电动汽车充电站智能巡检机器人系统研究
2018-07-11单蕾瑾余志慧戴咏夏章丹竺
单蕾瑾, 余志慧, 戴咏夏, 章丹竺
(1.国网浙江省电力有限公司杭州供电公司,杭州 310009;2.杭州市新能源汽车服务有限公司,杭州 310012)
0 引言
随着我国社会的不断进步和发展,我国的汽车保有量不断增加,在国家新能源汽车政策鼓励和支持下,电动汽车充电站和充电桩等配套设施建设也迎来快速发展。2010—2016年,中国充电站保有量从76座增长至5 600座,年复合增长率达104.8%,公共充电桩数量从1 122个增长至15万个,年复合增长率达126.1%。发展新能源汽车,特别是电动汽车,对于能源、环保等领域都具有重要意义,而充电基础设施的建设完善则是电动汽车普及发展的必要保障。但在充电设施大力建设和运营过程中面临着充电桩分布范围广、管理维护困难、缺乏有效监控、充电车位被占用、充电桩被恶意破坏等问题,成为阻碍电动汽车发展的重要因素。
目前,大多数充电站通过安装摄像机及探头的方式,对站内的环境、充电桩的运行状态及充电车位的使用情况进行监视。虽然提高了站内人员对站内整体运行状况的掌握,但仍然不能及时发现充电桩的运行故障及充电车位的占用问题[1-2]。
因此,针对目前充电站运营中存在的问题,结合充电站实际情况,研发1套适应于一般充电站环境、具有高防护能力和可靠性的充电站轨道机器人系统,完成对充电站的智能巡检,可以使站内工作人员实时掌控充电站充电桩及车位的状态信息,提高充电站运营的安全可靠性。
1 轨道智能巡检机器人系统
轨道智能巡检机器人系统基于架设的轨道,实现的自主导航、精确定位、智能巡检的移动平台,集可见光、红外、声音等传感器于一体,实现对充电站内充电桩的在线监控,将被检测设备的视频、声音和红外测温数据通过无线网络传输到监控室;监控后台系统通过设备图像处理模式识别等技术,结合设备图像红外专家库,实现对设备缺陷、运行状态、外观异常的判别;并配合智能车位锁管理系统对充电车位智能管理。
1.1 系统组成
充电站轨道智能巡检机器人系统为网络分布式架构,如图1所示,整体可分为3层,分别为基站层、通信层和终端层。基站层由后台监控机、监控后台软件及数据库组成;通信层由电力载波仪、交换机等组成;终端层为充电站内的轨道机器人及其附属设备和充电桩的监控终端。
轨道机器人沿轨道巡检获得的检测信息通过电力载波仪、交换机、光电转换器等传至充电站内的监控室中,在本地完成对机器人运动状态的控制和充电桩运行状态的智能巡检。
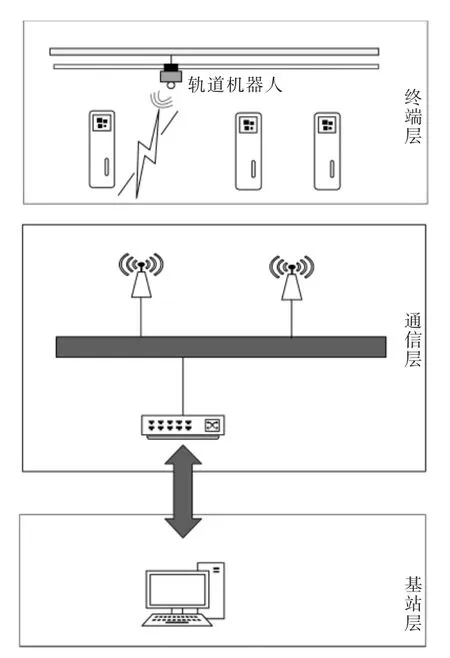
图1 轨道机器人系统整体架构
1.2 系统功能
充电站轨道智能巡检机器人系统具备在线监控、检测功能、巡检功能、分析处理功能和智能车位管理功能。此外,还具备自主避障功能,保障轨道机器人运行的安全性。
1.2.1在线监控
通过监控后台在线监视轨道机器人的运行状态,在线监视充电桩的运行状态、温度及充电车位使用情况;巡检人员可在监控后台控制轨道机器人进行充电站内设备的巡视;可对机器人本体、云台及检测设备进行手动控制;实现充电站内设备巡视的本地及远程控制功能。
1.2.2检测功能
检测充电站内充电桩的外观、温度及充电车位的使用情况;检测充电站内火灾的发生情况;通过机器人沿L型轨道的运动,对充电站内设备的全方位、无死角智能巡检;通过视频服务器将采集到的信号传输至后台分析软件进行处理。
1.2.3巡检功能
巡检机器人按预先规划好的任务路径沿轨道行驶对充电站内的设备进行例行巡检;手动控制巡检机器人到达指定位置进行特殊巡检;自动调整云台的角度和方向,拍摄检测点的高清图像。
1.2.4分析与处理功能
自动分析巡检过程中拍摄的检测点图像,识别检测点设备的状态数据;自动智能分析设备故障或缺陷,根据分析结果自动报警,协助巡检人员判别设备的故障;根据巡检结果数据生成巡检设备报表。
1.2.5智能车位管理
检测充电车位是否有车辆存在;车辆占用车位,不进行充电或充电完成未在规定时间内离去,则告警提示用户离开;充电桩终端智能控制车位锁的起落,提示用户充电或离开充电车位。
其中在线监控、检测功能和巡检功能已在电力系统变电站中智能机器人巡检系统中得到了广泛应用[3-6]。
1.3 分析与处理功能
1.3.1红外测温与故障诊断
以非接触测温为基础的红外诊断技术在电力系统得到了广泛应用,但是,目前主要使用的红外热像仪以手持形式为主。使用手持红外热像仪进行电力设备诊断时,一般需要预先录下关注点的图像,然后带回实验室进行离线分析,这样并不能实现实时检测和及时发现问题[7-8]。
该系统采取在线式红外热成像装置,包括红外图像采集装置、红外图像处理模块、图像显示、存储、查询和报表生成模块。系统可根据预先设定的充电设施正常运行的温度阈值和红外装置采集的红外图像,自动进行判断,对超出报警值的设备在监控中心主控计算机上给出声音和文本报警;借助红外热像和红外图谱识别,能判断一些关键设备的内部温度梯度,可以形成某一时刻充电站的某一充电设备的温度曲线,也可以生成某一设备在一定历史时间内的时间的温度曲线,从而可分析充电设施是否可能会发生故障。
1.3.2可见光图像监测与故障诊断
在一般的充电站图像监测系统中,特定的图像经摄像机和采集卡输入到视频服务器中,经压缩后传输到监控中心,监控中心同时显示多个充电站的站内所有设备的实时图像,运营人员通过人工分析判断充电设施的运行状态。
该系统可在无人值守充电站先利用轨道机器人系统到达指定检测点拍摄待检设备关键区域的可见光图像,并将图像发送给监控中心的监控后台中进行图像分析,在分析过程中首先对采集的图像进行预处理,识别出被监测的电力设备,通过将该图像与上次采集的图像进行差图像分析、累积图像分析、相关分析、区域标识、纹理描述和评判等处理,结合对应设备的参数库确定其是何设备,如果是仪表则识别出读数。如果处于正常状态则切换摄像机采集和分析下一幅图像,如有畸变发生则存储结果,并且监控后台发出告警信息,提醒运营人员发现设备故障。运营人员也可查询数据库中存储的某设备图像分析结果,了解某时间段内此设备的运行情况,提前预判此设备需要检修的时间,降低设备故障运行的发生率。
1.4 智能车位管理系统
针对充电车位被非充电车辆占用及充电车辆不及时离开的问题,系统中的智能车位管理系统功能可用于充电桩状态、参数的监测以及智能停车位管理,以解决充电车位的占用问题。
通过充电桩厂商提供相关通信数据传输接口读取充电桩的状态、电压、电流、温度等数据。数据传输接口使用网口,采用TCP(传输控制协议)。充电桩、充电桩和车位锁监控设备、站级监控主机、交换机通过网线相连接。车位锁、充电桩和车位锁监控设备通过485总线相连接。车位锁无车落下按钮、充电桩和车位锁监控设备通过开关信号线相连接。在桩内监控设备与桩体及车位锁监控设备通信过程中,充电桩内部监控设备为客户端,桩体及车位锁监控设备为服务器端。在桩体及车位锁监控与站级监控通信过程中,桩体及车位锁监控为客户端,站级监控作为服务器端。智能车位管理系统网络架构如图2所示。
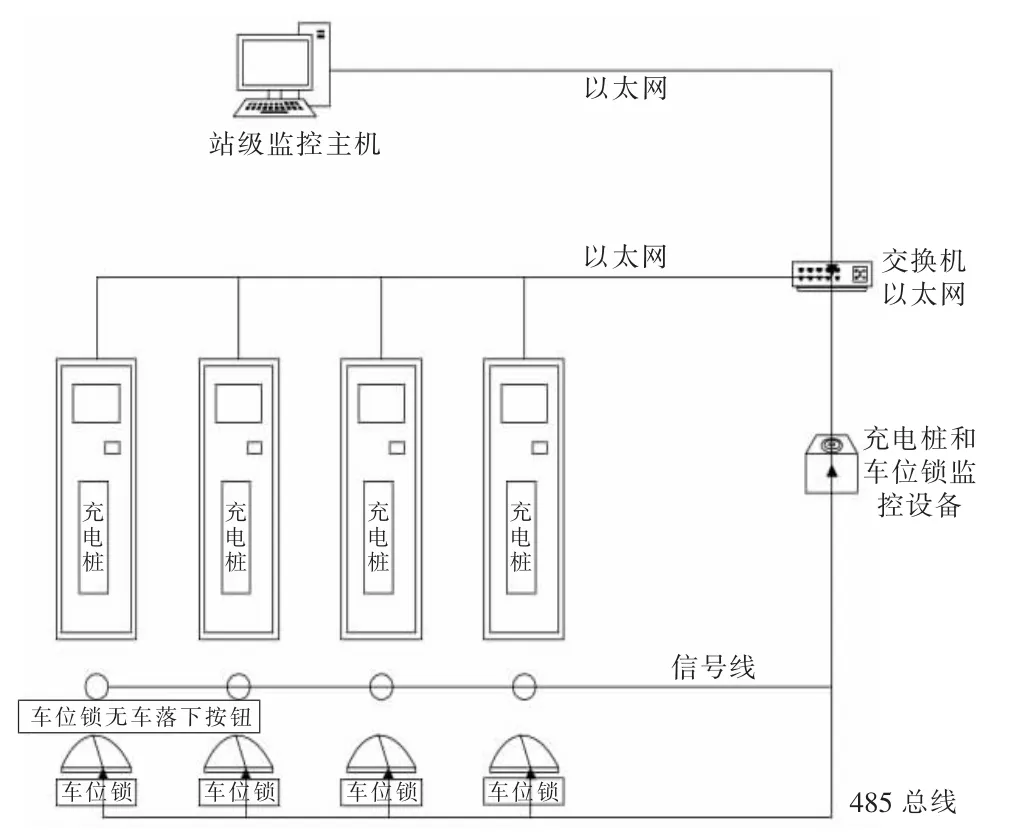
图2 智能车位管理系统网络架构
1.4.1充电桩桩体监控功能
充电桩桩体监控主要为了方便运营管理人员及时了解监控充电桩的运行状态、参数,降低人工巡视工作量,为充电桩的安全有序运营提供保障。
充电桩桩体监控由站控层和间隔层两部分构成,采用分层、分布、开放式网络系统实现连接。1台充电桩发生故障而停运时不影响其他充电桩的监控。站控层由计算机网络连接的主机构成,提供站内运行的人机界面,实现管理控制间隔层设备等功能,形成全站充电桩的监控管理中心。站控层设备集中布置于站内监控室内。间隔层由充电桩监控单元、自动化终端、间隔层网络设备、通信接口设备构成,完成面向单元设备的检测控制功能。站控层采用基于TCP/IP协议的10M/100M高速以太网作为通信网络,间隔层采用实时、可靠、抗干扰性能好的现场总线。具备合理的网络架构和信息处理机制,保证在正常运行状态及事故状态下不出现因网络负载过重而导致系统死机或严重影响系统速度的情况。
充电桩桩体监控系统的主要功能有:充电桩参数状态监控、智能车位锁状态监控等功能。充电桩参数状态监控监视的主要参数有:充电桩桩号、充电桩当前状态、充电枪连接状态、充电电压、充电电流、充电桩温度、充电枪温度、充电停止原因、当前故障报警状态、电池组最高温度、电池组最低温度、SOC(荷电状态)等。智能车位锁状态监控监视当前车位锁处于升起还是落下状态,监视车位中是否有车,控制车位锁落下/升起等。
1.4.2智能车位管理功能
智能车位管理系统为规范用户现场停车管理,发挥充电车位最大作用,防止充电车位被社会车辆随意占用的问题。
智能车位管理系统包含站级监控部分和桩侧监控部分。站级监控部分通过与充电桩监控设备通信远程监视当前车位锁状态、遥控车位锁升起落下。桩侧监控部分通过充电桩监控和各种传感器智能监视控制车位锁升起落下,由以下几部分构成:充电桩和车位锁监控设备、智能车位锁、车位锁蜂鸣器、车位锁中超声感应器、车位中超声感应器、车位锁无车落下开关等。
车位锁安装示意如图3所示。车位锁安装在车位前端,车位锁带有2个超声感应器,其中1个位于车位锁盖子顶部中心位置,另1个安装于车位中央,超声感应器与车位锁控制器之间通过信号线连接。车位锁无车落下按钮安装于充电桩桩体上,通过信号线与充电桩和车位锁控制设备相连接。充电桩和车位锁监控设备与车位锁通过485总线相连,1台充电桩和车位锁监控设备可以同时支持多个车位锁控制。充电桩和车位锁监控设备对车位锁进行控制需要采集充电桩状态、参数,与充电桩内控制器之间通过以太网通信,1台充电桩和车位锁监控设备支持多台充电桩控制器信息采集。
智能车位管理的实现过程如下:
(1)系统处于初始状态。此时地锁处于初始开锁状态,当系统检测充电车辆进入充电车位,语音提示车辆在5 min内开始充电。
(2)若车辆在5 min之内未开始充电,则语音提示车辆离开充电车位,若5 min后仍未离开充电车位或开始充电,则地锁闭锁。此时只能通过联系充电站的运营人员才能解锁。
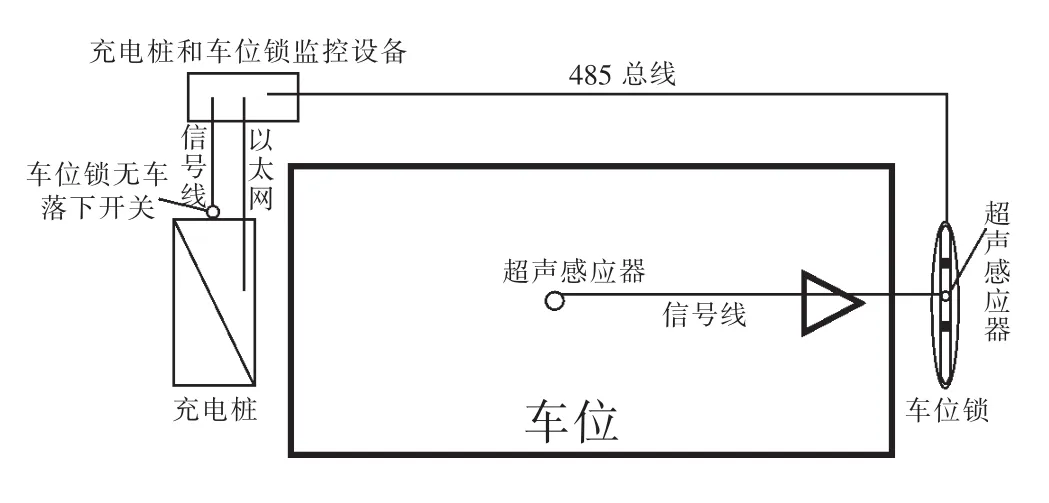
图3 智能车位锁安装示意
(3)若车辆5 min之内开始充电,完成充电5 min后仍未离开充电车位,则系统语音提示车辆离开充电车位,若5 min后仍未离开充电车位,则地锁闭锁。此时只能通过联系充电站的运营人员才能解锁。
(4)若车辆5 min之内开始充电,完成充电5 min内离开充电车位,系统恢复初始状态,等待下一辆充电车辆的到达。
(5)系统具备检测人为强压地锁的功能,当检测到有人强压地锁时,会发出告警提示,监控后台也会语音报警提示运营人员。
2 轨道智能巡检机器人动力系统设计
2.1 轨道设计
轨道机器人轨道为L型轨道[9],如图4所示,采用工字型轻型铝合金,在转弯处设置工字型铝合金弯轨道,轨道半径为100 mm,轨道采用吊挂装置将其吊挂于车棚顶上。为便于摄像头观察充电桩屏幕且不影响行人行走和车辆的停靠,将摄像头的离地高度定为2.5 m,距离充电桩1 m。
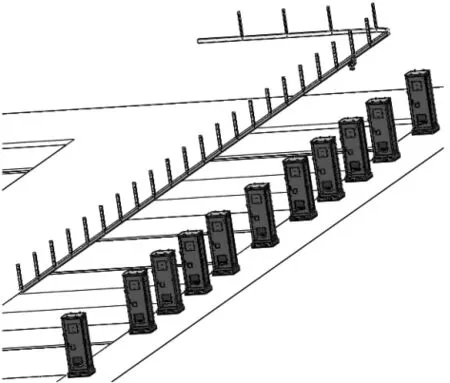
图4 轨道机器人轨道示意
2.2 驱动设计
充电站轨道机器人驱动部分如图5所示,采用齿轮传动机构,经一级变速后带动橡胶轮行走;工字铝4个边沿分别设置引导轮,引导机器人行走,防止行走时产生左右窜动;在工字铝与橡胶轮相对的面设置引导轮,防止行走时产生跳动[10-16]。
轨道机器人行走轮装置分为2个部分:电动机带动的前轮和无驱动的后轮。前轮和后轮的安装底板均放置回转轴承,并与云台的安装底板连接,使转弯时云台不会产生晃动。
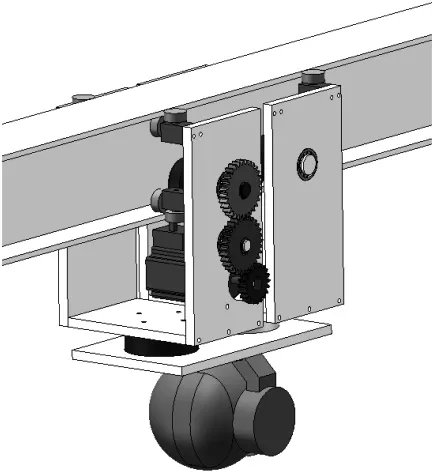
图5 轨道机器人驱动设计
3 轨道智能巡检机器人监控后台设计
轨道机器人的监控后台软件采用了在传统三层体系结构基础上构建的面向业务的四层体系结构,架构如图6所示。
(1)接入层:包括充电桩监测数据的接入、机器人运行数据及巡检分析数据的接入、可见光设备及红外设备视频的接入。
(2)数据层:接收通过接入层传输的数据,包括充电站内所有在线运行充电桩的运行数据、充电状态等;机器人在线运行的实时数据及巡检任务数据;可见光设备的视频及图形数据及红外设备的视频和图像数据。
(3)业务层:主要包含状态监控、视频转发、控制平台、巡检平台、数据分析及统计报表功能模块。
(4)展示层:主要支持可见光设备在线视频的显示;红外设备在线视频的显示;轨道机器人运行轨道地图及巡检任务执行路径的显示;人机交互界面,实现控制命令和巡检任务的执行功能。
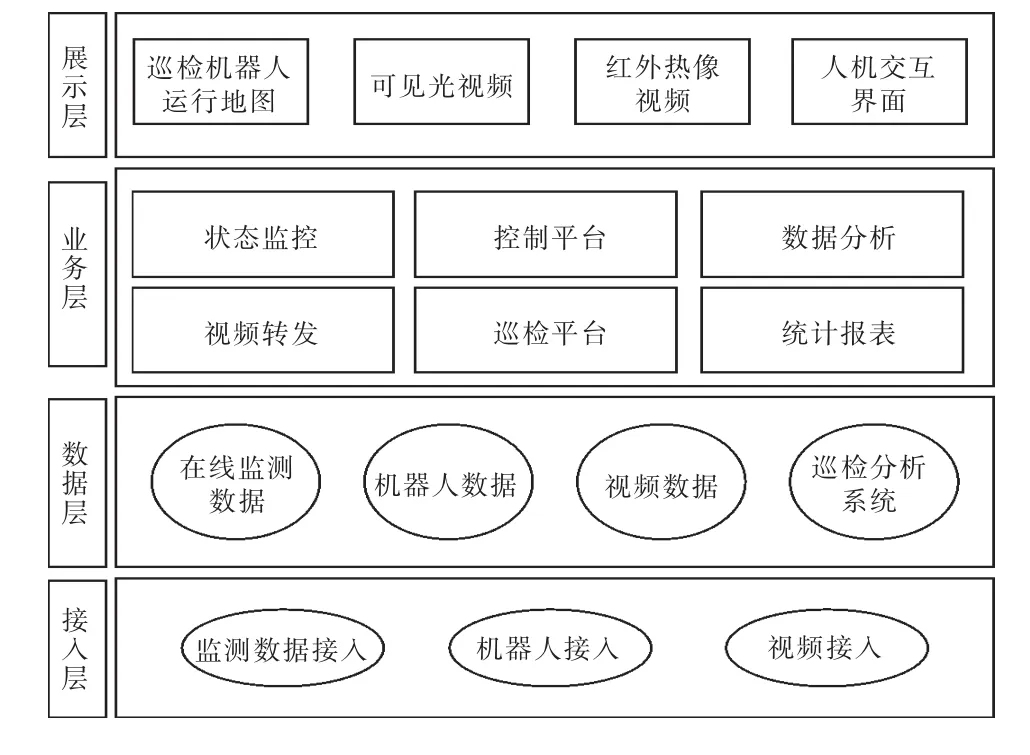
图6 监控后台软件架构
4 应用实例
此处研发的轨道式智能巡检机器人已在浙江省杭州市香樟街国家电网充电站投入运行,运行实景图如图7所示。通过现场运行证明,轨道机器人沿着架设的轨道对充电站充电设备状态进行智能识别实时监管,实现了全天候、多层次、宽领域的巡视工作,有效地提高设备运行健康状态掌握能力,可降低运维人员的劳动强度,实现了充电站运营环境的远程监管,为实现充电站的无人运营提供了技术条件。

图7 香樟路轨道机器人运行实景
5 结语
针对目前充电站内设备巡检方法存在的缺陷和不足等问题,设计研制了一种适用于充电站运营环境的轨道式智能巡检机器人。对该机器人电力驱动系统主要零部件进行了设计选型与校核,结果表明:该机器人的动力系统满足要求。现场运行情况表明:该机器人能够稳定可靠地完成巡检工作,并且将巡检的数据传送至后台,进行显示、存储与分析处理,并根据智能分析的结果对故障设备进行告警提示,提高了充电站内充电设施运行的可靠性。
