转向架构架焊缝疲劳寿命评估的等效热点应力法*
2018-07-11刘建新
谢 鸣, 刘建新, 郭 峰
(西南交通大学 牵引动力国家重点实验室, 成都 610031)
轨道车辆转向架构架是典型的大型焊接结构,其结构失效的主要形式是焊缝的疲劳破坏。由于焊缝处所存在的应力集中效应、高残余应力分布和潜在的焊接缺陷,其疲劳强度远低于金属母材,是焊接结构疲劳强度最薄弱的部位,其疲劳寿命直接决定了整个焊接结构的疲劳可靠性。
目前,针对转向架构架焊缝疲劳可靠性评估应用较为广泛的方法是名义应力法。名义应力法以焊缝在外载荷作用下母板表面的名义应力为基础,结合典型焊缝的名义应力S-N曲线数据和相关的疲劳累积损伤法则对焊接结构进行疲劳寿命评估。随着名义应力法在工程上的广泛应用,相关学者逐渐发现该方法在对大型焊接结构进行疲劳寿命评估时精度不高[1-3],主要原因是当焊接结构的几何形状及承载情况比较复杂时,无论采用解析法还是有限元法,均不能界定出焊趾处严格的名义应力值,无法准确计算焊接结构的疲劳寿命。
针对名义应力法应用于大型焊接结构时精度不高的问题,近年来,热点应力法逐渐被应用于转向架构架焊缝的疲劳寿命评估[4-6]。热点应力是指焊趾处的结构应力,该应力考虑了焊缝几何引起的应力集中效应,比名义应力更精确的反映了焊趾处的真实应力状态。热点应力法是以焊缝在外载荷作用下焊趾热点应力为基础,结合典型焊缝的热点应力S-N曲线数据和相关的疲劳累积损伤法则对焊接结构进行疲劳寿命评估。目前热点应力法根据焊趾热点应力计算方法的不同分为表面外推热点应力法和厚度方向积分热点应力法[7]。表面外推热点应力法是通过取母板表面距焊趾一定距离的若干参考点的应力值并根据相关经验公式来计算焊趾的热点应力,其焊趾应力的计算结果对网格质量比较敏感,在实际应用时局限于外推点的选取,并且对焊趾附近的网格质量要求较高[8-9];厚度方向积分热点应力法是根据焊趾截面力矩等效平衡原则和结构力学理论,采用数值积分方法计算焊趾的热点应力,其焊趾应力计算结果精度较高,但是计算过程相对复杂,计算耗时较长,应用于实际工程结构时效率较低,在实际工程计算中应用较少。
等效热点应力法是由大连理工大学学者刘刚、黄如旭等[10]提出的针对船舶与海洋工程中的复杂焊接结构疲劳寿命评估的一种新算法,在小试件上取得了与疲劳试验较吻合的结果,并已经逐步推广到多轴疲劳领域[11-12],该方法计算简单,效率高,应用范围广,具有较好的工程应用价值。文中将该方法应用到某高速转向架构架上,研究其在大型焊接结构上的应用特点。
1 等效热点应力法的原理和计算方法
1.1 等效热点应力法
焊接结构在焊趾处存在几何突变,由此产生的应力集中现象导致服役焊接结构在焊趾处应力分布复杂,典型的应力分布如图1所示。国内外学者[13-14]通常将焊趾应力按照分布趋势分为线性部分和非线性部分。线性部分包括母板表面的膜应力以及沿母板厚度方向分布的弯曲应力,此部分应力可通过数值积分方法计算;非线性部分包括局部非线性应力,其分布比较复杂,无法精确计算。局部非线性应力是由焊趾缺口引起的处于自平衡状态[14]的特殊应力。目前,不管是采用表面外推热点应力法还是厚度方向积分热点应力法计算焊趾的热点应力,都旨在避开局部非线性应力对焊趾应力计算的影响。由于局部非线性应力沿母板厚度方向处于一种自平衡状态,如图1所示,故在焊趾正下方一定厚度的某一点,局部非线性应力值必然为零,该点处的总体应力仅包含相应的膜应力和弯曲应力,即结构应力,该点也被称为零点,参考图1中的标识。
基于零点应力的特殊性,定义零点的结构应力为焊趾的等效热点应力,这样就可以直接规避局部非线性应力的影响而获得焊趾的热点应力,是一种沿母板厚度方向求解焊趾热点应力的新算法。等效热点应力法即以焊缝在外载荷作用下焊趾处的等效热点应力为基础,结合典型焊缝的热点应力S-N曲线和相关疲劳累积损伤理论来计算焊缝的疲劳寿命。

图1 焊趾截面应力分布和等效热点应力法原理
1.2 零点位置的计算
等效热点应力法应用于大型焊接结构,焊缝疲劳寿命评估的关键是确定焊缝的零点位置。刘刚等在提出等效热点应力法的基础上,通过大量仿真和试验后,提出了适合工程应用的用于确定零点位置的拟合方程,拟
合方程见式(1)。该方程继承了传统热点应力法在计算焊缝疲劳寿命时不考虑焊缝具体几何尺寸的特点,仅考虑了载荷形式对零点位置的影响,通过确定不同载荷形式对应的不同拉伸应力比参数R和板厚t便可计算得到零点的位置d。其中拉伸应力比R是用焊趾表面名义拉应力σT和名义弯曲应力σB之间的关系式来确定的用于表示不同载荷形式对零点位置影响的参数,其表达式见式(2)。
d/t=0.062R+0.066
(1)
R=σT/(σT+σB)
(2)
1.3 等效热点应力法的计算方法
等效热点应力法通常结合有限元方法一起应用于焊接结构中焊缝的疲劳寿命评估。由于小试件本身结构简单,其有限元模型的创建过程比较容易,且能很方便的对焊缝局部的网格进行加密,所以在小试件上应用等效热点应力法一般是先加密焊缝局部的网格,然后根据零点的计算位置选择最精确的1个节点作为零点节点,从有限元仿真求解结果中获取零点的应力数据进而对相应焊缝的疲劳寿命进行分析。对小试件而言,其载荷工况单一,零点的计算过程相对简单。
对于大型焊接结构而言,由于其本身的结构复杂,部件之间的几何组成关系使得在创建有限元模型时必须考虑部件之间的连接关系,工作量较大,最重要的是无法忽略部件间的联系而仅对焊缝局部网格进行加密,所以在大型焊接结构上应用等效热点应力法需要采用子模型技术,将焊缝局部的网格从整体有限元模型中分离出来,根据零点位置的计算结果,在子模型相应的位置上添加零点节点,在有限元仿真求解后提取零点应力数据,最后根据标准提供的焊缝疲劳试验数据和相关疲劳损伤法则计算焊缝的疲劳寿命。大型焊接结构的承载工况比较复杂,采用材料力学的方法计算关键焊缝在组合载荷作用下的零点位置时,计算量相对较大。
采用等效热点应力法分析大型焊接结构上焊缝的疲劳寿命时,有如图2所示的技术路线:
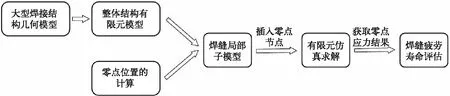
图2 等效热点应力法应用于大型焊接结构的技术路线图
2 关键焊缝的有限元模型
2.1 转向架有限元模型和关键焊缝的选取
文中选择某高速转向架焊接构架为研究对象,以8节点六面体单元为主和4节点四面体单元为辅建立了转向架带焊缝有限元模型,一共包含573 755个实体单元,772 870个节点。疲劳载荷按照EN 13749[15]标准中推荐的3段式准静态载荷加载,载荷总循环次数为107次,载荷工况和约束条件的加载方案如图3所示,其中红色箭头代表载荷,绿色箭头代表添加3个方向的约束。
通过对高速转向架焊接构架进行准静态载荷下的疲劳强度分析,并根据分析结果选择了应力相对较高且位于构架重要承载结构上的4条焊缝,进一步采用等效热点应力法对其进行疲劳寿命的分析。图4为焊缝的局部示意,4条焊缝所在位置分别为:焊缝A位于电机悬挂安装座与横梁侧壁连接处,焊缝B位于电机吊耳安装座与横梁顶板连接处,焊缝C位于牵引拉杆安装座与横梁顶板连接处,焊缝D位于转臂定位装置安装座与构架侧梁顶板连接处。

图3 转向架构架边界条件加载示意图

图4 关键焊缝的局部示意图
2.2 关键焊缝的子模型
在有限元仿真技术的基础上运用等效热点应力法对转向架构架上的关键焊缝进行疲劳寿命计算,需要采用子模型技术进一步对关键焊缝重新划分带零点节点的有限元模型,以获得有限元仿真求解后零点位置的应力结果。
子模型技术是基于圣维南原理,在整体有限元模型的分析基础上获得局部结构更为精确结果的一种有限元方法[16],主要用于对复杂结构进行局部结构的精细研究和优化设计。子模型技术主要是通过将需要单独研究的局部结构从整体模型中沿一定的边界切割出来,被切割出来的部分将继承边界上的位移作为自身的边界条件成为独立的子模型,子模型可以根据不同的研究需求对其进行重新划分网格然后再进行有限元仿真求解。
根据图2所示的技术路线,建立关键焊缝基于等效热点应力法的子模型,需要先确定零点位置。根据不同焊缝的承载情况,采用材料力学公式计算焊趾表面的名义拉应力σT和名义弯曲应力σB,并根据式(1)和式(2)计算出焊缝的拉伸应力比R和焊趾截面的平均零点位置d,4条关键焊缝的零点位置计算结果见表1。根据零点位置的计算结果,采用子模型技术在每条焊缝的母板厚度方向上布置零点节点,创建基于等效热点应力法的子模型,图5为焊缝A和焊缝C通过重新划分网格后的零点子模型示意图。

表1 关键焊缝零点的计算位置
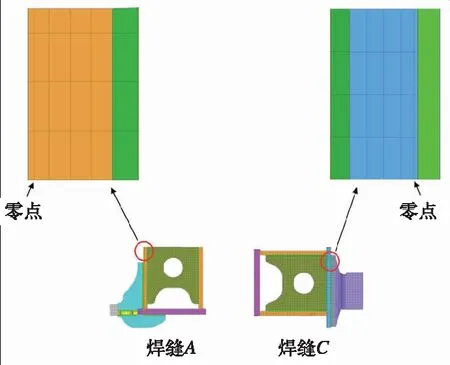
图5 焊缝A和C基于等效热点 应力法的子模型
3 结果分析
3.1 焊趾节点应力分析
取4条焊缝焊趾上等距分布的若干节点,分别采用等效热点应力法和厚度方向积分热点应力法计算目标节点在准静态载荷下的应力,两种方法的节点应力值计算结果如图6所示,其中纵坐标表示焊趾上等距分布节点的应力值,横坐标表示目标节点在焊趾上的相应位置。
厚度方向积分热点应力法是以结构力学理论为基础,通过严格的数值积分公式计算焊趾热点应力,其应力计算结果精度较高。从图6可以看出,采用等效热点应力法计算4条关键焊缝上焊趾节点的应力值沿焊缝长度方向的分布与厚度方向积分热点应力法的计算结果具有较好的一致性,说明等效热点法的焊趾应力计算结果能准确反映焊趾上应力集中的趋势,并且两种方法的曲线整体上比较贴合,说明等效热点应力法作为一种沿母板厚度方向计算焊趾热点应力的新算法,其焊趾应力的计算结果具有可信度。

图6 焊趾节点应力计算值对比图
3.2 焊缝疲劳损伤和疲劳寿命分析
根据焊趾节点应力计算结果,基于最新版BS 7608标准[7]更新的热点应力S-N曲线,并结合线性疲劳累积损伤法则进一步计算4条焊缝的疲劳损伤,并选择焊缝上疲劳损伤最大的点计算焊缝的最短疲劳寿命,焊缝疲劳累积损伤计算结果如图7所示,焊缝疲劳寿命计算结果见表2,其中疲劳寿命以循环次数表示。
分析图7可知,采用等效热点应力法计算焊缝的疲劳损伤沿焊缝长度方向的分布趋势与厚度方向积分热点应力法的结果具有较好的一致性,均准确反映了焊缝长度方向疲劳损伤的分布情况,并且两种方法都是在相同节点位置达到疲劳损伤最大值,结果比较接近。
从表2可以看出采用等效热点应力法计算的焊缝疲劳寿命与厚度方向积分热点应力法的计算结果最大相差6%,充分说明基于子模型技术的等效热点应力法可以很好的应用于大型焊接结构的焊缝疲劳寿命分析。
采用厚度方向积分热点应力法计算焊趾节点时,计算过程比较繁琐,所需时间较长,尤其当母板厚度方向单元层数较多时,计算量巨大。文中所选焊缝的母板厚度方向上都是4层单元,采用厚度方向积分热点应力法时需要在特定位置取每一列五个节点的应力数据并根据积分公式计算焊趾的应力,其后处理时间是等效热点应力法的2倍多,效率太低,当需要对局部结构网格加密进行精确分析时,采用该方法需要的计算代价太高,这也是厚度方向积分热点应力法在工程应用中应用较少的主要原因。等效热点应力法克服了厚度方向积分热点应力法的缺陷,在结果相近的情况下,等效热点应力法的计算不受母板厚度上单元层数的影响,避免了厚度积分热点应力法繁琐的计算过程,结合有限元仿真技术能够快速求解焊趾热点应力,应用于转向架构架疲劳寿命评估时计算效率更高。
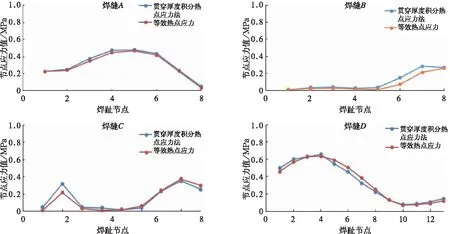
图7 焊缝疲劳损伤计算结果对比图
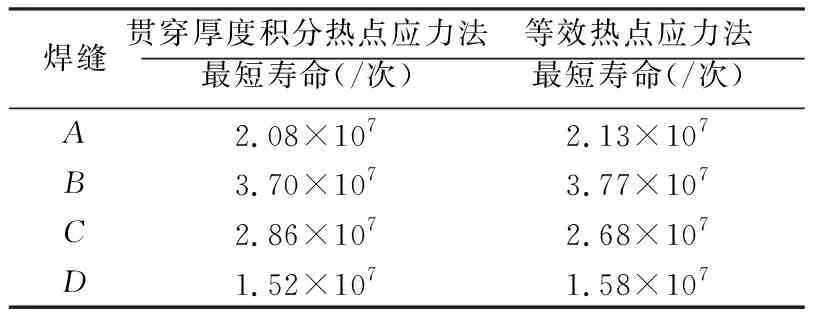
焊缝贯穿厚度积分热点应力法等效热点应力法最短寿命(/次)最短寿命(/次)A 2.08×107 2.13×107B 3.70×107 3.77×107C 2.86×107 2.68×107D1.52×107 1.58×107
4 结 论
(1)通过将等效热点应力法应用于高速转向架构架焊缝的疲劳寿命评估上,按照文中的技术路线对高速转向架构架上的4条关键焊缝进行了疲劳寿命分析,并从焊趾节点应力、焊缝疲劳损伤、焊缝疲劳寿命3个方面获得了与厚度方向积分热点应力法比较一致的计算结果,说明等效热点应力法作为一种新的热点应力算法,可以很好的应用于转向架的疲劳寿命评估。
(2)通过与厚度方向积分热点应力法比较,等效热点应力法在计算高速转向架构架上关键焊缝疲劳寿命时具有计算简单,效率高的特点,适合应用于大型焊接结构的疲劳寿命评估和结构设计。
