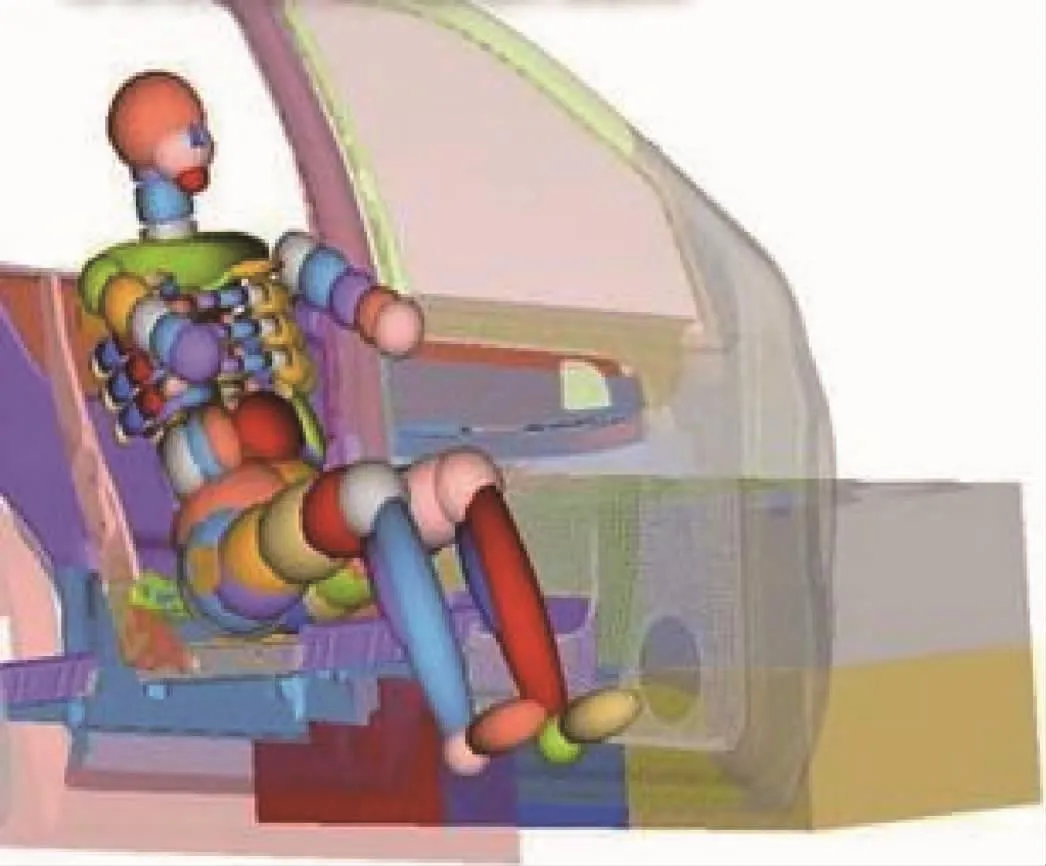
文章描述的只是简单的耦合实例,只涉及了耦合接触,其他参数都是在各自的软件中设置。正面碰撞耦合分析包括车体BODY的耦合、安全带与车身的耦合、座椅与车体的耦合、管柱BODY与车体的耦合,以及加速踏板与车体的耦合等。一般MADYMO模型和LS-DYNA模型中分别设置运动的初始速度,假人在MADYMO中设置Z向重力加速度。当车体BODY和管柱BODY与车体耦合(CONSTRAINTS MADYMO BODY设置)的时候,尽量多选节点,可以选择左右两边梁的全部节点,以防止拉力过大而变形。安全带与车身耦合时,也尽量多选择节点,防止变形过大。当假人与车体接触设置时,一般车体作为从接触面,刚体假人作为主接触面,接触特性参数的设置参考非耦合模型。图6示出耦合完成的汽车正面碰撞模型,为了显示内部,隐藏了车门和玻璃模型。耦合模型一旦建立,如果需要改动,只要不涉及耦合group,改动或调整均在各自的耦合文件中进行。由于采用MADYMO多刚体假人,避免了有限元假人的负体积问题,同时大大提高了计算效率。

图6 汽车正面碰撞的耦合模型图
5 结论
行人保护头部冲击发动机盖板的耦合分析与纯LS-DYNA模型计算效果相同,且用时较短。无论是做正碰(偏置碰)或者侧碰分析,采用多刚体假人都避免了因为负体积错误导致计算中断的问题,耦合计算模型继承性很好,其乘员约束系统模型建好后(GENERAL MODEL)进行少许改动就可以用于其他车型,在此基础上进行新车型开发研究,对汽车开发初期大有好处。
